一种机械臂轨道运行装置的制作方法
1.本发明属于实验器械技术领域,具体涉及为一种机械臂轨道运行装置。
背景技术:
2.外泌体是由机体内活细胞分泌的携带多种蛋白质,脂质和核酸生物活性物质的具有脂质双分子层的微小囊泡,其直径为30-100nm。细胞通过细胞膜内陷,形成内体,内体不断形成细胞内多囊泡体,当多囊泡体外膜与细胞膜融合后,即被细胞分泌到胞外形成外泌体。
3.外泌体的分离纯化一直是科研工作者关注的问题,获得高纯度的外泌体对后续的研究至关重要。离心法是从生物体液或细胞上清分离外泌体的常用方法。为此,研发了自动化的外泌体富集装置(参见专利:2022108749840一种外泌体富集系统),而在该系统中,如何自动化地有序地向离心机内放入样本是十分重要的环节,因此有必要对该环节的相关器械及系统进行具体设计。
4.本发明针对上述问题,提供一种机械臂轨道运行装置。
技术实现要素:
5.为了克服背景技术中提出的问题,本发明提供一种机械臂轨道运行装置。
6.一种机械臂轨道运行装置,其包括
7.导向装置,包括供机械臂运行的预定轨道,机械臂沿预定轨道相对导向装置移动;
8.固定组件,与所述导向装置固定连接,所述固定组件与外泌体富集装置的操作台固定连接;
9.移动装置,被插入所述导向装置中,且可沿预定轨道相对导向装置移动。
10.进一步,所述导向装置的一端与固定组件固定连接,另一端置与机械臂固定连接;所述移动装置设置在导向装置的内部;所述移动装置包括第一滑动组件与第二滑动组件;所述导向装置的内部设置第一滑道、第二滑道与第三滑道;所述第一滑动组件包括第一滑动组、第三滑动组与第五滑动组;所述第二滑动组件包括第二滑动组、第四滑动组与第六滑动组;所述第一滑动组以及第二滑动组与第一滑道滑动连接;所述第三滑动组以及第四滑动组与第二滑道滑动连接;所述第五滑动组以及第六滑动组与第三滑道滑动连接。
11.进一步,所述导向装置与固定组件固定连接;所述第一滑动组件以及第二滑动组件均与机械臂固定连接。
12.进一步,所述第一滑动组件靠近第二滑动组件的一侧设置第一标识架;所述第二滑动组件靠近第一滑动组件的一侧设置第三传感器;所述第一标志物与第三传感器适配。
13.进一步,所述第一滑动组件的底部设置第二标识架;所述第二滑动组件的底部设置第三标识架;所述导向装置底部的两侧分别设置第一传感器与第二传感器;所述第二标识架与第一传感器适配;所述第三标识架与第二传感器适配。
14.进一步,所述第一滑动组与第二滑动组的结构相同;所述第三滑动组与第四滑动
组的结构相同;所述第五滑动组与第六滑动组的结构相同。
15.进一步,所述导向装置还包括第一固定板、侧板与第二固定板;所述侧板分别设置在第二固定板的两侧;所述侧板的一端与第一固定板固定连接,另一端与第二固定板固定连接。
16.进一步,所述第一滑道、第二滑道与第三滑道均设置在第二固定板朝向第一固定板的一侧;所述第一滑道、第二滑道以及第三滑道均与第二固定板固定连接。所述第二固定板远离第一固定板的一侧与固定组件通过螺栓相连接。
17.进一步,所述第一滑动组件还包括第一缓冲结构与第一安装架;所述第二滑动组件还包括第二缓冲结构与第二安装架;所述第一缓冲结构设置在第一安装架朝向第二安装架的一侧;所述第二缓冲结构设置在第二安装架远离第一安装架的一侧。
18.进一步,所述第一安装架的一侧与机械臂固定连接,另一侧分别与第一滑动组、第三滑动组以及第五滑动组固定连接。具体的,所述第一安装架与机械臂固定连接通过螺栓连接;所述第一安装架分别与第一滑动组、第三滑动组以及第五滑动组通过螺栓连接。
19.进一步,所述第二安装架的一侧与机械臂固定连接,另一侧与第二滑动组、第四滑动组以及第六滑动组固定连接。具体的,所述第二安装架与机械臂固定连接通过螺栓连接;所述第二安装架分别与第二滑动组、第四滑动组以及第六滑动组通过螺栓连接。
20.本发明的有益效果:本技术适用于外泌体富集装置内部,用于为处于同一轨道内部的双机械臂的运动提供一种实施方案。
附图说明
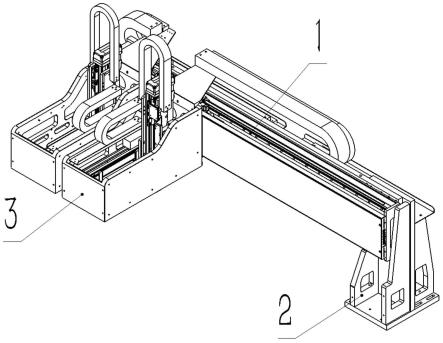
21.图1为一种实现本发明的轨道运行装置的安装示意图;
22.图2为一种实现本发明的轨道运行装置的结构示意图;
23.图3为一种实现本发明的导向装置的结构示意图;
24.图4为一种实现本发明的导向装置的主视图;
25.图5为一种实现本发明的导向装置的侧视图;
26.图6为一种实现本发明的移动装置的结构示意图;
27.图7为一种实现本发明的移动装置的主视图;
28.图8为一种实现本发明的移动装置的侧视图;
29.图9为一种实现本发明的轨道运行装置的剖视图;
30.图中,1、轨道运行装置;11、导向装置;111、第一固定板;112、侧板;113、第二固定板;114、第一滑道;115、第二滑道;116、第三滑道;117、第一传感器;118、第二传感器;12、移动装置;a1、第一滑动组件;a2、第二滑动组件;121、第一安装架;122、第二安装架;123、第一滑动组;124、第二滑动组;125、第三滑动组;126、第四滑动组;127、第五滑动组;128、第六滑动组;129、第一标识架;130、第三传感器;131、第一缓冲结构;132、第二缓冲结构;133、第二标识架;134、第三标识架;2、固定组件;3、机械臂。
具体实施方式
31.以下通过特定的具体实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,本领域技术
人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本技术适用于外泌体富集装置内部,用于为处于同一轨道内部的双机械臂3的运动提供一种实施方案。本技术的方案在使用过程中使用了传感器感知机械臂3在外泌体富集装置内部的位置、双机械臂3之间的相对位置,以防止机械臂3与外泌体富集装置内壁发生碰撞,防止双机械臂3与外泌体富集装置内壁以及双机械臂3之间发生碰撞。
33.如图1-9所示的一种机械臂3轨道运行装置1,其包括导向装置11与移动装置12;移动装置12设置在导向装置11的内部;移动装置12包括第一滑动组件a1与第二滑动组件a2;导向装置11的内部设置第一滑道114、第二滑道115与第三滑道116;第一滑动组件a1包括第一滑动组123、第三滑动组125与第五滑动组127;第二滑动组件a2包括第二滑动组124、第四滑动组126与第六滑动组128;第一滑动组123以及第二滑动组124与第一滑道114滑动连接;第三滑动组125以及第四滑动组126与第二滑道115滑动连接;第五滑动组127以及第六滑动组128与第三滑道116滑动连接。
34.导向装置11与固定组件2固定连接;第一滑动组件a1以及第二滑动组件a2均与机械臂3固定连接。导向装置11分别与第一滑动组件a1以及第二滑动组件a2滑动连接。导向装置11在水平方向上安装,实现机械臂3在水平方向上的运动。由于机械臂3的体积与重量较大,在导向装置11内部设置三组滑道,即第一滑道114、第二滑道115与第三滑道116;其中第一滑道114与第二滑道115为水平方向上的直线滑道,增加第一滑动组件a1以及第二滑动组件a2与导向装置11之间滑动的平稳性;第三滑道116为t型滑道,防止在使用过程中,第一滑动组件a1以及第二滑动组件a2与导向装置11脱离。第一滑动组件a1以及第二滑动组件a2均与第一滑道114、第二滑道115、第三滑道116滑动连接,实现第一滑动组件a1以及第二滑动组件a2在导向装置11的内部稳定的滑动。
35.具体的,如图5、8所示,导向装置11水平安装,其内部的第一滑道114、第二滑道115、第三滑道116也是处于水平状态,从而限定第一滑动组件a1以及第二滑动组件a2只能水平滑动,进而限定了机械臂3的运动方向。通过第一滑道114、第二滑道115、第三滑道116的长度,限定第一滑动组件a1以及第二滑动组件a2的运动范围,进而限定了机械臂3的运动范围。第一滑动组123与第二滑动组124的结构相同;第三滑动组125与第四滑动组126的结构相同;第五滑动组127与第六滑动组128的结构相同。
36.如图1所示的固定组件2,其顶部的侧壁与导向装置11的侧壁通过螺栓相连接,固定组件2的底部与外泌体富集装置的操作台通过螺栓相连接。具体的,固定组件2包括支撑架与固定架,支撑架分别设置在固定架的两侧,支撑架将固定架撑起。使固定组件2呈门型,两支撑架组成左右门框,固定架构成顶部门框,固定架与导向装置11的侧壁通过螺栓相连接。优选的,在支撑架上设置两个以上的加强肋,以增加固定组件2的稳定性,使固定组件2能够承受两机械臂3的重量,防止在使用过程中固定组件2倒塌,而损伤外泌体富集装置。
37.如图6所示,第一滑动组件a1靠近第二滑动组件a2的一侧设置第一标识架129;第二滑动组件a2靠近第一滑动组件a1的一侧设置第三传感器130;第一标志物与第三传感器130适配。第一标识架129的长度便是第一滑动组件a1与第二滑动组件a2之间安全距离的长
度。当第一标识架129与第三传感器130接触时,说明第一滑动组件a1与第二滑动组件a2之间的距离小于安全距离,此时第三传感器130向外泌体富集装置的控制系统发出警报,控制系统停止第一滑动组件a1与第二滑动组件a2之间的相对运动,以防止第一滑动组件a1与第二滑动组件a2碰撞。
38.如图4、7所示,第一滑动组件a1的底部设置第二标识架133;第二滑动组件a2的底部设置第三标识架134;导向装置11底部的两侧分别设置第一传感器117与第二传感器118;第二标识架133与第一传感器117适配;第三标识架134与第二传感器118适配。当第二标识架133接触第一传感器117时,说明第一滑动组件a1即将与导向装置11的内侧壁发生碰撞,此时第一传感器117向外泌体富集装置的控制系统发出警报,控制系统停止第一滑动组件a1的运动,防止第一滑动组件a1即将与导向装置11的内侧壁发生碰撞。当第三标识架134接触第二传感器118时,说明第二滑动组件a2即将与导向装置11的内侧壁发生碰撞,此时第二传感器118向外泌体富集装置的控制系统发出警报,控制系统停止第二滑动组件a2的运动,防止第二滑动组件a2即将与导向装置11的内侧壁发生碰撞。
39.第一标志物与第三传感器130、第二标识架133与第一传感器117、第三标识架134与第二传感器118共同组成了本技术的安全装置,防止第一滑动组件a1与第二滑动组件a2碰撞,防止第一滑动组件a1即将与导向装置11的内侧壁发生碰撞,防止第二滑动组件a2即将与导向装置11的内侧壁发生碰撞。维持了机械臂3在使用过程中的安全性。
40.如图3所示,导向装置11还包括第一固定板111、侧板112与第二固定板113;侧板112分别设置在第二固定板113的两侧;侧板112的一端与第一固定板111固定连接,另一端与第二固定板113固定连接。其中第一固定板111的高度小于第二固定板113的高度,第一滑动组件a1与第二滑动组件a2从第一固定板111的上方与下方伸出到导向装置11之外与机械臂3相连接。
41.一块第一固定板111、一块第二固定板113与两块侧板112共同组成了导向装置11的外壳,第一滑动组件a1与第二滑动组件a2设置在外壳的内部,当第一滑动组件a1或第二滑动组件a2意外从滑轨内部脱离时,第一固定板111将脱离的第一滑动组件a1或第二滑动组件a2限定在导向装置11的外壳内部,防止安装在第一滑动组件a1或第二滑动组件a2上的机械臂3跌落,砸伤操作者或损坏外泌体富集装置内部的其他结构。
42.如图5所示,第一滑道114、第二滑道115与第三滑道116均设置在第二固定板113朝向第一固定板111的一侧;第一滑道114、第二滑道115以及第三滑道116均与第二固定板113固定连接。第二固定板113远离第一固定板111的一侧与固定组件2通过螺栓相连接。具体的,第一滑道114与第二滑道115为垂直于第二固定板113的直线轨道,第三滑道116为与第二固定板113平行的t型轨道。在本技术的一些实施方式中,第三滑道116包括一块c型板与两块矩形板,c型板的开口垂直于水平方向向上,矩形板分别设置在c型板的两侧内壁上,共同组成了t字型轨道。
43.如图6、7所示,第一滑动组件a1还包括第一缓冲结构131与第一安装架121;第二滑动组件a2还包括第二缓冲结构132与第二安装架122;第一缓冲结构131设置在第一安装架121朝向第二安装架122的一侧;第二缓冲结构132设置在第二安装架122远离第一安装架121的一侧。第一缓冲结构131为勺型板状结构,勺柄与第一安装架121固定连接,当第一缓冲结构131与第二缓冲结构132发生碰撞时,勺弓发生形变,为第一滑动组件a1与第二滑动
组件a2之间的碰撞提供缓冲,防止损伤第一安装架121与第二安装架122。第二缓冲结构132为勺型板状结构,勺柄与第二安装架122固定连接,当第二缓冲结构132与导向装置11的侧壁发生碰撞时,勺弓发生形变,为第二滑动组件a2与导向装置11的侧壁之间的碰撞提供缓冲,防止损伤第二安装架122与导向装置11的侧壁。在本技术的一些实施方式中,在第一安装架121远离第二安装架122的一侧设置第三缓冲结构,第三缓冲结构为勺型板状结构,勺柄与第一安装架121固定连接,当第一缓冲结构131与导向装置11的侧壁发生碰撞时,勺弓发生形变,为第一滑动组件a1与导向装置11的侧壁之间的碰撞提供缓冲,防止损伤第一安装架121与导向装置11的侧壁。
44.当安全装置发生故障时,控制系统无法判定第一滑动组件a1与第二滑动组件a2是否处于安全区域内,此时便易于发生第一滑动组件a1与第二滑动组件a2之间的碰撞、第一缓冲结构131与导向装置11的侧壁之间的碰撞、第二缓冲结构132与导向装置11的侧壁之间的碰撞。为防止碰撞时损伤第一滑动组件a1、第二滑动组件a2与导向装置11的侧壁,设置第一缓冲结构131、第二缓冲结构132与第三缓冲结构,通过第一缓冲结构131、第二缓冲结构132与第三缓冲结构的形变为碰撞提供缓冲。
45.如图6-9所示,第一安装架121与第二安装架122均为c字型板状结构,c字的两短臂伸出导向装置11与机械臂3通过螺栓连接。第一安装架121远离机械臂3的一侧分别与第一滑动组123、第三滑动组125以及第五滑动组127相连接。第二安装架122远离机械臂3的一侧分别与第二滑动组124、第四滑动组126以及第六滑动组128相连接。
46.第一滑动组123包括两个与第一滑道114适配的滑块,滑块的背部与第一安装架121螺栓连接;第三滑动组125包括两个与第二滑道115适配的滑块,滑块的背部与第一安装架121螺栓连接。第五滑动组127为与第三滑道116适配的工型块,工型块的底部与第三滑道116滑动连接,第五滑动组127顶部的侧壁与第一安装架121通过螺栓连接。在本技术的一些实施方式中,为降低第五滑动组127与第三滑道116摩擦时产生的振动对第一安装架121的影响,在第五滑动组127的顶部与第一安装架121之间设置第一减震块,第五滑动组127的顶部与第一减震块的底部通过螺栓连接,第一减震块的侧壁与第一安装架121的侧壁通过螺栓连接。
47.如图6-9所示,第二滑动组124包括两个与第一滑道114适配的滑块,滑块的背部与第二安装架122螺栓连接;第四滑动组126包括两个与第二滑道115适配的滑块,滑块的背部与第二安装架122螺栓连接。第六滑动组128为与第三滑道116适配的工型块,工型块的底部与第三滑道116滑动连接,第六滑动组128顶部的侧壁与第二安装架122通过螺栓连接。在本技术的一些实施方式中,为降低第六滑动组128与第三滑道116摩擦时产生的振动对第二安装架122的影响,在第六滑动组128的顶部与第二安装架122之间设置第二减震块,第六滑动组128的顶部与第二减震块的底部通过螺栓连接,第二减震块的侧壁与第二安装架122的侧壁通过螺栓连接。
48.上述实施例的说明只是用于理解本发明。应当指出,对于本领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进,这些改进也将落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1