一种高精度大负载冗余六自由度并联机构的制作方法
1.本发明属于并联机器人技术领域,涉及一种高精度大负载冗余六自由度并联机构。
背景技术:
2.地面或空间大口径光学望远镜,均存在大负载光学部组件位姿失配与面形误差影响成像质量的难题。国内外专家学者集中采用主动光学与自适应光学解决这一难题,即在光电载荷系统中增加可用于精密调整相对位姿的精密主动调整控制装置。此外,进一步针对超大口径主镜分块展开实现形式,通过分块主镜与次镜协同调整,来矫正光场像差。如jwst系统中对位姿调整精度要求最高的次镜与18块主镜的末端调整装置,均采用精度达百纳米级的精密主动调整控制装置来执行光学部件间的相对位姿校正。大口径光学载荷的主、次镜位姿在轨高精度主动调整的空间自由度为五到六个,属于高精度多自由度调整。通过空间多自由度调整装置,可使光学探测系统的各部组件位姿关系回归至理想状态,从而满足系统高分辨率成像的应用需求。因此,多自由度精密主动调整控制装置是实现地面及空间大口径高性能光学载荷在轨主动光学、自适应光学的关键执行机构。
3.在工程实现方面,国内外均普遍采用并联机构来实现六自由度高精度位姿调整。传统的六自由度调整装置由动平台、6个可伸缩的主动驱动支链、12个万向铰链和静平台四大部分组成。静平台固定,动平台与负载相连,平台与主动驱动支链通过铰链链接。由电机驱动支杆进行伸缩运动,实现动平台沿x、y、z轴平移与绕x、y、z轴旋转u、v、w运动。
4.但是,随着对成像分辨率的要求越来越高,望远镜的口径也越来越大,而大负载在不同位姿产生较大干扰力,使得并联机构在运行中主动驱动支链受冲击力明显,铰链及主动驱动支链的形变会影响主动驱动支链的测量精度,而六自由度并联机构的位姿控制又取决于主动驱动支链位置的测量精度,这使得传统的六自由度并联机构的位姿精度受到影响。
技术实现要素:
5.本发明解决的技术问题是:克服现有技术的不足,提出一种高精度大负载冗余六自由度并联机构,克服传统六自由度并联机构在带大负载时精度受到影响的缺陷,实现了大负载六自由度并联机构的高精度。
6.本发明解决技术的方案是:
7.一种高精度大负载冗余六自由度并联机构,包括定平台、动平台、6个主动驱动支链和6个随动冗余测量支链;其中,定平台为水平放置的圆台结构;动平台水平同轴设置在定平台的上方;6个主动驱动支链设置在定平台与动平台之间,连接定平台和动平台;6个主动驱动支链的底端沿定平台周向分布;6个主动驱动支链的顶端沿动平台周向分布;6个随动冗余测量支链设置在定平台与动平台之间,连接定平台和动平台;6个随动冗余测量支链的底端沿定平台周向分布;6个随动冗余测量支链的顶端沿动平台周向分布;6个主动驱动
支链位于6个随动冗余测量支链的周向外侧;主动驱动支链的顶端通过铰链与动平台连接,主动驱动支链的底端通过铰链与定平台连接;随动冗余测量支链的顶端通过球形铰链与动平台连接,随动冗余测量支链的底端通过球形铰链与定平台连接。
8.在上述的一种高精度大负载冗余六自由度并联机构,所述6个主动驱动支链顶端与动平台的交点围成圆形,6个随动冗余测量支链顶端与动平台的交点围成圆形,2个圆形同心,圆心为p;6个主动驱动支链底端与定平台的交点围成圆形,6个随动冗余测量支链底端与动平台的交点围成圆形,2个圆形同心,圆心为o。
9.在上述的一种高精度大负载冗余六自由度并联机构,所述主动驱动支链为主动运动单元,由步进电机、减速器、丝杠导轨组成的伺服运动模块进行驱动。
10.在上述的一种高精度大负载冗余六自由度并联机构,所述主动驱动支链通过开环指令以脉冲当量控制位移,其脉冲当量小于等于随动冗余测量支链的测量元件分辨率。
11.在上述的一种高精度大负载冗余六自由度并联机构,所述脉冲当量为主动驱动支链接受一个脉冲指令时,其位移量的理论值,通过步进电机的步距角、减速器减速比及丝杠的导程求得。
12.在上述的一种高精度大负载冗余六自由度并联机构,所述随动冗余测量支链为随动测量单元,不对定平台和动平台产生约束。
13.在上述的一种高精度大负载冗余六自由度并联机构,所述随动冗余测量支链分为动杆和静杆两部分;其中,动杆通过球铰链与上平台相连,静杆通过球铰链与下平台相连,动杆、静杆间仅有一平移自由度。
14.在上述的一种高精度大负载冗余六自由度并联机构,绝对式光栅尺读数头通过与随动冗余测量支链轴向平行的导轨分别固定于静杆和动杆;位姿调整时,主动驱动支链带动上平台运动,上平台同时也会带动测量支链随动,从而读数头与光栅尺产生相对位移,测得随动冗余测量支链的位移变化,实时进行精确位姿解算。
15.在上述的一种高精度大负载冗余六自由度并联机构,六自由度并联机构的工作过程为:
16.步骤一、建立六自由度并联机构运动学逆解数学模型,建立六自由度并联机构newton-raphson正解数学模型;
17.步骤二、确定运动学逆解数学模型和newton-raphson正解数学模型的结构参数r1、r1、α1、β1、r2、r2、α2、β2、h;
18.步骤三、通过光栅尺读测量6个随动冗余测量支链上下铰点的绝对位置;
19.步骤四、将6个随动冗余测量支链上下铰点的绝对位置带入newton-raphson正解数学模型,解算此时动平台的位姿;
20.步骤五、将此时动平台的位姿带入运动学逆解数学模型,解算此时6个主动驱动支链的实际位置,作为位姿调整前的零位;
21.步骤六、输入动平台的目标位姿a;
22.步骤七、将目标位姿带入运动学逆解数学模型,计算6个主动驱动支链需要调整的位移增量;
23.步骤八、调用伺服运动模块,将6个主动驱动支链的位移增量换算成脉冲数,协调控制6个主动驱动支链协调运动将动平台运动至目标位姿;
24.步骤九、通过光栅尺读测量6个随动冗余测量支链位置,带入newton-raphson正解数学模型,解算动平台当前位姿b;
25.步骤十、计算位姿误差e
p
,e
p
=a-b;
26.步骤十一、将位姿误差e
p
与设定误差阈值进行比较,当e
p
小于误差阈值时,判断本次位姿调整到位,进入步骤十二;否则判断本次位姿调整不到位,返回步骤七;直至调整到位,进入步骤十二;
27.步骤十二、判定是否继续进行下一位姿调整,如果需要,则返回步骤六;否则,结束。
28.在上述的一种高精度大负载冗余六自由度并联机构,所述步骤二中,r1为主动驱动支链顶部铰点圆半径;r1为主动驱动支链底部铰点圆半径;α1为主动驱动支链顶部铰点短边圆心角一半;β1为为主动驱动支链底部铰点短边圆心角一半;r2为随动冗余测量支链顶部铰点圆半径;r2为随动冗余测量支链底部铰点圆半径;α2为随动冗余测量支链顶部铰点短边圆心角一半;β2为随动冗余测量支链底部铰点短边圆心角一半;h为圆心p与圆心o的距离。
29.本发明与现有技术相比的有益效果是:
30.(1)本发明提出的一种高精度大负载冗余六自由度并联机构,提出了六随动冗余测量支链专门负载精确测量六自由度并联机构位姿的设计,克服了大负载大冲击力对主动驱动支链测量精度的影响,解决了大负载高精度位姿调整的问题;
31.(2)本发明提出的一种高精度大负载冗余六自由度并联机构,提出了以随动冗余测量支链精确测量冗余支链位置进而解算位姿的位姿闭环控制方法,解决了并联机构位姿闭环控制难题;
32.(3)本发明中主动驱动支链为主动运动单元,用于实现并联机构的各种位姿调整运动;随动冗余测量支链为精密测量单元,其上下铰点的布局使其免受大负载的冲击力,且不约束平台的任何自由度,仅随动精确测量冗余铰链上下铰点距离,应用运动学正解得到六自由度并联机构的精确位姿,应用于大口径光学中大负载主镜或次镜的精密调整,具有较强的工程应用价值。
附图说明
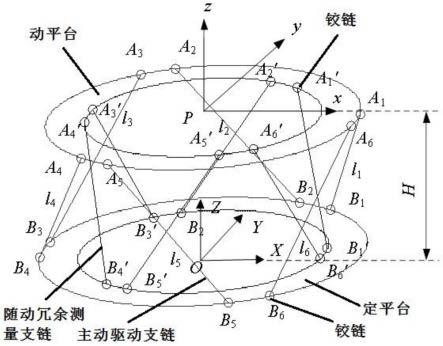
33.图1为本发明六自由度并联机构示意图;
34.图2为本发明动平台铰点分布示意图;
35.图3为本发明静平台铰点分布示意图;
36.图4为本发明六自由度并联机构控系统组成;
37.图5为本发明六自由度并联机构控制流程图。
具体实施方式
38.下面结合实施例对本发明作进一步阐述。
39.本发明提供了一种高精度大负载冗余六自由度并联机构,大负载在不同位姿产生较大干扰力,使得并联机构在运行中主动驱动支链受冲击力明显,主动驱动支链会发生形变,使得采用直线测量元件直接测量主动驱动支链长度的传统方式无法精确测得主动驱动支链长度,即主动驱动支链的形变会影响其测量精度。而六自由度并联机构的位姿控制又
取决于主动驱动支链位置的测量精度,这使得六自由度并联机构的位姿控制精度受到影响。为克服大负载大冲击力对主动驱动支链测量精度的影响,提出了一种测量支链与主动驱动支链分离的冗余六自由度并联机构,包括定平台、动平台、六主动驱动支链、六随动冗余测量支链及控制器。所述定平台和所述动平台之间通过六组相同的主动驱动支链及六组随动冗余测量支链相连。其中主动驱动支链为主动运动单元,用于实现并联机构的各种位姿调整运动;随动冗余测量支链为精密测量单元,其上下铰点的布局使其免受大负载的冲击力,且不约束平台的任何自由度,仅随动精确测量冗余铰链上下铰点距离,应用运动学正解得到六自由度并联机构的精确位姿。控制器用于执行冗余六自由度并联机构的位姿闭环控制算法,实现位姿的精密控制。此种冗余六自由度并联机构的设计,提高了并联机构的大负载运动精度,可应用于大口径光学中大负载主镜或次镜的精密调整,具有较强的工程应用价值。
40.六自由度并联机构,如图1所示,包括定平台、动平台、6个主动驱动支链和6个随动冗余测量支链;其中,定平台为水平放置的圆台结构;动平台水平同轴设置在定平台的上方;6个主动驱动支链设置在定平台与动平台之间,连接定平台和动平台;6个主动驱动支链的底端沿定平台周向分布;6个主动驱动支链的顶端沿动平台周向分布;6个随动冗余测量支链设置在定平台与动平台之间,连接定平台和动平台;6个随动冗余测量支链的底端沿定平台周向分布;6个随动冗余测量支链的顶端沿动平台周向分布;6个主动驱动支链位于6个随动冗余测量支链的周向外侧;主动驱动支链的顶端通过铰链与动平台连接,主动驱动支链的底端通过铰链与定平台连接;随动冗余测量支链的顶端通过球形铰链与动平台连接,随动冗余测量支链的底端通过球形铰链与定平台连接。
41.6个主动驱动支链顶端与动平台的交点围成圆形,6个随动冗余测量支链顶端与动平台的交点围成圆形,2个圆形同心,圆心为p;6个主动驱动支链底端与定平台的交点围成圆形,6个随动冗余测量支链底端与动平台的交点围成圆形,2个圆形同心,圆心为o。
42.主动驱动支链为主动运动单元,由步进电机、减速器、丝杠导轨组成的伺服运动模块进行驱动。主动驱动支链通过开环指令以脉冲当量控制位移,其脉冲当量小于等于随动冗余测量支链的测量元件分辨率。脉冲当量为主动驱动支链接受一个脉冲指令时,其位移量的理论值,通过步进电机的步距角、减速器减速比及丝杠的导程求得。
43.随动冗余测量支链为随动测量单元,不对定平台和动平台产生约束。随动冗余测量支链分为动杆和静杆两部分;其中,动杆通过球铰链与上平台相连,静杆通过球铰链与下平台相连,动杆、静杆间仅有一平移自由度。绝对式光栅尺读数头通过与随动冗余测量支链轴向平行的导轨分别固定于静杆和动杆;位姿调整时,主动驱动支链带动上平台运动,上平台同时也会带动测量支链随动,从而读数头与光栅尺产生相对位移,测得随动冗余测量支链的位移变化,实时进行精确位姿解算。
44.六自由度并联机构的工作过程为:
45.步骤一、建立六自由度并联机构运动学逆解数学模型,建立六自由度并联机构newton-raphson正解数学模型。
46.步骤二、确定运动学逆解数学模型和newton-raphson正解数学模型的结构参数r1、r1、α1、β1、r2、r2、α2、β2、h;r1为主动驱动支链顶部铰点圆半径;r1为主动驱动支链底部铰点圆半径;α1为主动驱动支链顶部铰点短边圆心角一半;β1为为主动驱动支链底部铰点短边
圆心角一半;r2为随动冗余测量支链顶部铰点圆半径;r2为随动冗余测量支链底部铰点圆半径;α2为随动冗余测量支链顶部铰点短边圆心角一半;β2为随动冗余测量支链底部铰点短边圆心角一半;h为圆心p与圆心o的距离。
47.步骤三、通过光栅尺读测量6个随动冗余测量支链上下铰点的绝对位置。
48.步骤四、将6个随动冗余测量支链上下铰点的绝对位置带入newton-raphson正解数学模型,解算此时动平台的位姿。
49.步骤五、将此时动平台的位姿带入运动学逆解数学模型,解算此时6个主动驱动支链的实际位置,作为位姿调整前的零位。
50.步骤六、输入动平台的目标位姿a。
51.步骤七、将目标位姿带入运动学逆解数学模型,计算6个主动驱动支链需要调整的位移增量。
52.步骤八、调用伺服运动模块,将6个主动驱动支链的位移增量换算成脉冲数,协调控制6个主动驱动支链协调运动将动平台运动至目标位姿。
53.步骤九、通过光栅尺读测量6个随动冗余测量支链位置,带入newton-raphson正解数学模型,解算动平台当前位姿b。
54.步骤十、计算位姿误差e
p
,e
p
=a-b。
55.步骤十一、将位姿误差e
p
与设定误差阈值进行比较,当e
p
小于误差阈值时,判断本次位姿调整到位,进入步骤十二;否则判断本次位姿调整不到位,返回步骤七;直至调整到位,进入步骤十二。
56.步骤十二、判定是否继续进行下一位姿调整,如果需要,则返回步骤六;否则,结束。
57.本发明的一种高精度大负载冗余六自由度并联机构如图2所示,冗余六自由度并联机构包括定平台、动平台、六主动驱动支链、六随动冗余测量支链及控制器。所述定平台和所述动平台之间通过六组相同的主动主动驱动支链及六组相同的六组随动冗余测量支链相连。六主动驱动支链为主动运动单元,用于实现机构的各种位姿调整运动;六随动冗余测量支链为精密测量单元,其上下铰点布局使其免受大负载冲击力,六随动冗余测量支链仅随动,负责精确测量冗余支链上下铰链旋转中心即铰点的距离,代入并联机构运动学正解模型解算六自由度并联机构的精确位姿。控制器用于执行冗余六自由度并联机构的位姿闭环控制算法,实现位姿的精密调整。
58.六主动驱动支链为主动运动单元,可由步进电机+减速器+丝杠导轨组成,主动驱动支链无直线测量元件,但可由开环指令以脉冲当量控制位移,其脉冲当量小于等于测量支链的测量元件分辨率。例如如果随动冗余测量支链测量元件为分辨率为10nm的光栅尺,则主动驱动支链的脉冲当量要小于10nm。脉冲当量即主动驱动支链接受一个脉冲指令时,其位移量的理论值,可通过步进电机的步距角、减速器减速比及丝杠的导程求得。
59.六随动冗余测量支链可采用球铰链-平移副-球铰链(sps)结构,测量支链不对上下平台自由产生约束,属于随动测量单元。测量支链分为动杆和静杆两部分,动杆通过球铰链与上平台相连,静杆通过球铰链与下平台相连,动、静杆间有一平移自由度,绝对式光栅尺与其读数头通过与轴向平行的导轨分别固定于静杆和动杆,这样,位姿调整时,主动驱动支链带动上平运动、同时会带动测量支链随动,读数头与光栅尺产生相对位移,从而输出测
量支链的位移变化。由于测量支链上下铰点布局在上平台非承力区域,使其免受大负载冲击力影响,而且绝对式光栅尺精度较高,从而可以实时精确测量冗余铰链上下铰点的距离,用于实时精确位姿解算。
60.步骤1,确定主动驱动支链主动六自由度并联机构结构参数r1、r1、α1、β1、h以及随动冗余测量支链随动测量六自由度并联机构结构参数r2、r2、α2、β2;根据负载口径、重量、冗余六自由度并联机构的工作空间等因素,确定其包络空间,在这个包络空间范围内,进行主动驱动支链和冗余测量支链上下铰点的布局。坐标系及铰点布局如图1、图2、图3所示。
61.如图1所示,六自由度并联机构简化为静平台、动平台、6个主动驱动支链(每个主动驱动支链具有动杆和静杆)及其6个上铰链和6个下铰链;6个随动测量支链(每个随动测量支链具有动杆和静杆)及其6个上铰链和6个下铰链。主动驱动支链六自由度并联机构的结构参数有r1(主动驱动支链动杆铰点圆半径),r1(主动驱动支链静杆铰点圆半径)、α1(主动驱动支链动杆铰点短边圆心角一半)、β1(主动驱动支链静杆铰点短边圆心角一半)和h(并联机构零位时p与o的距离)。随动测量支链六自由度并联机构的结构参数有r2(随动测量支链动杆铰点圆半径),r2(随动测量支链静杆铰点圆半径)、α2(随动测量支链动杆铰点短边圆心角一半)、β2(随动测量支链静杆铰点短边圆心角一半)。确定上述参数,就可以完全描述主动六自由度并联机构的基本结构。为了定量地表示上平台各处的坐标,在下平台铰点所在圆的圆心处建立静坐标系o-xyz,坐标原点为o;在上平台铰点所在圆圆心处建立动坐标系p-xyz,坐标原点为p,各坐标系的方向如图1所示。
62.建立运动学逆解数学模型:
63.并联机构的运动学分析是进行动力学分析、控制策略研究、结构优化设计的基础,因此建立准确的运动学模型对并联机构的研究至关重要。大负载冗余六自由度并联机构结构如图1所示,主动驱动支链和平台之间通过铰链a1、a2、a3、a4、a5、a6和铰链b1、b2、b3、b4、b5、b6连接。随动测量支链和平台之间通过铰链a1’
、a2’
、a3’
、a4’
、a5’
、a6’
和铰链b1’
、b2’
、b3’
、b4’
、b5’
、b6’
连接。下平台作为静平台,以主动驱动支链的位移作为输入变量,则可以控制动平台(上平台)的空间位移和姿态。实际机构中通过改变六根可以伸缩的主动驱动支链长度来实现并联机构动平台的运动,即沿x、y、z轴的平移和绕动坐标系x、y、z轴的转动的欧拉角u、v、w。本发明选取绕动坐标系z
→y→
x坐标轴的顺序旋转,这与以相反顺序绕静坐标系固定轴旋转三次结果相同。经过三次旋转,可以得到式(1)所示的最终旋转变换矩阵的最终旋转变换矩阵用于将动坐标系位姿转换到静坐标系中,即将动平台各点坐标统一在静坐标系中,根据动平台目标位姿计算出主动驱动支链位置(运动学逆解)或根据支链位置求出当前动平台位姿(运动学正解);
[0064][0065]
其中,cu=cos(u),cv=cos(v),cw=cos(w),su=sin(u),sv=sin(v),sw=sin(w)。动平台姿态广义坐标向量q=[x y z u v w]
t
时,各主动驱动支链的长度如公式(2)所示:
[0066]
[0067]
其中矢量li为图1所示的支链矢量a
ibi
,li为支链长度,i=1,2,
…
,6,i表示主动驱动支链的序号。至此,建立了并联机构运动学逆解数学模型。
[0068]
建立运动学正解数学模型:
[0069]
本发明应用newton-raphson法求解六自由度并联机构运动学正解。
[0070]
定义下面的目标向量函数f来描述主动驱动支链伸缩长度的估计值li实测值之间的不同,即:
[0071][0072]
式(3)中,f1……
f6分别表示6个支链伸缩长度的估计值li的平方与实测值的平方之间的偏差。
[0073]
newton-raphson法以目标向量函数f取极小值为目标,求解六自由度并联机构位姿数组q的步骤如下:
[0074]
1)、测量6个主动驱动支链的坐标向量选取运动平台的位姿初值q;
[0075]
2)、基于运动平台的位姿初值q并利用逆解公式计算各主动驱动支链长度l;
[0076]
3)、基于6个主动驱动支链的坐标向量和主动驱动支链长度l,形成数组函数f;
[0077]
步;
[0078]
4)、计算雅克比矩阵
[0079]
5)、利用jδq=-f来计算位姿修正值δq;
[0080]
6)、如果δq
t
δq《ε(ε为位姿误差阈值)成立,则q为所求的位姿,否则,进行下一步;
[0081]
7)、计算q=q+δq,并转到步骤2)。
[0082]
步骤4)中雅克比矩阵的计算公式如下:
[0083][0084]
式中,
[0085]ji1
=2l
ix
[0086]ji2
=2l
iy
[0087]ji3
=2l
iz
[0088]
[0089]ji5
=2(r
row3pbi
(l
ix cos w+l
iy sin u)-l
iz
(
pbix cosv+
pbiy sin v sin u+
pbiz sin v cos u))
[0090]ji6
=2(l
iyrrow1pbi-l
ixrrow2pbi
)
[0091]
li=[l
ix l
iy l
iz
]
t
为第i个主动驱动支链的坐标向量;
[0092]
pbi
=[
pbix pbiy pbiz
]为动平台上第i个主动驱动支链对应的铰点在动坐标系p-xyz坐标系下的坐标向量;
[0093]
表示旋转变换矩阵的第二列;
[0094]
表示旋转变换矩阵的第三列;;
[0095]rrow1
=[cwcu cwsvsu-swcu cwsvcu+swsu],表示旋转变换矩阵的第一行;r
row2
=[swcv swsvsu+cwcu swsvcu-cwsu],表示旋转变换矩阵的第二行;r
row3
=[-sv cvsu cvcu],表示旋转变换矩阵的第三行。
[0096]
步骤2,在adams中建立冗余六自由度并联机构参数化虚拟样机模型;
[0097]
adams(automatic dynamic analysis of mechanical system)即为机械系统动力学分析软件,美国msc公司产品。它将多体动力学建模方法与大位移、非线性分析求解功能相结合,利用该软件可以方便、快速地创建复杂多体动力学虚拟样机模型。然后在几何模型上施加力/力矩,或者其它运动激励。最后执行与实际运动状况相似的仿真测试,输出所要求的位置、力/力矩、速度、加速度等测量值。能远在物理样机建造前,就可以知道各种设计方案的样机是如何工作的。adams/view界面模块是以用户为中心的交互式图形环境,它提出丰富的零件几何图形库、约束库和力库,将便捷的图标操作、菜单操作、鼠标点取操作与交互式图形建模、仿真计算、动画显示、优化设计、x-y曲线图处理、结果分析和数据打印等功能集成在一起。在其提出的零件库中,可以创建各种基本形状的物体。
[0098]
通常用adams软件建模时都是利用其自带的几何体模块建模,确定了几何体的各参数后几何体也随之确定,当几何体尺寸发生变化或需要分析参数对整个系统影响时,就需要手动修改参数,这样就大大增加了工作量。为了避免重复的工作,adams为提出了参数化建模功能,将所建立的模型的特征值都用在adams中设置的设计参数表示,这样修改模型时就只需要修改设计参数,而模型就可以随之改变。特别是在adams中作参数分析时,通过对设计参数在设置区间内的平均化可以自动的更新模型,adams自动进行系列仿真,以便于观察不同参数值下样机性能的变化,这样大大简化了人工修改过程。打开adams软件设置好adams的工作环境之后,就可以定义设计变量。本发明大负载冗余六自由度并联机构的模型就是在adams/view下建立的。将整个并联机构系统简化为静平台即下平台、动平台即上平台、6个主动驱动支链及其12个虎克铰链、6个随动测量铰链及其12个球铰链。在adams中参数化虚拟样机模型如图2所示。
[0099]
步骤3,运动学、动力学仿真,分析冗余六自由度并联机构的运动学、动力学性能;
[0100]
建完模型之后,adams/solver模块自动生成机械系统模型的动力学方程,提出静力学、运动学和动力学的解算结果。adams/postprocessor模块可以用来输出高性能的动画、各种数据曲线,还可以对曲线进行积分、求导、求和、求差等处理。应用这两个模块可以对并联机构的运动学和动力学进行仿真分析。
[0101]
运动学分析
[0102]
当冗余六自由度并联机构的动平台进行位姿调节运动时,其速度和加速度与各杆伸缩的速度和加速度有着严格的依赖关系,但主动驱动支链杆长和动平台位姿之间的关系是非线性的。为了在adams中实现冗余六自由度并联机构虚拟样机动平台6个自由度的运动,在动平台中心处施加一般点运动激励来实现其运动仿真,使动平台实现沿x、y、z轴的移动以及绕x、y、z轴的旋转,以此来模拟动平台在实际工作中的一般运动。
[0103]
通过运动学分析,可以得到冗余六自由度并联机构的工作空间对应各个主动驱动支链及随动冗余测量支链的行程范围,上下铰链的转角范围,平台位姿分辨率对应各个主动驱动支链及六随动冗余测量支链的分辨率。
[0104]
动力学分析
[0105]
对于给定的各主动驱动支链的驱动力或力矩,冗余六自由度并联机构的位姿变化、运动动态过程不仅取决于其几何结构,而且还依赖于各主动驱动支链的惯性,即质量。对于冗余六自由度并联机构,在一定载荷作用下,动平台实现某一运动时,各主动驱动支链的驱动力也将随之变化。运动过程中各主动驱动支链的驱动力变化是否平缓,力的大小是否符合要求,对于机构的设计、伺服执行元件的选择和实际的控制有着重要的意义。这就需要进行动力学分析。
[0106]
冗余六自由度并联机构的动力学分析包括机构的动力学建模、受力分析、惯性力计算、动力平衡、动力响应等方面,在冗余六自由度并联机构的设计与控制中起到非常重要的作用,是确定冗余六自由度并联机构主要结构参数的基础。由于冗余六自由度并联机构的复杂性,其动力学模型通常是一个多自由度、多变量、高度非线性、多参数耦合的复杂系统。利用adams仿真并联机构动力学时,adams会根据机械系统模型,自动建立系统的拉格朗日运动方程,对每个刚体,列出六个广义坐标带乘子的拉格朗日方程及相应的约束方程,并自动求解,不需用户编程计算。
[0107]
做动力学分析时需要知道冗余六自由度并联机构动平台在任意位姿时各驱动支链的出力,可通过对冗余六自由度并联机构做运动学正解得到主动驱动支链出力。
[0108]
步骤4,根据仿真结果设计主动驱动支链和随动冗余测量支链;
[0109]
根据步骤3的运动学分析结果中支链行程分析结果,将主动驱动支链和测量支链的行程都设计为分析结果最大值的1.5~2倍,在确保冗余六自由度并联机构的位姿工作空间同时,也为安全限位等留有裕量。
[0110]
根据动力学分析结果,按照最大负载最严酷的位姿时主动驱动支链受的最大力来分析主动驱动支链所需的力矩,并按照这个最大力矩的1.5~2倍裕量来选取电机和设计减速器。
[0111]
根据步骤3中分析得出的冗余六自由度并联机构位姿分辨率所需的驱动支链分辨率需求,设计的减速器要满足主动驱动支链对分辨率的需求。
[0112]
步骤5,根据步骤4选取的电机及绝对式光栅尺,设计冗余六自由度并联机构控制
器;冗余六自由度并联机构控制系统组成如图4所示,由三大部分组成:上位机控制器、下位机控制器和冗余六自由度并联机构的执行及反馈元件组成。上位机可以是一台普通的pc机,下位机可以是插入pc机机箱的多块pci板卡,与主机通过pci总线通讯。当然,下位机还可以是独立于pc之外的电路板,通过rs232串口或网口与上位机通讯。
[0113]
上位机控制模块主要包括人机界面模块、运动学逆解模块、运动学正解模块、位姿模拟显示模块和与下位机通讯模块。人机界面模块,负责指令的输入与实时位姿、位置显示;运动学逆解模块,负责把目标位姿解算成主动驱动支链位置;运动学正解模块,负责根据随动冗余测量支链位置实时解算出冗余六自由度并联机构的位姿;位姿模拟显示模块,负责生在上位机人机界面上以数据和图形的方式,实时显示冗余六自由度并联机构的运动状态及位姿;与下位机通讯模块,负责与下位机通过pci总线或其他通讯协议进行指令发送和运动状态数据接收。
[0114]
下位机控制模块包括基于dsp+fpga的控制电路板,其中dsp负责逆解模块、伺服算法、正解模块,fpga负责随动测量支链位置反馈数据实时采集。其中逆解模块是根据目标位姿与当前位姿,计算各主动驱动支链的位移增量,形成伺服控制指令;伺服模块是将逆解模块算得的主动驱动支链位移增量按伺服周期驱动各支链电机执行运动,每个伺服周期位移量决定了主动驱动支链的速度;正解模块是根据fpga实时采集的随动冗余测量支链位置,解算当前位姿。驱动电路板负责执行伺服算法模块发出的指令,将指令转化成一定频率和一定数量的方波,驱动各主动驱动支链以合适的速度协调运动到目标位置。
[0115]
六自由度并联机构部分包括主动驱动支链1~6的执行元件:步进电机、减速器、丝杠及限位开关;随动冗余测量支链1~6的测量元件:绝对式光栅尺及限位开关。步进电机负责执行驱动电路板的驱动信号,主动驱动支链位移形成冗余六自由度并联机构上平台的位姿输出;绝对式光栅尺实时记录随动冗余测量支链的直线位移,将支链位置数据发送给控制电路板fpga,形成位置闭环,进而形成并联机构的位姿闭环。在并联机构的运动过程中,fpga实时监测限位信号,在触发限位开关后,直接发送停机指令,避免超限。
[0116]
步骤6,控制流程;
[0117]
其控制实现是有上位机人机界面和下位机dsp、fpga软件共同实现,操作者只需在人机界面输入目标位姿或停止程序,其余都是软件自动实现。控制流程如图5所示,包括如下步骤:
[0118]
步骤1,建立六自由度并联机构的运动学模型,包括建立六自由度并联机构运动学逆解数学模型、正解数学模型;
[0119]
步骤2,参数初始化,包括结构参数r1、r1、α1、β1、r2、r2、α2、β2、h;
[0120]
步骤3,读取六测量支链上下铰点绝对位置;
[0121]
步骤4,调用运动学正解模块,解算此时位姿;
[0122]
步骤5,调用运动学逆解模块,解算此时主动驱动支链的实际位置,记忆此位置,作为本次位姿调整主动驱动支链的零位;
[0123]
步骤6,输入目标位姿;
[0124]
步骤7,调用运动学逆解模块,计算主动驱动支链所需调整位移增量;
[0125]
步骤8,调用伺服运动模块,将主动驱动支链位移增量换算成脉冲数,协调控制六主动驱动支链以合适的速度协调运动到指令位置;
[0126]
步骤9,六随动冗余测量支链随动测量,调用运动学正解,解算到位位姿;
[0127]
步骤10,计算位姿误差,e
p
=目标位姿-当前位姿差;
[0128]
步骤11,判定位姿误差是否小于阈值,如果小于阈值,则本次位姿调整到位,转入步骤12;否则转入步骤7,继续调整位姿;
[0129]
步骤12,判定是否继续进行下一位姿调整,如果需要,则转入步骤6,否则,否则结束。
[0130]
其中比较关键的步骤包括:
[0131]
步骤4、步骤9,读取六随动冗余测量支链上下铰点绝对位置;调用运动学正解模块解算此时位姿;
[0132]
六随动冗余测量支链的实时位置都会由fpga采集进来,调用运动学正解模块,即前述的公式(3)、(4),可实时解算出当前位姿。
[0133]
步骤5、步骤7,调用运动学逆解模块解算此时六主动驱动支链的实际位置,记忆此位置,作为本次位姿调整主动驱动支链的零位;
[0134]
此步骤是根据初始化时的初始位姿,调用运动学逆解模块,即前述的公式(1)、(2),将当前位姿的六主动驱动支链的实际位置计算出来。特别是在步骤5时,由于主动驱动支链无绝对零位,上电后将此位置记忆为零位。
[0135]
步骤8,调用伺服运动模块,将主动驱动支链位移增量换算成脉冲数和脉冲频率,协调控制六主动驱动支链以合适的速度协调运动到指令位置;
[0136]
从伺服控制的角度来说,动平台的运动空间为虚轴空间,而驱动关节空间为实轴空间。因此,在进行运动控制时,必须通过位置逆解模型,将实现给定的动平台位姿和速度信息变换为伺服系统各杆杆长的控制指令,从而驱动并联机构动平台实现期望的运动。
[0137]
将各主动驱动支链的控制量,输入到伺服模块。伺服模块会按照伺服周期驱动各支链以不同的速度运动,以实现各主动驱动支链的协调、精密运动。
[0138]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1