一种具有自感知的软体机器人
1.本发明涉及机器人技术领域,特别涉及一种具有自感知的软体机器人。
背景技术:
2.智能机器人在生活中发挥着越来越广泛的作用,但传统刚性机器人在与自然环境进行交互时,只可平动或转动,对环境适应能力有限,难以适用在复杂的非结构化环境中。为此,基于柔性材料的软体机器人应运而生,亦被称之为软体机器人。软体机器人自身柔软可发生形状变化,拥有无穷自由度,可在废墟狭缝、生物体内完成相关作业。然而,由于刚性传感器的与软体机器人相容性、自身尺寸、机械特性不相符等限制,在一定程度上阻碍了软体机器人发展。
3.随着材料学的飞速发展,具有良好的柔韧性、延展性,可自由弯曲或者折叠,且结构形式灵活多样的柔性传感器在健康检测、人机交互等领域受到广泛关注。郭诗辉等人设计了一种基于人体运动显著性的柔性传感器,其通过构建三维人体模型,并在所述三维人体模型中设置人体体型参数;通过不同操作进行形变分析确定柔性传感器的布线起点和布线方向等,从而对所述柔性传感器的位置进行布局优化,提高了柔性传感器对人体形变信息的捕获能力,能够广泛适用于织物传感器等柔性拉伸传感器。在实际应用中,mxene(迈科烯)柔性应力/应变传感器可以用于监测人体大变形运动,如关节运动、肌肉收缩和小变形的生命信号。除此之外,mxene柔性应力/应变传感器还可以连接无线发射器进行远程监测,为实现远距离人机对话提供一种可能。目前,已有模仿植物的柔性传感器,利用大自然中部分植物的叶片或花瓣作为基底材料的模板,结合一些现代的工艺技术,如石墨烯沉积、金属的溅射等制备柔性电极。非接触式的柔性传感器目前主要利用某些纳米材料原子结构表面上的电子性质,或者利用高分辨率光学传感器,不仅可以实现较高的空间分辨率和灵敏度,还可实现一定范围内的全场传感,从而有效提高监测与监控结构的全面性和连续性。柔性传感器通常还采用还原氧化石墨烯、碳纳米管等作为材料。童凯等人制作了一种柔性石墨烯压力传感器,所述传感器包括柔性基底、微结构底层、电极、石墨烯薄膜和柔性封装层;所述制备方法包括制备石墨烯薄膜,制作柔性基底并在柔性基底上进行倒模操作、制作圆柱体阵列,最终组合制备柔性石墨烯压力传感器。段秋艳等人设计的碳纳米管导电墨水由纤维素和多巴胺的混合溶液修饰碳纳米管制备而成,该碳纳米管导电墨水可用于制备柔性织物基应变传感器。以上的柔性传感器具有高性能、高稳定性、高灵敏度,优异的快速响应特性和耐用性,低成本,实现了绿色制造。
4.虽然目前柔性传感器中可以满足特定对象需求,但是变形期间导电材料接触状态的破坏通常会导致应变传感器的不稳定性。且大多数柔性材料的弯曲度有限,在高精度的测量领域发展受限;柔性基底的材料有限,很多时候制造柔性传感器需要石墨烯材料配合,这也是很久未能解决量产的一种材料;同时应用这些材料制作的软体机器人接收响应的灵敏度较低,不能快速反应,具有不稳定性,在机器人的应用范围较为狭窄。
5.使用水凝胶材料制作的传感器性能较为优越。pam(聚丙烯酰胺)水凝胶在净化水
质等领域具有良好的性能。weiwei fan等人制备的pam水凝胶具有良好的体外细胞相容性,是形状记忆水凝胶,具有可接受的机械和药物释放性能,可应用于伤口敷料。yuyan yang等人制备了一种graphene oxide(go)/polyacrylamide(pam)composite hydrogels。该复合水凝胶形成的主要驱动力为氢键、静电相互作用等。在固定pam(go)浓度下增加go(pam)的量,或在固定的go摩尔比下总浓度的增加与pam的比例为1:1时,go/pam的粘弹性显著提高。该复合水凝胶对有毒染料的吸附更加高效,是一种环境友好的净水剂。通过研究发现加入导电活性材料pedot:pss的pam复合水凝胶具有良好的相容性,机械性能,韧性和可塑性,同时水凝胶的电化学性能也极为优越,具有快速响应能力和优异的电稳定性能。使用该水凝胶制备的柔性应变传感器兼具柔性,可拉伸,可压缩等特性,具有良好的可重复性与工作稳定性,在软体机器人的应用中展现出极大的发展潜力。
6.因而,可以使用该复合水凝胶设计机器人结构并完全嵌入使之成为整体,从而实现软体机器人的自感知(采用物理人工智能的原理实现软体机器人的行为和认知)功能,对软体机器人感知领域发展意义重大。
7.软机器人感知目前有两大类:外部和内部感知。软体机器人外部感知可使用摄像头。利用视觉传感器获取环境信息,对机器人实施反馈运动控制。针对六自由度手眼机器人系统,王大浩等人提出了一种新的基于图像的视觉伺服方法,该方法对图像特征坐标误差施加规定的瞬态和稳态响应,满足了由于相机视场(fov)限制而产生的可见性约束。针对机器人返航路径确定,王兴涛等人提出基于视觉伺服的巡检机器人返航路径确定方法。该方法利用视觉伺服控制方法对巡检机器人的速度进行控制并进行速度数据处理后对巡检机器人的机械参数进行参数整定处理,最后以整定后的参数为基础,规划处理机器人返航路径。有学者提供了一种基于视觉的空间细胞机器人外部状态感知方法。该方法通过建立空间细胞机器人不同种类细胞的图像数据库并进行图像标注,将标记过的图像进行基于深度学习的网络训练,结合相机的内参数,推导出主动连接面与被动连接面之间的相对距离和角度关系。该方法不仅可以测量出与目标物体之间的相对距离和相对转角,还可以根据空间细胞机器人需求识别出不同类型的目标物体及障碍物,角度测量范围也更大,适用于空间细胞机器人任何平移或旋转运动下的外部状态感知。但这些感知方式通常难以用于非结构化的空间中,因此需要研究机器人的内部感知。
8.软体机器人内部感知可使用flex传感器、测斜仪、光导纤维传感器和磁性传感器等工具。李红等人提出了一种用于手指关节角度本体感觉的软光纤曲率传感器,该传感器由保护硅胶层、光纤曲率传感器和两个可穿戴指尖组成。传感器的纤芯模与周围纤芯模之间的光程差会随着曲率的变化而变化,从而引起干涉光谱的偏移。通过传感设备的验证试验,这种传感方法对关节角模型弯曲形状的测量是有效的。当前,消费、专业服务或社交机器人的每个关节几乎都用到2个或更多的磁性角度位置传感器。每个运动轴或关节旋转需要使用至少1个磁性角度位置传感器。当今的许多机器人都采用小而强大的无刷直流电机(bldc)来移动机器人的关节和四肢。为了正确驱动电机,需要知道电机的当前位置。磁性角度位置传感器ic越来越广泛地用来为移动关节的电机控制器提供电机换向反馈,此外,机器人关节的闭环电机控制也需要关节齿轮的角度位置反馈。此类传感器并不适用自身大形变的情况。dong zhou等人通过实时监测加热丝电阻实现tam(由尼龙制成的扭曲人工肌肉)温度自传感控制的方法,实现了对tam温度的精确控制。采用自感知控制方法,实现了18台
tam的同时控制。基于昆虫仿生学原理,采用一种新的步进行走方法,实现了一种具有多运动和承载能力的仿生软六足机器人。此外,由于tam具有良好的环境适应性,仿生机器人可以在陆地和水下条件下实现两栖运动,相应的最大负载能力分别为300g和1kg。这不仅为tams提供了一种可靠的自感知控制方法,也促进了仿生软机器人的发展。lei qin,yucheng tang等人开发了一种具有高机动性和自感知能力的软移动机器人,用于障碍物检测和避障。他们开发了一种将机器人身体建模为可变形电容器的自感知方法。通过测量机器人身体的实时电容,当峰值电容突然下降时,机器人可以检测到障碍物。该传感方法利用机器人本体代替外部传感器实现障碍物的检测,大大降低了机器人系统的重量和复杂度。二维机动性和自感知能力确保了障碍物检测和回避的成功,为轻型智能软移动机器人的发展铺平了道路。
9.近年来随着材料学迅速发展,水凝胶受到广泛关注。水凝胶的材质多种多样。杨志喜等人设计了一种水凝胶贴片及其制备方法和应用,该水凝胶贴片包括层叠设置的第一水凝胶层和第二水凝胶层,第一水凝胶层的含水量为30%~40%,第二水凝胶层的含水量为50%~60%,水凝胶贴片的电导率为150μs/cm~250μs/cm。该水凝胶贴片不仅能够将微针固定在皮肤表面,并且能够配合仪器使用加速微针的溶解,促进有效成分的扩散和吸收,从而大大缩短微针的使用时间,在医疗方面具有重要作用。吕华等人制备了一种聚氨基酸水凝胶,其制备得到的聚氨基酸水凝胶具有优异的生物相容性和生物可降解性,能够很好地支持干细胞生长与软骨分化,并具有很好的免疫调节特性。王晶等人制备了一种半乳岩藻聚糖硫酸酯水凝胶。该水凝胶一方面可抑制细菌生长、吸附炎症因子、减轻伤口炎症,为伤口愈合提供良好的环境;另一方面可促进成纤维细胞的增殖和迁移、促进肉芽组织的生成,促进伤口愈合,特别适用于临床广泛存在的慢性难愈合伤口,例如糖尿病足、褥疮等的治疗与护理。pam水凝胶是一种亲水性高分子聚合物,具有良好的生物相容性,己广泛应用于水处理、石油、电化学等领域。然而一般的pam水凝胶导电性能不佳且力学强度欠缺,这些缺点限制了其在柔性电子领域的应用。pam/pedot:pss水凝胶传感器的灵敏度因子普遍比纯的pam水凝胶传感器的灵敏度因子更高,作为传感材料具有更好的快速响应能力和优异的电稳定性。pedot:pss水凝胶在软体机器人当中的应用展现惊人潜力。pedot:pss水凝胶具有良好相容性,机械性能,韧性和可塑性,同时水凝胶的电化学性能也极为优越,具有快速响应能力和优异的电稳定性能。使用该水凝胶制备的柔性应变传感器兼具柔性,可拉伸,可压缩等特性,具有良好的可重复性与工作稳定性。针对上述优良特性,却鲜有用于软体机器人感知的工作。
10.综上可知,目前机器人在生活中应用时大部分借助的都是外部感知系统,如借助摄像头替代视觉,利用红外激光技术等。具备校正能力和对环境变化作出反应的能力,即自主感知能力的机器人很少。而传统刚性机器人并不适用于自感知系统的应用,传统刚性传感器目前是无法匹配软机器人在非结构空间下的大形变,进行无穷维运动,缺乏感觉和反应限制了其巨大的潜力。
技术实现要素:
11.本发明提供了一种具有自感知的软体机器人,以解决传统刚性机器人并不适用于自感知系统的应用,传统刚性传感器无法匹配软机器人在非结构空间下的大形变,进行无
穷维运动,缺乏感觉和反应限制了其巨大潜力的技术问题。
12.为解决上述技术问题,本发明提供了如下技术方案:
13.一种具有自感知的软体机器人,所述具有自感知的软体机器人包括可形变的软体结构、数显电阻表、控制器、驱动器以及电机;
14.所述软体结构包括上段结构和下段结构;其中,所述上段结构和所述下段结构通过中间过渡结构连接在一起,所述上段结构和所述下段结构中均嵌设有水凝胶传感器,且所述上段结构和所述下段结构中均穿设有用于控制软体结构伸缩弯曲的渔线;所述水凝胶传感器与所述数显电阻表连接,所述数显电阻表用于a/d模块,a/d模块用于将水凝胶传感器的电阻值转换为可通过rs485协议传输到所述控制器中的数字量,所述控制器与所述驱动器连接,所述驱动器与所述电机连接,所述驱动器通过驱动所述电机运转,控制所述软体结构运动。
15.进一步地,所述水凝胶传感器的制备过程,包括:
16.将丙烯酰胺粉末溶解于蒸馏水中,在25℃的超声波振荡下溶解5min,形成水溶液,再将0.2g的pedot:pss加入到所述水溶液中,待溶液混合均匀后,加入交联剂、引发剂和催化剂,然后在冰浴下超声溶解十分钟得到am/pedot:pss前驱体溶液;将所制备的前驱体溶液倒入定制好的聚四氟乙烯板模具中,在60℃烘箱中反应1h,得到pam/pedot:pss水凝胶;
17.使用聚四氟乙烯板模具将pam/pedot:pss水凝胶切割成预设形状;
18.将切割好的水凝胶接上引线,得到所述水凝胶传感器。
19.进一步地,所述交联剂为2-巯基苯甲酸mba,所述引发剂为硫酸铵aps,所述催化剂为四甲基乙二胺temed。
20.进一步地,所述上段结构远离所述下段结构的一端设置有上层圆盘,所述中间过度结构中设置有中层圆盘,所述下段结构远离所述上段结构的一端设置有下层圆盘;其中,
21.所述上段结构内部设置有第一容纳腔和沿所述上段结构的纵向贯穿所述上段结构的第一空心圆柱体,所述第一容纳腔内嵌设有第一水凝胶传感器,所述第一空心圆柱体内穿设有用于控制所述上段结构伸缩弯曲的第一渔线,所述下段结构内部设置有第二容纳腔和沿所述下段结构的纵向贯穿所述下段结构的第二空心圆柱体,所述第二容纳腔内嵌设有第二水凝胶传感器,所述第二空心圆柱体内设置有用于控制所述下段结构伸缩弯曲的第二渔线;
22.所述第一水凝胶传感器的引线穿过所述上层圆盘,从所述上层圆盘向外引出,所述第一渔线一端从所述上层圆盘向外引出,另一端从所述中层圆盘穿出并系紧,然后用胶封住;所述第二渔线一端穿过所述中层圆盘及所述上段结构,并穿过所述上层圆盘,从所述上层圆盘向外引出,另一端从所述下层圆盘穿出并系紧,然后用胶封住,所述第二水凝胶传感器的引线从中层圆盘向外引出。
23.进一步地,所述第一容纳腔和所述第二容纳腔的数量均为三个,每一第一容纳腔内分别嵌设一个第一水凝胶传感器,每一第二容纳腔内分别嵌设一个第二水凝胶传感器;所述第一空心圆柱体和所述第二空心圆柱体的数量均为三个,每一第一空心圆柱体内分别穿设有一条第一渔线,每一第二空心圆柱体内分别穿设有一条第二渔线。
24.进一步地,所述第一容纳腔的长度比所述第一水凝胶传感器的长度长2mm,以便在安装所述第一水凝胶传感器后,通过盖子封住所述第一容纳腔,对所述第一水凝胶传感器
进行密封,且每个盖子上开设有供传感器引线穿出的孔;
25.所述第二容纳腔的长度比所述第二水凝胶传感器的长度长2mm,以便在安装所述第二水凝胶传感器后,通过盖子封住所述第二容纳腔,对所述第二水凝胶传感器进行密封,且每个盖子上开设有供传感器引线穿出的孔。
26.进一步地,所述水凝胶传感器的数据标定过程,包括:
27.将水凝胶传感器集成到软体机器人上后,使用数显电阻表测量水凝胶传感器的电阻变化,并通过python程序记录电阻变化数据并分析拟合数据,同时,实时捕捉软体机器人的状态,并测量软体机器人的角度变化;
28.在通过电机驱动软体机器人动作期间,同步软体结构弯曲角度和水凝胶传感器电阻值的测量,以进行数据分析,得到电阻值与弯曲角度的对应关系。
29.进一步地,软体机器人在进行数据通信时,使用rs485协议传输通信数据。
30.本发明提供的技术方案带来的有益效果至少包括:
31.本发明的优点在于使用新型水凝胶柔性材料制造出的传感器,在此基础上进行信号采集,标定,信号输出等系列工作,制造了具有自感知功能的级联结构灵活性更高的软体机器人,采用物理人工智能的形式,实现了软体机器人的自感知。它不仅相较于刚性机器人更为灵活和通用,增加了机器人的自主感知能力,而且对外部刺激能够做出敏感响应,为闭环控制的实现提供了重要保障。
附图说明
32.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
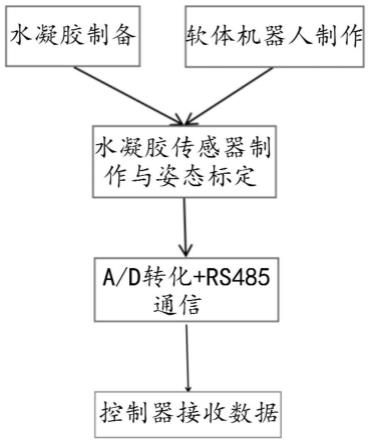
33.图1是本发明实施例提供的软体机器人设计原理图;
34.图2是本发明实施例提供的pam/pedot:pss水凝胶传感器的制备流程图;
35.图3是本发明实施例提供的软体机器人结构示意图;
36.图4是本发明实施例提供的测定接线示意图。
37.附图标记说明:
38.1、第一通孔;2、第二通孔;3、第三通孔;4、第四通孔;5、第五通孔;
39.6、第六通孔;7、第七通孔;8、上层圆盘;9、中层圆盘;10、下层圆盘。
具体实施方式
40.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
41.本实施例提供了一种具有自感知的软体机器人,使用新型材料pam/pedot:pss水凝胶实现自感知;其中,pam是聚丙烯酰胺,pedot是3,4-亚乙二氧基噻吩单体的聚合物,pss是苯乙烯磺酸盐单体的聚合物,三者通过有机结合形成pam/pedot:pss水凝胶。本实施例首先根据该水凝胶材料的电阻特性,进行阻值与弯曲姿态的标定。对此,需要说明的是,一般在姿态标定过程中测定阻值时会产生一定的误差,因此,本实施例使用四线法测量水凝胶
电阻,使用这种方法可以最小程度减小导线电阻给水凝胶电阻测量带来的误差。水凝胶的测定阻值由trm数显电阻表显示,trm数显电阻表被用于系统a/d模块,a/d模块在系统中负责的是将水凝胶的电阻值这种模拟量转化为可以通过rs485协议传输到主控制器(树莓派)中的数字量,串联起各个部件之间的联系。通信部分使用rs485协议传输,rs-485接口具有良好的抗噪声干扰性,长的传输距离和较高的数据传输速率,在多种接口中使用效果较好。
42.此外,市面上多数软体机器人结构为单段,使用范围较为狭窄,灵活度较低,对此,本实施例制作双段软体机器人,在同样的驱动作用下具有更高的灵敏度。用来实现软体机器人自感知功能的传感器制作方面使用了新型混合水凝胶材料制作,与普通的传感器相比具有更好的快速响应能力和优异的电稳定性。
43.具体地,请参阅图1至图4,本实施例的具有自感知的软体机器人包括可形变的软体结构、数显电阻表、控制器、驱动器以及电机;
44.所述软体结构包括上段结构和下段结构;其中,所述上段结构和所述下段结构通过中间过渡结构连接在一起,所述上段结构和所述下段结构中均嵌设有水凝胶传感器,且所述上段结构和所述下段结构中均穿设有用于控制软体结构伸缩弯曲的渔线;所述水凝胶传感器与所述数显电阻表连接,所述数显电阻表用于a/d模块,a/d模块用于将水凝胶传感器的电阻值转换为可通过rs485协议传输到所述控制器中的数字量,所述控制器与所述驱动器连接,所述驱动器与所述电机连接,所述驱动器通过驱动所述电机运转,控制所述软体结构运动。
45.下面,对本实施例的软体机器人的结构及设计过程进行具体说明。
46.①
pam/pedot:pss水凝胶传感器的制备,其流程如图2所示,包括:
47.将丙烯酰胺粉末溶解于蒸馏水中,在25℃的超声波振荡下溶解5min,形成水溶液,再将0.2g的pedot:pss加入到所述水溶液中,待溶液混合均匀后,加入交联剂mba(2-巯基苯甲酸)、引发剂aps(硫酸铵)和催化剂temed(四甲基乙二胺),然后在冰浴下超声溶解十分钟得到am/pedot:pss前驱体溶液;将所制备的前驱体溶液倒入定制好的聚四氟乙烯板模具中,在60℃烘箱中反应1h,即可得到pam/pedot:pss水凝胶;
48.使用聚四氟乙烯板模具将pam/pedot:pss水凝胶切割成所需的形状;
49.具体地,本实施例将水凝胶传感器切割为圆柱形状,其长度为50mm,直径φ5mm,将切割好的水凝胶包装后作为传感器在软体机器人实现嵌入式感知。
50.②
软体机器人的设计
51.本实施例的软体机器人主要分为上下两段结构,如图3所示。所述上段结构远离所述下段结构的一端设置有上层圆盘,所述中间过度结构中设置有中层圆盘,所述下段结构远离所述上段结构的一端设置有下层圆盘;其中,
52.1.上半段结构
53.上半段机器人总体长100mm,上层圆盘8横截面尺寸为φ20mm,厚度h=2mm,上层圆盘8上共7个通孔。第一通孔1、第二通孔2、第三通孔3孔径为φ5mm,用于安装水凝胶传感器,上半段放置水凝胶传感器的容纳腔的横截面尺寸为φ5mm,长度为52mm,比水凝胶传感器的长度长2mm,是为了能够使用材料为软胶20a的,厚度为2mm,横截面与对应容纳腔相同的盖子封住传感器,每个盖子上有两个小孔,两个孔可以引出水凝胶传感器的两根接线;其中,容纳腔的数量为三个,每个容纳腔内嵌设一水凝胶传感器;放置渔线的空心圆柱体长度为
100mm,贯穿整个上半段结构,第四通孔4、第五通孔5、第六通孔6的孔径为φ1mm,每个孔可以分别引出控制上半段结构伸缩弯曲的一根渔线;第七通孔7的孔径为φ4mm,第七通孔7对应的空心圆柱体长为100mm,也贯穿整个上半段结构,可以用于引出控制下半段结构的三根渔线。
54.2.中间过渡结构
55.中层圆盘9横截面的尺寸为φ18mm,厚度h=2mm,共13个孔,除中间的孔为φ4mm外,其余每个孔为φ1mm。
56.3.下半段结构
57.下半段结构与上半段结构相似,只有部分尺寸上的差异。
58.下半段结构长为100mm,用于安置水凝胶传感器的三个容纳腔的横截面为φ5mm,长度为52mm,比水凝胶传感器的长度长2mm,是为了能够使用材料为软胶20a的厚度为2mm,横截面与对应容纳腔相同的盖子封住传感器,每个盖子上有两个小孔,两个孔可以引出水凝胶传感器的两根接线;放置渔线的空心圆柱体的横截面为φ1mm,长度为100mm,贯穿整个下半段结构。
59.控制上半段结构运动的三根渔线从中层圆盘9的三个小孔向下穿出并系紧,然后用胶封住这三个小孔,以更好的控制牵引上半段结构的伸缩弯曲运动;控制下半段结构伸缩弯曲的三根渔线通过中层圆盘9的另外三个小孔向上穿出并通过上半段结构的第七通孔7向外引出。每个水凝胶传感器需要引出两根线,剩下的六个小孔每两个小孔引出一个水凝胶传感器的两根接线。下层圆盘10横截面为6.53*2mm,厚度h=2mm,共3个φ1mm的小孔,控制下半段结构的三根渔线可以从这三个小孔向下穿出并系紧,然后用胶封住这三个小孔。
60.通过水凝胶传感器在软体机器人中的内嵌式结构设计,当控制机器人运动的渔线进行拉伸牵引时,水凝胶传感器也会实现一定程度的弯曲或伸缩,例如当拉伸第四通孔4引出的渔线时,软体机器人会向右上方弯曲,再通过已测定的水凝胶弯曲角度与阻值的关系,传给电脑以一定阻值来判断软体机器人的运动,以此来实现软体机器人的自感知功能。
61.③
接线与测量过程,如图4所示
62.1.接线:
63.电机:驱动器的vcc接24v电源,gnd接电源地线,pul-和dir-接树莓派gnd,pul+接树莓派p23,dir+接p24
64.rs485扩展版通过排针和树莓派连接;
65.测电阻:测量端四根线插入水凝胶中,vcc和gnd接树莓派的5v和gnd,485a和485b接扩展版的channle 1的a和b。channle 1的g和树莓派的gnd相连。
66.2.数据标定:
67.将水凝胶传感器集成到软体机器人上后,使用trm数显电阻表测量电阻变化,并通过python程序记录数据以及分析拟合数据。同时,实时捕捉软体机器人的状态,并通过人工测量软体机器人的角度变化。在通过电动机驱动软体机器人动作期间,同步软体结构角度和水凝胶传感器电阻的测量,以进行数据分析,得到电阻值与弯曲角度的对应关系。
68.3.信号转换:
69.水凝胶电阻经过测电阻器的测量,通过rs485实现模数转换,经程序处理后得到阻值对应的弯曲度,实现弯曲角度的感知。
70.综上,本实施例将新型材料pam/pedot:pss水凝胶应用到双段软体机器人中,设计了软体机器人内部结构,制作水凝胶传感器组装软体机器人,并对其进行姿态标定,通过a/d转换,rs485传输和控制器通信等工作使其真正实现了自主感知的能力,它不仅相较于刚性机器人更为灵活和通用,增加了自主感知能力,且对外部刺激可做出敏感响应,为闭环控制的实现提供了重要保障。
71.此外,需要说明的是,在本文中,诸如第一和第二之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
72.最后需要说明的是,以上所述是本发明优选实施方式,应当指出,尽管已描述了本发明优选实施例,但对于本技术领域的技术人员来说,一旦得知了本发明的基本创造性概念,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明实施例范围的所有变更和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1