一种基于黎曼运动策略的机器人运动策略生成方法
本发明涉及机器人在线运动规划领域,尤其涉及一种基于黎曼运动策略的机器人运动策略生成方法。
背景技术:
1、运动规划是机器人学中最活跃的研究领域之一。运动规划是一个寻找从开始状态到目标状态的机器人运动的问题,其间要避免碰到环境中的障碍物,同时需要满足其他约束条件,如关节极限或扭矩极限。根据规划的位形空间维度和种类不同,运动规划可以分为移动机器人运动规划和机械臂运动规划。移动机器人运动规划以轮式机器人和无人机为主,轮式机器人的位形空间是特殊欧式群se(2),而无人机的位形空间是特殊欧式群se(3)。机械臂的位形空间即关节空间。运动规划通常在上述位形空间或它们的子空间中进行,在位形空间中,机器人被视为一个质点。
2、根据环境中障碍物的运动情况,运动规划可以划分为静态环境中的运动规划和动态环境中的在线运动规划。其中在线运动规划需要处理动态变化的现实环境,这就需要机器人能对当下的状态实时地更新动作。因此这样的运动规划算法,可以看作是一个运动策略,即根据当前的状态,返回一个满足约束的动作。当下的机械臂在线运动决策算法,一般是使用人工势场法及其改进算法,或者使用模型预测控制的方法。人工势场法容易陷入局部极小值,且运动易出现抖动,对于较复杂的环境效果不佳。而模型预测控制方法是需要实时计算非线性优化问题,因此实时性并不是很高,也较容易陷入局部最优。因此,设计一种实时性高,且不易陷入局部极小值、能够适应较复杂环境的在线运动决策算法具有重要的意义。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于黎曼运动策略的机器人运动策略生成方法。黎曼运动策略是一类反应性运动策略,旨在将非欧几里得系统参数化并描述为虚拟的动力学系统。在非线性的任务空间中,给出一组分别为每个子任务设计的策略,黎曼运动策略可以结合这些策略并生成一个最优的全局策略,同时利用稀疏的矩阵结构来提高计算效率。
2、本发明的目的在于针对现有的运动规划算法无法很好适应多任务动态环境的问题,提供一种基于黎曼运动策略的机器人在线多任务运动生成方法。本发明可以产生合适且实时适应环境变化的机器人避障和接近目标点的行为,而不需要全局的规划器。
3、本发明的目的是通过以下技术方案来实现的:
4、一种基于黎曼运动策略的机器人运动策略生成方法,该方法包括以下步骤:
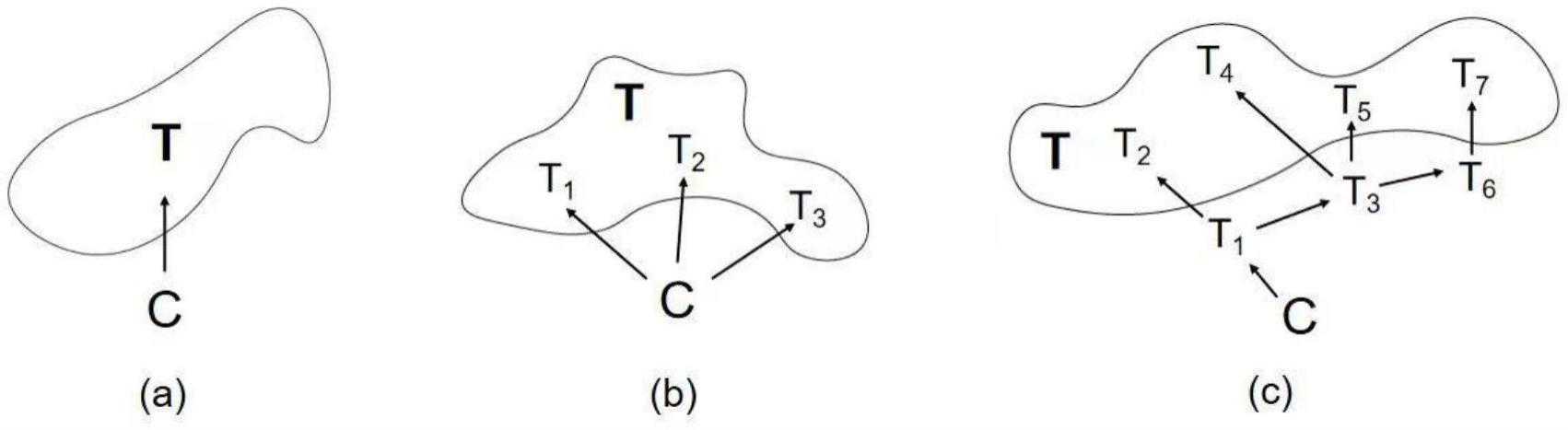
5、(1)构造任务映射树:明确系统所要执行的任务,并把任务分解为若干个子任务,获得各个任务映射将子任务空间作为叶节点,全局任务空间作为根节点,构造出一颗任务映射树;(具体为,将任务映射分解为一颗任务映射树,即将任务流形t分解为若干个子任务流形{ti},将任务映射φ分解为若干个子任务映射子任务流形再次分解为若干个更小的子任务流形组成一颗任务映射树,根据不同方式对任务分解可得到不同的任务映射树;)
6、(2)建立几何动态系统:由步骤(1)获得的任务映射树,对每个子任务设计运动策略;在每个子任务空间建立一个合适的几何动态系统;
7、(3)生成策略:由前推和回拉两种运算操作组成,所述前推是将状态从任务映射树的父节点传播到任务映射树的子节点的运算操作;所述回拉是将任务映射树的子节点的状态和加速度反向传播到任务映射树的父节点并获得父节点加速度的运算操作;即在每一个控制周期,先使用前推操作递归地传播每个子任务空间中的位置和速度信息,根据步骤(2)中的几何动态系统获得子任务空间的加速度,再使用回拉操作递归地获得每个任务空间的加速度最终获得全局任务的加速度。
8、进一步地,所述步骤(1)具体为:将任务映射分解为一颗任务映射树,将任务流形t分解为若干个子任务流形{ti},将任务映射φ分解为若干个子任务映射子任务流形再次分解为若干个更小的子任务流形组成一颗任务映射树,根据不同方式对任务分解可得到不同的任务映射树。
9、进一步地,所述步骤(1)得到的任务映射树能在不同子任务映射之间共享计算资源。
10、进一步地,所述步骤(2)对每个子任务设计运动策略,具体为,设某子任务空间ti为m维流形,其具有坐标x∈rm,将运动策略视作在ti中的加速度和惯量记作其中a:rm×rm→rm×m是一个连续的映射,m:是一个可微映射,表示m×m维的对称半正定矩阵,其中所述加速度和惯量是流形ti中关于位置x和速度的函数;所述rm是m的维向量;rm×m是m行m列的矩阵;
11、通过人为设计,则通过在ti中建立一个动力学系统来确定;令g:b:φ:rm→r所述g、b和φ为三个都是光滑的函数,φ为把一个m维向量映射到实数的函数;称元组(ti,g,b,φ)在流形ti上构成几何动态系统,当且仅当它们满足:
12、
13、其中:
14、
15、
16、上式中为度量矩阵,为阻尼矩阵,φ(x)是势场函数且有下界;为对x求梯度;诱导出了曲率项和当时,几何动态系统退化为简单动力学系统,所述将等价于科里奥利力;gi表示表示矩阵g的第i列向量;此外,加入速度的依赖使得系统对速度的大小和方向做出反应,从黎曼几何的角度来讲,加入速度的依赖改变了该空间中黎曼度量,且允许系统根据速度方向对空间进行变形。
17、进一步地,所述步骤(3)所述前推,具体为,给定父节点u的状态计算出每个子节点vi的状态是映射的雅可比矩阵;所述yi和分别表示为第i个叶子节点的位置和速度。
18、进一步地,所述步骤(3)中的回拉,具体为,将子节点的状态和加速度反向传播到父节点并获得父节点加速度的运算操作,最优的父节点加速度的计算可根据以下最小二乘公式:
19、
20、其中,是当前节点的速度,是第i个子节点的加速度,mi是第i个子节点空间中的几何动,即子任务空间。
21、进一步地,所述步骤(3)中每一个控制周期为算法的一个循环,完成一个循环,即一个控制周期。
22、本发明的有益效果如下:
23、利用本发明可以实现机器人的在线多任务决策问题,比如实时追踪目标物的同时以较优的轨迹避开移动的障碍物,且具有很高的实时性。本发明也可以解决机器人的单个任务的决策问题,比如单独实现机器人的在线避障的行为或者在线目标追踪行为。
技术特征:
1.一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(1)具体为:将任务映射分解为一颗任务映射树,将任务流形t分解为若干个子任务流形{ti},将任务映射φ分解为若干个子任务映射子任务流形再次分解为若干个更小的子任务流形组成一颗任务映射树,根据不同方式对任务分解可得到不同的任务映射树。
3.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(1)得到的任务映射树能在不同子任务映射之间共享计算资源。
4.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(2)对每个子任务设计运动策略,具体为,设某子任务空间ti为m维流形,其具有坐标x∈rm,将运动策略视作在ti中的加速度和惯量记作其中a:rm×rm→rm×m是一个连续的映射,m:是一个可微映射,表示m×m维的对称半正定矩阵,其中所述加速度和惯量是流形ti中关于位置x和速度的函数;所述rm是m的维向量;rm×m是m行m列的矩阵;
5.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(3)所述前推,具体为,给定父节点u的状态计算出每个子节点vi的状态是映射的雅可比矩阵;所述yi和分别表示为第i个叶子节点的位置和速度。
6.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(3)中的回拉,具体为,将子节点的状态和加速度反向传播到父节点并获得父节点加速度的运算操作,最优的父节点加速度的计算可根据以下最小二乘公式:
7.根据权利要求1所述的一种基于黎曼运动策略的机器人运动策略生成方法,其特征在于,所述步骤(3)中每一个控制周期为算法的一个循环,完成一个循环,即一个控制周期。
技术总结
本发明提出一种基于黎曼运动策略的机器人运动策略生成方法。该方法将全局任务分解成若干个子任务构造出任务映射树,并把每个子任务都建模成加速度,在每个子任务空间建立满足任务目标的几何动态系统。父任务到子任务的映射通过前推操作实现,而子任务到父任务的映射通过回拉操作实现。在算法的每一个控制周期,先使用前推操作在任务映射树上递归地传播每个子任务空间中的位置和速度信息,根据几何动态系统获得子任务空间的加速度。再使用回拉操作获得每个上一级任务空间的加速度并最终获得全局任务的加速度。该方法将机器人的复杂的非线性运动规划问题转变成线性问题,从而避免了求解耗时的非线性优化问题,极大地提高了规划的速度。
技术研发人员:吴俊,梁世豪,朱秋国
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!