一种全景固态激光雷达和移动机器人导航系统的制作方法
本发明实施例涉及智能机器人,尤其涉及一种全景固态激光雷达和移动机器人导航系统。
背景技术:
1、随着机器智能化的快速发展,越来越多的移动机器人被应用于工业生产及人们的日常生活中,如自动导航的智能搬运机器人、扫地机器人等,其中导航是目前移动机器人领域研究的重要课题,移动机器人为了更好的完成任务,需要有精准快速的导航系统用于生成自身的环境地图,确定自身的位置信息,并根据对环境地图的理解规划出最佳工作路径,提高工作效率。
2、当前市面上主要有三类导航,可以分为惯性导航、视觉导航和激光导航,其中,激光导航是目前市场上大部分移动机器人采用的导航技术。激光导航一般是在移动机器人头部设置一颗凸起的激光收发模组,通过机械旋转部件带动发射模组360°高速旋转,向周围投射点状激光束,再通过接收模组接收物体反射的回波信号,并利用三角测距原理,确定移动机器人与周围环境的物体之间的距离,从而生成环境地图来实现导航功能。但是,这种测距导航方式存在如下问题:
3、1)机械旋转部件易磨损,且结构稳定性差,会影响整个激光收发模组的使用寿命;
4、2)激光收发模组的旋转需要相应的旋转结构及电机来实现,电机成本和体积较大,导致整个激光收发模组的体积和成本增加,不利于系统的小型化和降成本设计,且采用旋转方式测距也会影响测距系统的稳定性;
5、3)在实际使用中,由于激光收发模组整体旋转负载较重及电机的固有性质,扫描时间较长导致帧率较低,旋转式360°的激光收发模组的深度图输出频率最大只能到20hz,不利于有快速移动物体场景的导航,限制了使用场景;
6、4)基于三角测距原理的测距系统,发射模组和接收模组之间距离越大(基线距离越大),可精确测量的距离越远,但基线距离越大对应整个测距系统的体积也会越大,一般测量基线距离有限制,导致整个测距系统可精确测距范围也受到限制,如最大只能达到十米量级,不利于远距离场景的导航应用。
技术实现思路
1、本发明实施例提供一种全景固态激光雷达和移动机器人导航系统,以解决上述测距导航方式中的技术问题。
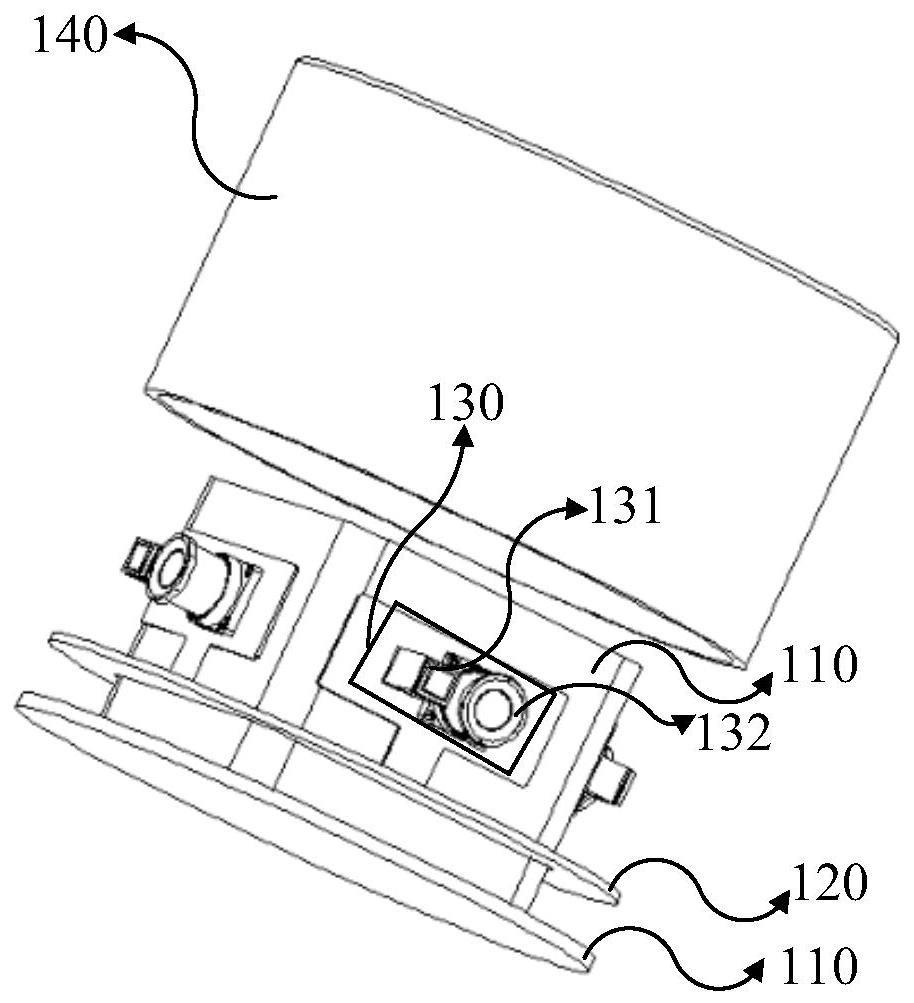
2、第一方面,本发明实施例提供了一种全景固态激光雷达,包括多个dtof模组;
3、所述多个dtof模组设置于第一平面上且沿圆周依次排列,所述多个dtof模组的光轴分别朝向不同的径向方向;
4、所述dtof模组包括激光投射器和激光接收器,所述激光投射器发射与所述第一平面平行的线激光束,且相邻的两个所述激光投射器在所述第一平面上的视场范围至少相互连接。
5、可选地,所述激光投射器包括激光光源、准直单元和扩散单元,所述准直单元和所述扩散单元分别设置在所述激光光源的出射激光束的光路上;
6、所述准直单元用于至少在第一方向上准直所述出射激光束,所述扩散单元用于在第二方向上扩散所述出射激光束;
7、其中,所述第一方向与所述第一平面垂直,所述第二方向与所述第一平面平行。
8、可选地,所述准直单元包括柱面透镜,所述柱面透镜的轴向子午线沿所述第二方向延伸,屈光力子午线的延伸方向与所述第二方向垂直;所述激光光源位于所述柱面透镜的焦平面;所述扩散单元包括整形扩散片;
9、或者,所述准直单元包括准直透镜,所述准直透镜在垂直所述出射激光束的任意方向上准直所述出射激光束;所述扩散单元包括波浪镜和鲍威尔透镜中的任意一种。
10、可选地,所述激光光源包括激光芯片,所述扩散单元贴附于所述激光芯片的出光面上。
11、可选地,所述激光投射器包括激光光源和第一集成光束整形单元,所述第一集成光束整形单元设置在所述激光光源的出射激光束的光路上;
12、所述第一集成光束整形单元用于在第一方向上准直所述出射激光束,并在第二方向上扩散所述出射激光束;
13、其中,所述第一方向与所述第一平面垂直,所述第二方向与所述第一平面平行。
14、可选地,所述第一集成光束整形单元包括相互背离的第一表面和第二表面,所述第二表面位于所述第一表面远离所述激光光源的一侧;
15、所述第一表面用于在所述第一方向上准直所述出射激光束,所述第二表面用于在所述第二方向上扩散所述出射激光束;所述第一表面呈菲涅尔微结构面和微透镜阵列面中的一种,所述第二表面呈扩散微结构面;
16、或者,所述第一表面用于在垂直所述出射激光束的任意方向上准直所述出射激光束,所述第二表面用于在所述第二方向上扩散所述出射激光束;所述第一表面呈菲涅尔微结构面和微透镜阵列面中的一种,所述第二表面呈波浪面和屋脊面中的一种。
17、可选地,所述激光投射器包括激光光源、准直单元和第二集成光束整形单元,所述准直单元和所述第二集成光束整形单元分别设置在所述激光光源的出射激光束的光路上;
18、所述准直单元用于至少在第一方向上准直所述出射激光束,所述第二集成光束整形单元用于在第二方向上两次扩散所述出射激光束;
19、其中,所述第一方向与所述第一平面垂直,所述第二方向与所述第一平面平行。
20、可选地,所述第二集成光束整形单元包括相互背离的第三表面和第四表面,所述第四表面位于所述第三表面远离所述激光光源的一侧;
21、所述第三表面用于在所述第二方向上一级扩散所述出射激光束,所述第四表面用于在所述第二方向上二级扩散所述出射激光束;
22、所述准直单元包括准直透镜,所述准直透镜在垂直所述出射激光束的任意方向上准直所述出射激光束;所述第三表面呈波浪面或屋脊面,所述第四表面呈内凹柱面;
23、或者,所述准直单元包括柱面透镜,所述柱面透镜的轴向子午线沿所述第二方向延伸,屈光力子午线的延伸方向与所述第二方向垂直;所述激光光源位于所述柱面透镜的焦平面;所述第三表面呈扩散微结构面,所述第四表面呈内凹柱面。
24、可选地,所述准直单元为所述准直透镜;
25、所述激光投射器还包括望远镜单元,所述望远镜单元设置于所述激光光源的出射光束的光路上且位于所述准直透镜之后;
26、所述望远镜单元用于在所述第二方向上对所述出射激光束进行扩束。
27、可选地,所述激光投射器包括激光光源,所述激光光源包括垂直腔面发射激光器、边发射激光器、水平腔面发射激光器中的任意一种。
28、可选地,所述激光光源为垂直腔面发射激光器;
29、所述激光投射器包括至少一个线阵激光光源,所述线阵激光光源包括沿第一方向依次排列的多个激光器发光点,所述至少一个线阵激光光源沿第二方向依次排列;
30、其中,所述第一方向与所述第一平面垂直,所述第二方向与所述第一平面平行。
31、可选地,所述激光光源为水平腔面发射激光器;
32、所述激光投射器包括多个所述水平腔面发射激光器,多个所述水平腔面发射激光器沿第二方向依次排列;其中,所述第二方向与所述第一平面平行。
33、可选地,所述激光接收器包括成像芯片、滤光单元和成像透镜单元,所述滤光单元和所述成像透镜单元分别设置在所述成像芯片的接收光路上;
34、所述滤光单元用于过滤波长非所述激光投射器出射光线的至少部分光线,所述成像透镜单元用于将外部反射的所述激光投射器出射的光线形成的反射光成像在所述成像芯片上;
35、所述成像透镜单元的相对照度空间分布与所述激光投射器的光强空间分布趋势相反。
36、第二方面,本发明实施例还提供了一种移动机器人导航系统,包括第一方面任一所述的全景固态激光雷达。
37、本发明实施例提供了一种全景固态激光雷达和移动机器人导航系统,该全景固态激光雷达包括多个dtof模组,多个dtof模组设置于第一平面上且沿圆周依次排列,多个dtof模组的光轴分别朝向不同的径向方向,dtof模组包括激光投射器和激光接收器,激光投射器发射与第一平面平行的线激光束,且相邻的两个激光投射器在第一平面上的视场范围至少相互连接。本发明实施例在全景固态激光雷达中同时使用多个dtof模组,不需要设置机械旋转部件,提高了结构的稳定性,增加了整个全景固态激光雷达的使用寿命,并且不需要增加额外的电机带动dtof模组的旋转,有利于整个全景固态激光雷达的小型化设计,降低了生产成本,提高全景固态激光雷达输出的环境深度图像的帧率,通过图像拼接方式可以生成移动机器人周围360°全视场的环境距离信息,可以应用于有快速移动物体的导航场景,此外,采用直接飞行时间的测距原理,扩大了全景固态激光雷达的可精确测量范围,可以应用于远距离测量的导航场景。
- 还没有人留言评论。精彩留言会获得点赞!