一种核用水下机械手
1.本发明属于核电站水下机械手操作技术领域,具体涉及一种核用水下机械手。
背景技术:
2.核电站中有很多水下环境,水环境具有高放射性特点,人员无法进入。所以水下一些构件的检查修复或者防异物等工作均需要水下机械手进行操作,包括水中异物夹取与零件旋拧等相关操作。很多水下操作设备与机器人并不能配备所有功能的工具头,并不能满足水下众多项目与任务的需求,所以需要配备更多可快速更换的末端操作工具。
3.基于上述现状,有必要设计一款便携可靠的可快速更换的水下机械手。
技术实现要素:
4.本发明解决的技术问题为:核电站中有很多水下环境,若水中产生异物需要对异物进行打捞,打捞设备需要搭载机械手。本发明提供了一种可在水下以及强辐射环境中使用的机械手结构,且为模块化设计,可便携安装更换,具有很强的现场适应性,符合核电站装备方便更换维修快速安装等功能要求。
5.本发明采用的技术方案为:一种核用水下机械手,所述机械手包括转接筒1、密封接头2、转接筒压块3、后盖板4、夹爪电机5、夹爪电机安装筒6、夹爪小齿轮7、夹爪大齿轮8、第一轴承座9、旋转电机安装筒10、旋转电机11、旋转小齿轮12、旋转轴13、夹爪侧板14、夹爪15、第一连杆16、第二连杆17、第三连杆18、连杆座导向销19、连杆座20、密封圈压盖21、密封座22、第二轴承座23和夹爪推杆24;其中,转接筒1可搭载在其他水下设备上,旋转电机11带动旋转小齿轮12驱动旋转轴13带动夹爪机构旋转,调整机械手的的夹取姿态,夹爪电机5带动夹爪小齿轮7驱动夹爪大齿轮8转动从而通过夹爪推杆24驱动夹爪机构进行夹取和放松,机械手通过动静密封使电路和电机密封在腔体内,机械手可在水下使用;
6.所述的转接筒1为筒装结构,一端为螺纹机械接口用于机械手在其他设备上搭载,另一端有长条形的镂空走线口和半圆接口,转接筒1的半圆接口和转接筒压块3采用螺栓连接形式夹紧在后盖板4的尾座上,后盖板4的最后端和密封接头2连接用于出线密封;
7.所述的夹爪电机安装筒6主体结构为筒装结构,后端和后盖板4通过螺钉连接,连接面采用静密封处理,前端与第一轴承座9通过螺栓连接,连接面采用静密封处理,夹爪电机5安装在夹爪电机安装筒6内,夹爪电机5的输出轴上安装有夹爪小齿轮7;
8.所述的第一轴承座9后端与夹爪电机安装筒6连接,前端与旋转电机安装筒10通过螺栓连接,连接面采用静密封处理,夹爪大齿轮8后端有内齿轮结构前端为螺柱结构,中间部分为光轴通过轴承安装在第一轴承座9内,轴承两端采用台阶轴和弹簧挡圈固定,夹爪小齿轮7和夹爪大齿轮8的内螺纹形成啮合传动结构;
9.所述的旋转电机安装筒10后端与第一轴承座9连接,前端与第二轴承座23后端通过螺栓连接,连接面采用静密封处理,第二轴承座23前端与密封座22后端通过螺栓连接,连接面采用静密封处理,所述的旋转轴13一端有一个直径较大的圆盘,圆盘相对两侧各切掉
一部分,另一端输出直径较小的长轴,轴端有外齿轮结构,旋转轴13中心为中空结构,旋转轴13通过轴承固定安装在第二轴承座23内,轴承两端通过台阶轴和弹簧挡圈固定,所述的旋转电机11偏置的安装在旋转电机安装筒10内,旋转电机11输出轴上固定有旋转小齿轮12,旋转小齿轮12和旋转轴13的外齿轮形成啮合传动结构,旋转轴13和密封座22之间采用动密封结构进行密封;
10.所述的夹爪推杆24贯穿通过旋转轴13伸到旋转电机安装筒10内,夹爪推杆24深入旋转电机安装筒10的一端有内螺纹结构与夹爪大齿轮8的螺柱连接,夹爪推杆24与旋转轴13之间采用动密封结构进行密封,密封圈压盖21通过螺钉安装在旋转轴13大直径圆盘的外端面;
11.所述的两个夹爪侧板14通过螺钉安装在旋转轴13大直径圆盘的两个缺口处,两个侧板中心有两条凹槽,夹爪15与第一连杆16和两个第二连杆17形成连杆结构,第三连杆18一端与连杆结构连接另一端与连杆座20连接,连杆座20的另一端与夹爪推杆24的伸出端连接,连杆座20中心贯穿有连杆座导向销19,连杆座导向销19插入夹爪侧板14的凹槽中用于导向,通过连杆座20前后运动带动第三连杆18前后运动,从而驱动夹爪15产生夹紧和防松的动作。
12.本发明与现有技术相比优点在于:
13.(1)本发明具有可靠的密封结构,可在水下环境可靠应用;
14.(2)本发明具有在强辐射的环境中使用的特点;
15.(3)本发明为模块化设计,可便携搭载与更换,具有适应性强,操作维修快捷等优势。
附图说明
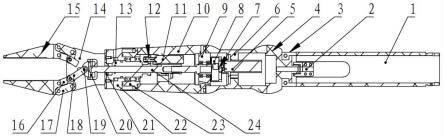
16.图1为本发明一种核用水下机械手轴侧图;
17.图2为本发明一种核用水下机械手剖视图;
18.其中:1.转接筒,2.密封接头,3.转接筒压块,4.后盖板,5.夹爪电机,6.夹爪电机安装筒,7.夹爪小齿轮,8.夹爪大齿轮,9.第一轴承座,10.旋转电机安装筒,11.旋转电机,12.旋转小齿轮,13.旋转轴,14.夹爪侧板,15.夹爪,16.第一连杆,17.第二连杆,18.第三连杆,19.连杆座导向销,20.连杆座,21.密封圈压盖,22.密封座,23.第二轴承座,24夹爪推杆。
具体实施方式
19.为了进一步解释本发明的技术方案,下面结合附图来对本发明进行详细阐述。
20.如图1至图2所示,一种核用水下机械手,所述机械手包括转接筒1、密封接头2、转接筒压块3、后盖板4、夹爪电机5、夹爪电机安装筒6、夹爪小齿轮7、夹爪大齿轮8、第一轴承座9、旋转电机安装筒10、旋转电机11、旋转小齿轮12、旋转轴13、夹爪侧板14、夹爪15、第一连杆16、第二连杆17、第三连杆18、连杆座导向销19、连杆座20、密封圈压盖21、密封座22、第二轴承座23和夹爪推杆24。其中,转接筒1可搭载在其他水下设备上,旋转电机11带动旋转小齿轮12驱动旋转轴13带动夹爪机构旋转,调整机械手的的夹取姿态。夹爪电机5带动夹爪小齿轮7驱动夹爪大齿轮8转动从而通过夹爪推杆24驱动夹爪机构进行夹取和放松。机械手
通过动静密封使电路和电机密封在腔体内,机械手可在水下使用。
21.所述的转接筒1为筒装结构,一端为螺纹机械接口用于机械手在其他设备上搭载,另一端有长条形的镂空走线口和半圆接口,转接筒1的半圆接口和转接筒压块3采用螺栓连接形式夹紧在后盖板4的尾座上。后盖板4的最后端和密封接头2连接用于出线密封。
22.所述的夹爪电机安装筒6主体结构为筒装结构,后端和后盖板4通过螺钉连接,连接面采用静密封处理,前端与第一轴承座9通过螺栓连接,连接面采用静密封处理。夹爪电机5安装在夹爪电机安装筒6内,夹爪电机5的输出轴上安装有夹爪小齿轮7。
23.所述的第一轴承座9后端与夹爪电机安装筒6连接,前端与旋转电机安装筒10通过螺栓连接,连接面采用静密封处理。夹爪大齿轮8后端有内齿轮结构前端为螺柱结构,中间部分为光轴通过轴承安装在第一轴承座9内,轴承两端采用台阶轴和弹簧挡圈固定,夹爪小齿轮7和夹爪大齿轮8的内螺纹形成啮合传动结构。
24.所述的旋转电机安装筒10后端与第一轴承座9连接,前端与第二轴承座23后端通过螺栓连接,连接面采用静密封处理。第二轴承座23前端与密封座22后端通过螺栓连接,连接面采用静密封处理。所述的旋转轴13一端有一个直径较大的圆盘,圆盘相对两侧各切掉一部分,另一端输出直径较小的长轴,轴端有外齿轮结构,旋转轴13中心为中空结构。旋转轴13通过轴承固定安装在第二轴承座23内,轴承两端通过台阶轴和弹簧挡圈固定。所述的旋转电机11偏置的安装在旋转电机安装筒10内,旋转电机11输出轴上固定有旋转小齿轮12,旋转小齿轮12和旋转轴13的外齿轮形成啮合传动结构。旋转轴13和密封座22之间采用动密封结构进行密封。
25.所述的夹爪推杆24贯穿通过旋转轴13伸到旋转电机安装筒10内,夹爪推杆24深入旋转电机安装筒10的一端有内螺纹结构与夹爪大齿轮8的螺柱连接。夹爪推杆24与旋转轴13之间采用动密封结构进行密封。密封圈压盖21通过螺钉安装在旋转轴13大直径圆盘的外端面。
26.所述的两个夹爪侧板14通过螺钉安装在旋转轴13大直径圆盘的两个缺口处,两个侧板中心有两条凹槽。夹爪15与第一连杆16和两个第二连杆17形成连杆结构,第三连杆18一端与连杆结构连接另一端与连杆座20连接,连杆座20的另一端与夹爪推杆24的伸出端连接,连杆座20中心贯穿有连杆座导向销19,连杆座导向销19插入夹爪侧板14的凹槽中用于导向,通过连杆座20前后运动带动第三连杆18前后运动,从而驱动夹爪15产生夹紧和防松的动作。
27.具体的实施过程如下:机械手通过转接筒1安装到机械手搭载的设备上,旋转电机11转动从而带动旋转小齿轮12与旋转轴13转动,从而带动夹爪15进行转动,用于调整机械手的位置,找到合适的工作位置;夹爪电机5转动从而带动夹爪小齿轮7与夹爪大齿轮8转动,夹爪大齿轮8与夹爪推杆24之间通过螺纹连接,夹爪大齿轮8转动带动夹爪推杆24产生轴向移动,从而带动连杆座20与第三连杆18相对于机械手前后移动,使夹爪15产生夹紧和防松动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1