一种全天候健康管理机器人的制作方法
1.本发明涉及健康管理机器人技术领域,尤其是涉及一种全天候健康管理机器人。
背景技术:
2.健康管理机器人一般是指具有语音交流功能、在线管家功能、视频询问功能、健康指标测量记录功能、提醒功能、互联网音影功能、自动规划路径移动功能等多合一的智能机器人。
3.健康管理机器人越来越多地应用到护理行业,全天候健康管理机器人概念的提出,主要是针对需要24小时不间断护理的应用场景,比如瘫痪患者、大型术后患者等完全没有自理能力的陪护场景。
4.在实际医护应用场景下,特别是多床位陪护场景下,为了同时应对多个陪护对象,设计人员需要在同一个场景下部署多个健康管理机器人来协同工作完成多个服务对象的陪护工作。
5.目前,现有的健康管理机器人都配备独立的无线指令接收及语音指令接收模块,在处理一些指令时,无线指令,比如遥控接收指令的模式可以通过设定对应的频率和加解密模块来实现与服务对象的绑定,而语音指令却做不到快速地进行绑定,一般需要服务对象进行语音特征录入才可实现。
6.然而,医护场景下的服务对象流动性较大,这种指令的采集模式不适用,且不能发挥多个健康管理机器人的协同工作能力。
技术实现要素:
7.为了解决现有技术中同一陪护场景下多个健康管理机器人协同陪护的指令收集及更优化的协同工作问题,本发明提供一种全天候健康管理机器人。采用如下的技术方案:一种全天候健康管理机器人,包括至少两台健康管理机器人本体和协作指令处理模块,所述健康管理机器人本体的主控电路板设有指令接收模块和指令交互模块,所述指令接收模块接收目标发出的无线指令数据和语音指令数据,所述指令交互模块接收指令接收模块的指令数据,并采集健康管理机器人本体的状态数据,所述状态数据包括是否处于陪护或充电状态、位置数据和电量数据,所述协作指令处理模块与健康管理机器人本体的主控电路板无线通信连接,接收指令交互模块的数据,并根据指令数据和状态数据控制健康管理机器人本体的执行动作。
8.通过上述技术方案,在具体的应用场景下,目标可以是多个待陪护的卧床病患者,一般设置的健康管理机器人本体的数量少于目标数量的三分之一,目标通过遥控或语音发出指令,在多目标的陪护场景下,一般采用遥控的方式进行指令,避免外界的语音干扰,且能更好地采集健康管理机器人本体与目标的距离数据;当其中目标发出陪护指令时,该指令一般是指吃药指令或互联网音影功能等,正常情况下所有的健康管理机器人本体主控电路板上设置的指令接收模块均接收到该指令,
此时指令并不立即执行,指令接收模块将该指令转化为数字指令信息后传输给指令交互模块,指令交互模块采集此时的各个健康管理机器人本体的状态数据,其中状态数据包括是否处于陪护或充电状态、位置数据和电量数据,指令交互模块再将指令数据和状态数据传输给协作指令处理模块,协作指令处理模块对状态数据进行综合研判,优选处于空闲状态且电量和位置数据均合适的健康管理机器人本体来执行目标发出陪护指令,解决了少量健康管理机器人本体全天候陪护多个目标的指令优化处理问题,大大减少了多目标陪护场景下的健康管理机器人本体的部署数量,大大减少了成本。
9.可选的,所述指令接收模块包括无线接收模块、语音识别模块和指令处理芯片,所述无线接收模块接收目标发出的无线指令数据,所述语音识别模块接收目标发出的指令语音,并转化为数字指令信号,所述指令处理芯片分别与无线接收模块和语音识别模块通信电连接,并形成数字指令信号传输给指令交互模块,指令处理芯片通过健康管理机器人本体的主控电路板向协作指令处理模块传输数据。
10.通过上述技术方案,无线接收模块可以接收目标发出的无线指令,这里的无线指令信息一般指遥控器或者手机等智能终端发出的指令,无线接收模块接收到指令后转化为数字指令信号,无线接收模块适用于陪护目标较多的应用场景下;同样的语音识别模块适用于陪护目标较少的应用场景下,语音识别模块接收目标发出的指令语音,并转化为数字指令信号;数字指令信号传输给指令处理芯片,通过健康管理机器人本体的主控电路板向协作指令处理模块传输该数字指令信号。
11.可选的,所述无线接收模块包括红外接收模块、蓝牙接收模块和无线wifi接收模块,所述红外接收模块、蓝牙接收模块和无线wifi接收模块分别与指令处理芯片通信电连接。
12.通过上述技术方案,红外接收模块、蓝牙接收模块和无线wifi接收模块的设置可以完成红外无线遥控器的指令接收,手机等智能终端的无线指令,同时可以采集指令发送目标的位置信息,并通过健康管理机器人本体的主控电路板自带的芯片进行直线距离计算。
13.可选的,所述指令交互模块是ai数据处理芯片。
14.通过上述技术方案,ai数据处理芯片可以高效地处理指令数据的处理,可实现高效地从健康管理机器人本体的状态采集。
15.可选的,所述协作指令处理模块包括壳体、无线收发模块和微处理器;所述壳体设置在目标所在场所的地理中心位置,所述无线收发模块和微处理器设置在壳体内,所述微处理器通过无线收发模块与健康管理机器人本体的主控电路板无线通信连接,接收指令交互模块传输的数据。
16.通过上述技术方案,将壳体设置在目标所在场所的地理中心位置,能更均匀的覆盖目标所在场景,无线收发模块可以实现无线接收主控电路板上设置的指令交互模块发送的数据,且可以无线向需要执行命令的健康管理机器人本体的主控电路板传输执行指令。
17.可选的,所述微处理器是gx8010芯片。
18.通过上述技术方案,gx8010芯是专为人工智能和物联网应用设计的嵌入式soc芯片,可以高效地进行指令集和数字信息的处理。
19.可选的,协作指令处理模块根据指令数据和状态数据控制健康管理机器人本体的执行动作的方法具体为:步骤1,将健康管理机器人本体进行标号,分别标记为,n是健康管理机器人本体的数量,代表任一健康管理机器人本体;将目标进行标号,分别标记为,m是目标的数量,代表任一目标;步骤2,目标发出新指令,记为order,所有健康管理机器人本体主控电路板上设置的指令接收模块接收到order,解析成指令数字串,并传输给指令交互模块,指令交互模块采集健康管理机器人本体的状态数据,若处于陪护状态记为nurse,若处于充电状态记为charging,若处于空闲状态记为free,并将此时处于空闲状态的健康管理机器人本体记为,b是处于空闲状态的健康管理机器人本体的数量,同时采集的电量数据,并记为,指令交互模块将状态数据和电量数据发送给协作指令处理模块;步骤3,设健康管理机器人本体的额定电量为p,协作指令处理模块判断状态数据为free,且电量大于50%p中与目标距离最近的健康管理机器人本体执行指令order,将该健康管理机器人本体记为,协作指令处理模块向的主控电路板发送执行命令order。
20.通过上述技术方案,在多目标的陪护场景下,由于各个健康管理机器人本体的状态不一,在接收到新的指令时,需要对健康管理机器人本体的状态进行判断,当前已经处于陪护状态或处于充电状态的健康管理机器人本体不适宜再次执行指令,对处于空闲状态的健康管理机器人本体再进行距离和电量的优选判断,整个判断过程由协作指令处理模块进行判断,效率高,基本在不超过1秒的时间内即可完成,目标并感受不到命令执行的滞后感。
21.若需要陪护的目标过多,当新的指令发出,没有合适的健康管理机器人本体能够执行该指令时,可进一步的放宽限制,比如将电量超过30%p的健康管理机器人本体也可执行指令,若还没有合适的健康管理机器人本体能够执行该指令,还可设置报警装置,提醒值班室的工作人员进行人工接入。
22.可选的,目标与之间的直线距离记为,其中与直线距离最小的记为,对应的健康管理机器人本体记为。
23.目标与之间的直线距离采用健康管理机器人本体的距离传感器或机器视觉系统测得。
24.通过上述技术方案,这个直线距离的采集可以使用现有的各类测距技术进行实现,比如距离传感器或机器视觉系统;例如可以在遥控器中内置激光发射器,在健康管理机器人本体内置激光接收器,通过激光信号的接收实现距离的判断,这个距离是指遥控器与健康管理机器人本体主控电路板之间的距离;若采用机器视觉系统判断距离,则这个距离是指健康管理机器人本体的摄像头与目标之间的距离,因为这个距离的精度要求并不是很高,因此机器视觉系统判断距离即可满足需求。
25.综上所述,本发明包括以下至少一种有益技术效果:
本发明能提供一种全天候健康管理机器人,采用独立的指令接收模块来多途径地采集陪护目标发出的指令,并将指令发送给指令交互模块,指令交互模块再采集健康管理机器人本体的实时状态,并根据是否处于陪护或充电状态、位置数据和电量数据的各种信息数据,协作指令处理模块对这些数据进行综合研判,最终指派最适合的健康管理机器人本体来执行目标发出的指令,解决了少量健康管理机器人本体全天候陪护多个目标的指令优化处理问题,大大减少了多目标陪护场景下的健康管理机器人本体的部署数量,大大减少了成本。
附图说明
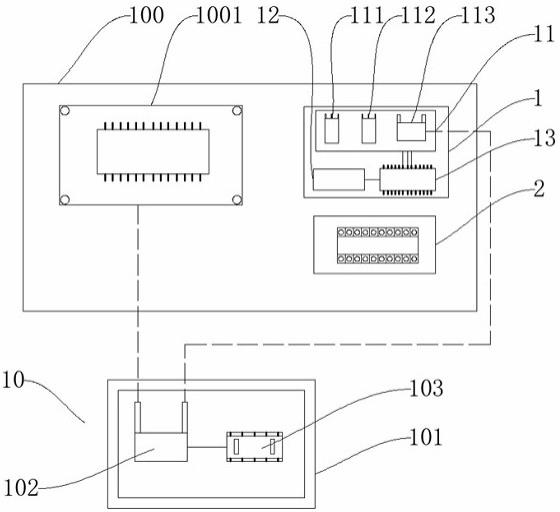
26.图1是本发明电器件连接原理示意图;图2是本发明协作指令处理模块根据指令数据和状态数据控制健康管理机器人本体的执行动作的方法流程示意图。
27.附图标记说明:1、指令接收模块;11、无线接收模块;111、红外接收模块;112、蓝牙接收模块;113、无线wifi接收模块;12、语音识别模块;13、指令处理芯片;2、指令交互模块;10、协作指令处理模块;101、壳体;102、无线收发模块;103、微处理器;100、健康管理机器人本体;1001、主控电路板。
具体实施方式
28.以下结合附图对本发明作进一步详细说明。
29.本发明实施例公开一种全天候健康管理机器人。
30.参照图1,一种全天候健康管理机器人,包括至少两台健康管理机器人本体100和协作指令处理模块10,健康管理机器人本体100的主控电路板1001设有指令接收模块1和指令交互模块2,指令接收模块1接收目标发出的无线指令数据和语音指令数据,指令交互模块2接收指令接收模块1的指令数据,并采集健康管理机器人本体100的状态数据,状态数据包括是否处于陪护或充电状态、位置数据和电量数据,协作指令处理模块10与健康管理机器人本体100的主控电路板1001无线通信连接,接收指令交互模块2的数据,并根据指令数据和状态数据控制健康管理机器人本体100的执行动作。
31.在具体的应用场景下,目标可以是多个待陪护的卧床病患者,一般设置的健康管理机器人本体100的数量少于目标数量的三分之一,目标通过遥控或语音发出指令,在多目标的陪护场景下,一般采用遥控的方式进行指令,避免外界的语音干扰,且能更好地采集健康管理机器人本体100与目标的距离数据;当其中目标发出陪护指令时,该指令一般是指吃药指令或互联网音影功能等,正常情况下所有的健康管理机器人本体100主控电路板1001上设置的指令接收模块1均接收到该指令,此时指令并不立即执行,指令接收模块1将该指令转化为数字指令信息后传输给指令交互模块2,指令交互模块2采集此时的各个健康管理机器人本体100的状态数据,其中状态数据包括是否处于陪护或充电状态、位置数据和电量数据,指令交互模块2再将指令数据和状态数据传输给协作指令处理模块10,协作指令处理模块10对状态数据进行综合研判,优选处于空闲状态且电量和位置数据均合适的健康管理机器人本体100来执行目标发出陪护指令,解决了少量健康管理机器人本体100全天候陪护多个目标的指令优化处理问
题,大大减少了多目标陪护场景下的健康管理机器人本体100的部署数量,大大减少了成本。
32.指令接收模块1包括无线接收模块11、语音识别模块12和指令处理芯片13,无线接收模块11接收目标发出的无线指令数据,语音识别模块12接收目标发出的指令语音,并转化为数字指令信号,指令处理芯片13分别与无线接收模块11和语音识别模块12通信电连接,并形成数字指令信号传输给指令交互模块2,指令处理芯片13通过健康管理机器人本体100的主控电路板1001向协作指令处理模块10传输数据。
33.无线接收模块11可以接收目标发出的无线指令,这里的无线指令信息一般指遥控器或者手机等智能终端发出的指令,无线接收模块11接收到指令后转化为数字指令信号,无线接收模块11适用于陪护目标较多的应用场景下;同样的语音识别模块12适用于陪护目标较少的应用场景下,语音识别模块12接收目标发出的指令语音,并转化为数字指令信号;数字指令信号传输给指令处理芯片13,通过健康管理机器人本体100的主控电路板1001向协作指令处理模块10传输该数字指令信号。
34.无线接收模块11包括红外接收模块111、蓝牙接收模块112和无线wifi接收模块113,红外接收模块111、蓝牙接收模块112和无线wifi接收模块113分别与指令处理芯片13通信电连接。
35.红外接收模块111、蓝牙接收模块112和无线wifi接收模块113的设置可以完成红外无线遥控器的指令接收,手机等智能终端的无线指令,同时可以采集指令发送目标的位置信息,并通过健康管理机器人本体100的主控电路板1001自带的芯片进行直线距离计算。
36.指令交互模块2是ai数据处理芯片。
37.ai数据处理芯片可以高效地处理指令数据的处理,可实现高效地从健康管理机器人本体100的状态采集。
38.协作指令处理模块10包括壳体101、无线收发模块102和微处理器103;壳体101设置在目标所在场所的地理中心位置,无线收发模块102和微处理器103设置在壳体101内,微处理器103通过无线收发模块102与健康管理机器人本体100的主控电路板1001无线通信连接,接收指令交互模块2传输的数据。
39.将壳体101设置在目标所在场所的地理中心位置,能更均匀的覆盖目标所在场景,无线收发模块102可以实现无线接收主控电路板1001上设置的指令交互模块2发送的数据,且可以无线向需要执行命令的健康管理机器人本体100的主控电路板1001传输执行指令。
40.微处理器103是gx8010芯片。
41.gx8010芯是专为人工智能和物联网应用设计的嵌入式soc芯片,可以高效地进行指令集和数字信息的处理。
42.参照图2,协作指令处理模块10根据指令数据和状态数据控制健康管理机器人本体100的执行动作的方法具体为:步骤1,将健康管理机器人本体100进行标号,分别标记为,n是健康管理机器人本体100的数量,代表任一健康管理机器人本体100;将目标进行标号,分别标记为,m是目标的数量,代表任一目标;
步骤2,目标发出新指令,记为order,所有健康管理机器人本体100主控电路板1001上设置的指令接收模块1接收到order,解析成指令数字串,并传输给指令交互模块2,指令交互模块2采集健康管理机器人本体100的状态数据,若处于陪护状态记为nurse,若处于充电状态记为charging,若处于空闲状态记为free,并将此时处于空闲状态的健康管理机器人本体100记为,b是处于空闲状态的健康管理机器人本体100的数量,同时采集的电量数据,并记为,指令交互模块2将状态数据和电量数据发送给协作指令处理模块10;步骤3,设健康管理机器人本体100的额定电量为p,协作指令处理模块10判断状态数据为free,且电量大于50%p中与目标距离最近的健康管理机器人本体100执行指令order,将该健康管理机器人本体100记为,协作指令处理模块10向的主控电路板1001发送执行命令order。
43.在多目标的陪护场景下,由于各个健康管理机器人本体100的状态不一,在接收到新的指令时,需要对健康管理机器人本体100的状态进行判断,当前已经处于陪护状态或处于充电状态的健康管理机器人本体100不适宜再次执行指令,对处于空闲状态的健康管理机器人本体100再进行距离和电量的优选判断,整个判断过程由协作指令处理模块10进行判断,效率高,基本在不超过1秒的时间内即可完成,目标并感受不到命令执行的滞后感。
44.若需要陪护的目标过多,当新的指令发出,没有合适的健康管理机器人本体100能够执行该指令时,可进一步的放宽限制,比如将电量超过30%p的健康管理机器人本体100也可执行指令,若还没有合适的健康管理机器人本体100能够执行该指令,还可设置报警装置,提醒值班室的工作人员进行人工接入。
45.目标与之间的直线距离记为,其中与直线距离最小的记为,对应的健康管理机器人本体100记为。
46.目标与之间的直线距离采用健康管理机器人本体100的距离传感器或机器视觉系统测得。
47.这个直线距离的采集可以使用现有的各类测距技术进行实现,比如距离传感器或机器视觉系统;例如可以在遥控器中内置激光发射器,在健康管理机器人本体100内置激光接收器,通过激光信号的接收实现距离的判断,这个距离是指遥控器与健康管理机器人本体100主控电路板1001之间的距离;若采用机器视觉系统判断距离,则这个距离是指健康管理机器人本体100的摄像头与目标之间的距离,因为这个距离的精度要求并不是很高,因此机器视觉系统判断距离即可满足需求。
48.本发明实施例一种全天候健康管理机器人的实施原理为:在某方舱隔离地点,为了减少医护人员与隔离人员的直接接触,采用健康管理机器人本体100来辅助进行全天候的陪护,该方舱设计隔离100人标准,对于隔离人员标记为,配备了20台健康管理机器人本体100,分别标记为;
在某时间点,目标需要互联网音影功能服务,按下了隔离床位上配备的遥控器,产生了指令order,order代表需要互联网音影功能服务,的主控电路板1001上设置的指令接收模块1均接收到order,解析成指令数字串,并传输给指令交互模块2,指令交互模块2采集健康管理机器人本体100的状态数据,得到、、、、这5台健康管理机器人本体100处于陪护状态,标记为nurse,、、、、、这6台处于充电状态,标记为charging;此时另外的9台若处于空闲状态,标记为free,并将此时处于空闲状态的健康管理机器人本体100记为,同时采集的电量数据,并记为,指令交互模块2将状态数据和电量数据发送给协作指令处理模块10;健康管理机器人本体100的额定电量为p,协作指令处理模块10判断状态数据为free,且电量大于50%p的健康管理机器人本体100有6台,其中与目标距离最近的健康管理机器人本体100为,对应的原始标记为,协作指令处理模块10向的主控电路板1001发送执行命令order,整个判断过程不超过1秒的时间,接收到order后,立即按照主控电路板1001规划的路径移动到目标附近,为目标提供互联网音影功能服务。
49.以上均为本发明的较佳实施例,并非以此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1