一种考虑水动力学影响的电动机械臂自适应鲁棒控制方法
本发明涉及了一种自适应鲁棒控制方法,具体涉及一种考虑水动力学影响的电动机械臂自适应鲁棒控制方法。
背景技术:
1、海洋蕴含丰富的自然资源,但是相较于陆地而言,海洋环境更加复杂多变。随着对海洋开发力度的不断加大,水下作业环境越来越恶劣,人类无法长期适应这种环境完成作业任务,所以需要借助水下机器人和水下机械臂代替人工完成执行作业任务。目前已有海上运维巡检,海底勘探,水下采样打捞等多方面的应用。然而,水下电动机械臂的研制主要集中在控制功能实现,控制方法也大多采用pid控制,未对机械臂的准确位移控制进行深入研究。此外,电动机械臂在水下作业过程中会受到水阻力和附加质量力等水阻力以及洋流等外干扰的影响,目前常用的pid控制方法难以适应这种复杂的作业环境,这就使得水下机械臂轨迹跟踪精度低,水下作业性能无法得到保障。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种考虑水动力学影响的水下电动机械臂自适应鲁棒控制方法。方法在考虑水动力学影响下保证整体闭环系统收敛性的同时采用参数在线自适应降低模型不确定性、水阻力和附加质量力以及水下外干扰因素的影响,在保证系统闭环系统稳定的同时,减小机械臂末端跟踪控制误差。
2、本发明采用的技术方案是:
3、本发明电动机械臂自适应鲁棒控制方法包括如下步骤:
4、步骤一:在考虑水动力学因素与模型不确定项和水下外干扰的情况下,建立水下电动机械臂的非线性动力学和水动力学模型;基于水下电动机械臂的非线性动力学和水动力学模型,使用自适应鲁棒控制法建立水下电动机械臂的自适应鲁棒控制器。
5、步骤二:将水下电动机械臂的各个关节的角度跟踪误差输入自适应鲁棒控制器中,采用梯度下降法进行自适应鲁棒控制器的参数估计矩阵的在线自适应迭代更新,更新完成后自适应鲁棒控制器输出自适应鲁棒控制律作为水下电动机械臂的各个关节的力矩,最终实现对水下电动机械臂的各个关节的角度的精准控制。
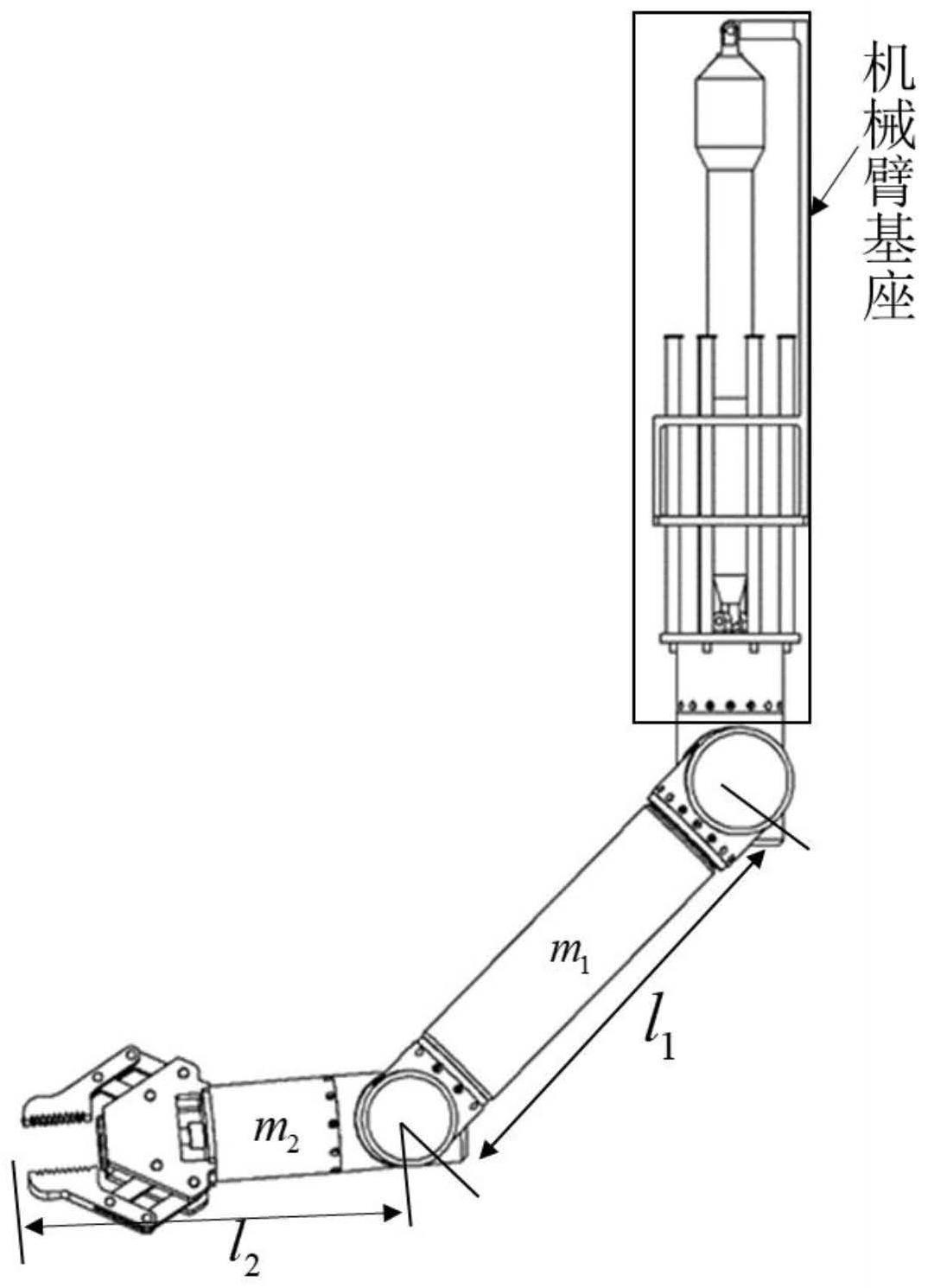
6、所述的步骤一中,水下电动机械臂具体为水下多自由度电动机械臂连杆机构,水下电动机械臂上共有n个自由度关节;建立的水下电动机械臂的非线性动力学和水动力学模型具体如下:
7、
8、其中,q、和分别为水下电动机械臂的各个自由度关节的角位移、角速度和角加速度,q=[q1 q2 … qn],q1 q2 … qn分别为水下电动机械臂的第1、2、…、n个自由度关节的角位移,分别为水下电动机械臂的第1、2、…、n个自由度关节的角速度,分别为水下电动机械臂的第1、2、…、n个自由度关节的角加速度;m'()为水下电动机械臂的加速度矩阵;c'()为水下电动机械臂的速度矩阵;dw()为水阻力矩阵;g为水下电动机械臂的重力矩阵;τ为水下电动机械臂的各个自由度关节的力矩;d为非线性动力学和水动力学模型的模型不确定项与水下外干扰,||d||≤dmax,dmax为非线性动力学和水动力学模型的模型不确定项与水下外干扰的最大值;模型不确定项具体为建模误差和模型参数不确定等;水下外干扰具体为水下环境,如洋流等的干扰;模型主要采用采用欧拉-拉格朗日法和morison公式进行建立。
9、所述的考虑的水动力学因素,即水下电动机械臂的水阻力和附加质量力矩阵t具体如下:
10、t=tm+tw
11、其中,tm为水下电动机械臂的附加质量力矩阵,tw为水下电动机械臂的水阻力矩阵,水阻力具体由水下电动机械臂在运动时的速度产生;主要考虑水阻力和附加质量力的影响采用morison公式对电动机械臂进行水动力学建模。
12、所述的水下电动机械臂的加速度矩阵m'()具体如下:
13、m’(q)=m(q)+hm(q)
14、其中,m()为水下电动机械臂的惯性矩阵,hm()为水下电动机械臂的附加质量的加速度矩阵,附加质量具体由水下电动机械臂在运动时的加速度产生。
15、所述的水下电动机械臂的速度矩阵c'()具体如下:
16、
17、其中,c()为科里奥利力和向心力矩阵,dm()为水下电动机械臂的附加质量的速度矩阵。
18、所述的水下电动机械臂的附加质量力矩阵tm具体如下:
19、
20、所述的水下电动机械臂的水阻力矩阵tw具体如下:
21、
22、所述的水下电动机械臂的附加质量力矩阵tm具体如下:
23、
24、所述的水下电动机械臂的水阻力矩阵td具体如下:
25、
26、所述的步骤一中,建立的水下电动机械臂的自适应鲁棒控制器具体如下:
27、τ=τa+τs
28、
29、τs=τs1+τs2
30、
31、τs1=-k1s
32、
33、其中,τ为自适应鲁棒控制律,即水下电动机械臂的各个自由度关节的控制力/力矩,τa为自适应模型补偿项,τs为鲁棒反馈项;为自适应模型补偿项中的参数估计矩阵,为参数估计矩阵的系数回归矩阵;τs1为鲁棒反馈项τs的线性鲁棒反馈项,τs2为鲁棒反馈项τs的非线性鲁棒反馈项;s为滑膜面;e为水下电动机械臂的各个自由度关节的关节角度跟踪误差,为水下电动机械臂的各个自由度关节的关节角度跟踪误差的一阶导;k1和k2分别为滑模面s和水下电动机械臂的各个自由度关节的关节角度跟踪误差e的增益矩阵;为自适应模型补偿项τa中的参数误差矩阵,θ为自适应模型补偿项τa中的参数矩阵;d为非线性动力学和水动力学模型的模型不确定项与水下外干扰;ε为自适应鲁棒控制器的补偿参数。
34、水下电动机械臂的各个自由度关节上均安装有编码器,编码器将各个自由度关节的实时角度传送给自适应鲁棒控制律。
35、所述的自适应模型补偿项τa中的参数矩阵θ具体如下:
36、
37、自适应模型补偿项的参数估计矩阵为参数矩阵θ的估计矩阵。
38、所述的水下电动机械臂的各个自由度关节的关节角度跟踪误差e具体如下:
39、e=q-qa
40、其中,qa为水下电动机械臂的各个自由度关节的期望角位移。
41、所述的参数估计矩阵的系数回归矩阵具体如下
42、
43、其中,为水下电动机械臂的各个自由度关节的期望角加速度。
44、所述的步骤二中,采用梯度下降法进行自适应鲁棒控制器的参数估计矩阵的在线自适应迭代更新,具体如下:
45、
46、
47、
48、
49、其中,为参数估计矩阵的微分;为参数估计矩阵的投影函数,γ为增益矩阵,ψ为自适应调整矩阵;θmax和θmin分别为参数矩阵θ的最大值和最小值;γ为自适应调整矩阵ψ中的参数矩阵;为参数估计矩阵的系数回归矩阵;为预设初始参数估计矩阵;t为自适应鲁棒控制器的采样频率。
50、所述的步骤二中,在线自适应迭代更新过程中,当水下电动机械臂的各个自由度关节的关节角度跟踪误差e不为0时,滑模面s也不等于0,在线自适应迭代更新不断进行,参数估计矩阵的微分进行不断更新,进而使得参数估计矩阵和参数自适应律τa进行不断更新,当水下电动机械臂的各个自由度关节的关节角度跟踪误差e达到最小时,即趋近于0时,此时参数自适应律τa趋于理想控制值,在线自适应迭代更新完成,更新完成后自适应鲁棒控制器输出自适应鲁棒控制律作为水下电动机械臂的各个关节的力矩,可以降低关节角度跟踪误差e,从而克服模型不确定项对控制效果带来的干扰,提高控制精度,最终实现精准控制。
51、本发明的有益效果是:
52、1、本发明模型充分考虑水下电动机械臂在水下作业时受到的水动力、模型不确定性以及水下外干扰因素的影响,克服了模型中参数不确定性造成的影响,在保证闭环稳定性的同时,降低了机械臂跟踪误差,提升了控制精度。
53、2、本发明方法使得机械臂在水下受到水阻力和附加质量力且存在不确定的外干扰的情况下,降低水下电动机械臂末端运动跟踪误差,保证控制系统稳定性的同时提高电动机械臂末端执行器控制精度从而提升水下电动机械臂水下作业性能。
- 还没有人留言评论。精彩留言会获得点赞!