除冰机器人的制作方法
本发明涉及一种除冰机器人,具体涉及一种除冰机器人。
背景技术:
1、输电线路包括杆塔、绝缘子串、输电线,相邻两个杆塔形成两个输电线吊点,绝缘子串一端与输电线吊点连接,另一端与输电线连接,这样就将输电线吊在了杆塔上。若绝缘子串是耐张绝缘子串,还需要通过连接线连接杆塔两端的输电线。为避免风舞对输电线的破坏,相邻两个输电线吊点之间的输电线为悬垂弧形,且在输电线吊点附近还安装有防风锤。除冰机器人工作时,一般需要沿输电线走行,因此,输电线吊点、防风锤处的越障作业影响着除冰机器人的使用方便度。
技术实现思路
1、本发明的目的是提供一种除冰机器人,以便于对输电线上障碍物的越障作业,降低安装难度。
2、本发明的技术方案是:
3、一种除冰机器人,包括机器人躯体、取电装置、除冰机构和破冰机构,所述机器人躯体包括前段脊柱和后段脊柱,所述破冰机构安装在所述前段脊柱上,形成前足,所述除冰机构安装在所述前段脊柱和所述后段脊柱的连接处,形成中足,所述取电装置安装在所述后段脊柱上,形成后足。
4、优选的,所述取电装置包括左臂和右臂,在所述左臂上设有第一导线组,在所述右臂上设有第二导线组,所述左臂与所述右臂合抱时围合形成用于与输电线间隙连接的输电线穿孔,且所述第一导线组和所述第二导线组相接形成螺旋导线。
5、优选的,所述破冰机构包括前足导轨、左钳臂、右钳臂、前足转动座、前足双头螺柱和前足正反转电机,所述前足双头螺柱绕y轴与所述前足转动座转动副连接,所述前足双头螺柱的正旋螺纹与所述左钳臂螺纹副连接,所述前足双头螺柱的反旋螺纹与所述右钳臂螺纹副连接,所述左钳臂、所述右钳臂分别与所述前足导轨在y轴方向上滑移副连接,所述前足正反转电机用于驱动所述前足双头螺柱相对于所述前足转动座转动。
6、进一步优选的,在所述左钳臂上设有第一内凹式弧形刃,在所述右钳臂上设有第二内凹式弧形刃,所述第一内凹式弧形刃垂直于所述第二内凹式弧形刃,且所述第一内凹式弧形刃与y轴的夹角为30°~60°。
7、优选的,所述除冰机构包括中足导轨、左轮座、右轮座、中足转动座、中足双头螺栓、中足正反转电机和走行电机,所述中足双头螺柱绕y轴与所述中足转动座转动副连接,所述中足双头螺柱的正旋螺纹与所述左轮座螺纹副连接,所述中足双头螺柱的反旋螺纹与所述右轮座螺纹副连接,所述左轮座、所述右轮座分别与所述中足导轨在y轴方向上滑移副连接,所述中足正反转电机用于驱动所述中足双头螺柱相对于所述中足转动座转动,所述左轮座上安装有绕z轴转动的左走行轮,所述右轮座上安装有绕z轴转动的右走行轮,所述走行电机用于驱动所述左走行轮或所述右走行轮转动。
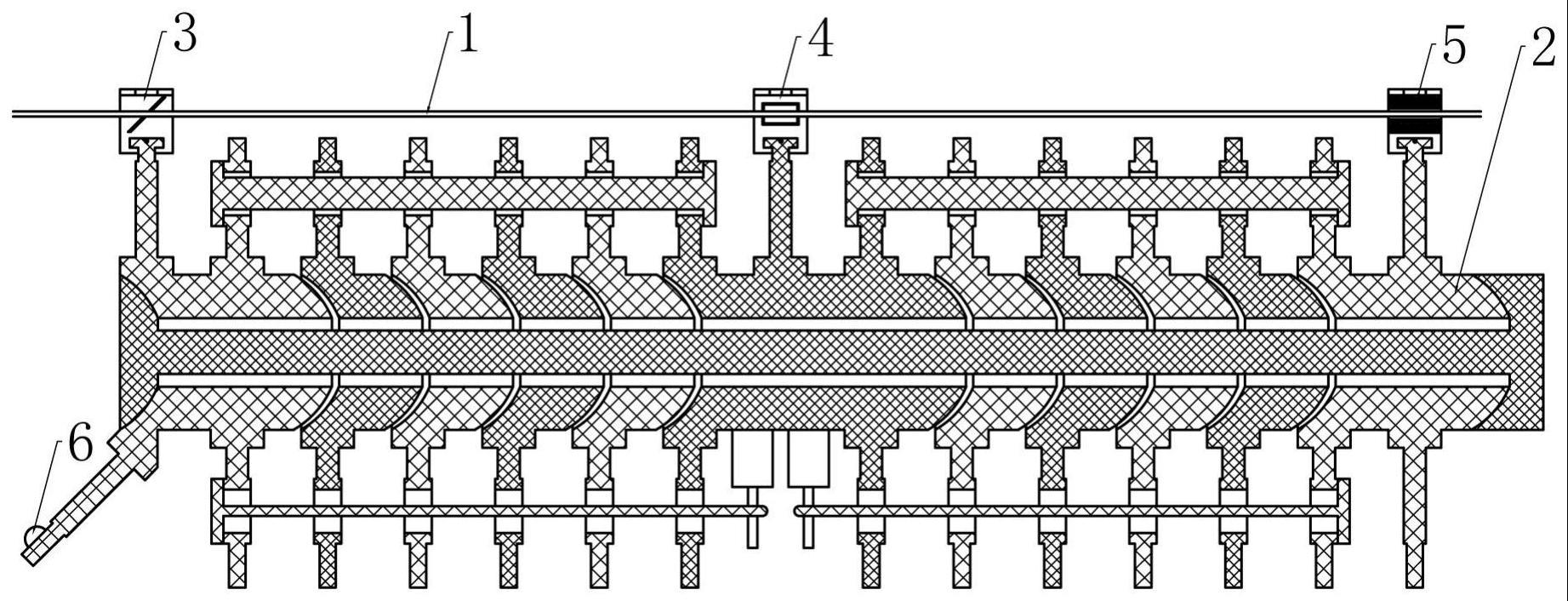
8、优选的,所述机器人躯体包括复位筋、牵拉筋、牵拉筋收放机构和多个脊锥骨,所述脊锥骨包括骨盘,在所述骨盘的一侧设有关节球,在所述骨盘的另一侧设有关节槽,在所述骨盘的中心设有贯穿所述关节球和所述关节槽的中心孔,在所述骨盘上以所述中心孔为中心环形阵列设置有2n(n≥3)个边孔,所述复位筋、所述牵拉筋间隔设置在所述2n个边孔内,所述牵拉筋收放机构用于收放牵拉筋,在收紧所述牵拉筋时,所述机器人躯体向被收紧的牵拉筋一侧弯曲,在放回所述牵拉筋时,所述机构人躯体恢复伸直状态。
9、优选的,还包括安装在所述前段脊柱端部的前目摄像头。
10、本发明的有益效果是:
11、1.本发明的除冰机器人,机器人包括前足、中足和后足,这样,中足与后足可以实现机器人挂在输电线上的,通过调整前段脊柱而使前足攀附在连接线上,实现前足对输电线吊点的越障,然后在保持前足和后足挂在输电线上的同时,使中足与输电线脱离,实现中足对输电线吊点的越障,最后在保持前足和中足挂在输电线上的同时,使后足与输电线脱离,实现后足对输电线吊点的越障。为实现前述动作,机器人躯体必须分成前段脊柱和后段脊柱,这样,与整段脊柱相比,才可以实现前段脊柱与后段脊柱的不同弧度控制。将破冰机构形成前足,考虑到覆冰较厚时,借助破冰机构对冰壳的钳夹压裂,便于中足的除冰机构更有效的脱除输电线上的覆冰,将取电装置形成后足,考虑到了除冰作业后输电线的线径是较为一致的,取电装置的内径不需根据覆冰厚度而作适应性调整。综上,本发明的除冰机器人,攀附输电线并越障的效果好,操作方便。破冰机构和除冰机构相配合,除冰效果好。破冰机构、除冰机构和取电装置既可以实现相应功能,又可以充当前足、中足和后足,结构简单。
12、2.本发明的除冰机器人,取电装置包括左臂和右臂,在左臂上设有第一导线组,在右臂上设有第二导线组,左臂与所述右臂合抱时围合形成用于与输电线间隙连接的输电线穿孔,且所述第一导线组和所述第二导线组相接形成螺旋导线。这样,既可以实现取电作业,又能实现对输电线的合抱,形在后足,结构简单,位置设置合理。
13、3.本发明的除冰机器人,破冰机构包括前足导轨、左钳臂、右钳臂、前足转动座、前足双头螺柱和前足正反转电机,通过前足正反转电机驱动前足双头螺柱,实现对左臂和右臂相对位置的调整,当左臂和右臂间隙能够透过输电线时,可以实现前足对输电线上障碍的跨越。当左臂与右臂间隙等于输电线外径时,可以实现对输电线上覆冰的夹持破裂,以便于除冰机构的除冰作业。
14、4.本发明的除冰机器人,在所述左钳臂上设有第一内凹式弧形刃,在所述右钳臂上设有第二内凹式弧形刃,所述第一内凹式弧形刃垂直于所述第二内凹式弧形刃,且所述第一内凹式弧形刃与y轴的夹角为30°~60°,这样,夹持覆冰时摩擦力更大,不易滑动。
15、5.本发明的除冰机器人,所述除冰机构包括中足导轨、左轮座、右轮座、中足转动座、中足双头螺栓、中足正反转电机和走行电机,通过中足正反转电机驱动中足双头螺柱,实现对左轮座和右轮座相对位置的调整,当左轮座和右轮座间隙能够透过输电线时,可以实现前足对输电线上障碍的跨越。当左轮座和右轮座间隙等于输电线外径时,可以实现对输电线上覆冰的夹持,走行电机驱动左走行轮或右走行轮转动时,可以实现中足相对于输电线的移动,实现除冰机器人的前进。
16、6.本发明的除冰机器人,所述机器人躯体包括复位筋、牵拉筋、牵拉筋收放机构和多个脊锥骨,所述脊锥骨包括骨盘,在所述骨盘的一侧设有关节球,在所述骨盘的另一侧设有关节槽,在所述滑盘的中心设有贯穿所述关节球和所述关节槽的中心孔,在所述骨盘上以所述中心孔为中心环形阵列设置有2n(n≥3)个边孔,所述复位筋、所述牵拉筋间隔设置在所述2n个边孔内,所述牵拉筋收放机构用于收放牵拉筋,在收紧所述牵拉筋时,所述机器人躯体向被收紧的牵拉筋一侧弯曲,在放回所述牵拉筋时,所述机构人躯体恢复伸直状态。这样,可以实现对前段脊柱或后段脊柱的曲度的调整,实现对两段不同曲度的输电线的攀附跨越。
17、7.本发明的除冰机器人,还包括安装在所述前段脊柱端部的前目摄像头,这样,既可以实现对输电线走向的寻找,也可以在除冰过程中对输电线进行巡线作业。
技术特征:
1.一种除冰机器人,其特征在于,包括机器人躯体、取电装置、除冰机构和破冰机构,所述机器人躯体包括前段脊柱和后段脊柱,所述破冰机构安装在所述前段脊柱上,形成前足,所述除冰机构安装在所述前段脊柱和所述后段脊柱的连接处,形成中足,所述取电装置安装在所述后段脊柱上,形成后足。
2.如权利要求1所述的除冰机器人,其特征在于,所述取电装置包括左臂和右臂,在所述左臂上设有第一导线组,在所述右臂上设有第二导线组,所述左臂与所述右臂合抱时围合形成用于与输电线间隙连接的输电线穿孔,且所述第一导线组和所述第二导线组相接形成螺旋导线。
3.如权利要求1所述的除冰机器人,其特征在于,所述破冰机构包括前足导轨、左钳臂、右钳臂、前足转动座、前足双头螺柱和前足正反转电机,所述前足双头螺柱绕y轴与所述前足转动座转动副连接,所述前足双头螺柱的正旋螺纹与所述左钳臂螺纹副连接,所述前足双头螺柱的反旋螺纹与所述右钳臂螺纹副连接,所述左钳臂、所述右钳臂分别与所述前足导轨在y轴方向上滑移副连接,所述前足正反转电机用于驱动所述前足双头螺柱相对于所述前足转动座转动。
4.如权利要求3所述的除冰机器人,其特征在于,在所述左钳臂上设有第一内凹式弧形刃,在所述右钳臂上设有第二内凹式弧形刃,所述第一内凹式弧形刃垂直于所述第二内凹式弧形刃,且所述第一内凹式弧形刃与y轴的夹角为30°~60°。
5.如权利要求1所述的除冰机器人,其特征在于,所述除冰机构包括中足导轨、左轮座、右轮座、中足转动座、中足双头螺栓、中足正反转电机和走行电机,所述中足双头螺柱绕y轴与所述中足转动座转动副连接,所述中足双头螺柱的正旋螺纹与所述左轮座螺纹副连接,所述中足双头螺柱的反旋螺纹与所述右轮座螺纹副连接,所述左轮座、所述右轮座分别与所述中足导轨在y轴方向上滑移副连接,所述中足正反转电机用于驱动所述中足双头螺柱相对于所述中足转动座转动,所述左轮座上安装有绕z轴转动的左走行轮,所述右轮座上安装有绕z轴转动的右走行轮,所述走行电机用于驱动所述左走行轮或所述右走行轮转动。
6.如权利要求1所述的除冰机器人,其特征在于,所述机器人躯体包括复位筋、牵拉筋、牵拉筋收放机构和多个脊锥骨,所述脊锥骨包括骨盘,在所述骨盘的一侧设有关节球,在所述骨盘的另一侧设有关节槽,在所述骨盘的中心设有贯穿所述关节球和所述关节槽的中心孔,在所述骨盘上以所述中心孔为中心环形阵列设置有2n(n≥3)个边孔,所述复位筋、所述牵拉筋间隔设置在所述2n个边孔内,所述牵拉筋收放机构用于收放牵拉筋,在收紧所述牵拉筋时,所述机器人躯体向被收紧的牵拉筋一侧弯曲,在放回所述牵拉筋时,所述机构人躯体恢复伸直状态。
7.如权利要求1所述的除冰机器人,其特征在于,还包括安装在所述前段脊柱端部的前目摄像头。
技术总结
本发明涉及一种除冰机器人,包括机器人躯体、取电装置、除冰机构和破冰机构,所述机器人躯体包括前段脊柱和后段脊柱,所述破冰机构安装在所述前段脊柱上,形成前足,所述除冰机构安装在所述前段脊柱和所述后段脊柱的连接处,形成中足,所述取电装置安装在所述后段脊柱上,形成后足。本发明的除冰机器人,攀附输电线并越障的效果好,操作方便。破冰机构和除冰机构相配合,除冰效果好。破冰机构、除冰机构和取电装置既可以实现相应功能,又可以充当前足、中足和后足,结构简单。
技术研发人员:常悦,李云生,杜楠,全晓
受保护的技术使用者:国网河南省电力公司南阳供电公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!