一种智能机器人手臂的制作方法
1.本实用新型属于智能机器技术领域,具体为一种智能机器人手臂。
背景技术:
2.机器人系统是由视觉传感器、机械臂系统及主控计算机组成,其中机械臂系统又包括模块化机械臂和灵巧手两部分,整个系统的构建模型,可以用在焊接,搬运,涂装,运输,氩弧焊接,电焊、包装堆码,提高工作效率,降低用人成本,减速劳动力。
3.其中,经检索发现,有一篇专利号为cn201721573726.x一种机器人手臂结构,该种机器人手臂结构,能够精确的控制电机转动的角度;降低使用成本,便于对手臂进行调整,适应于多种需求,结构简单,便于使用的效果;其中,不足点如下:
4.现有的装置在使用过程中虽然可以对手臂进行调整,但是在使用过程中,无法对灵活手部位进行拆卸安装,导致灵活手处无法进行更换,同时该装置在对抓手的夹持角度进行调节时较为繁琐,容易造成抓手的损坏。
技术实现要素:
5.本实用新型的目的在于:为了解决上述的问题,提供一种智能机器人手臂。
6.本实用新型采用的技术方案如下:一种智能机器人手臂,包括机械大臂、活动臂和机械小臂,所述机械大臂一侧配套设置有活动臂,所述活动臂一侧活动设置有机械小臂,所述活动臂一侧设置有安装机构和活动机构;
7.所述安装机构包括:微型电机、连接件、凹槽、滑槽、滑块、固定弧板、凸块、紧固螺栓和固定螺栓;
8.所述活动臂一侧固定安装有微型电机,所述微型电机通过其自身设置的输出轴安装有连接件,所述连接件侧面嵌入设置有凹槽,同时凹槽间隔设置有若干。
9.优选的:所述机械小臂一侧嵌入设置有滑槽,所述滑槽内部滑动设置有滑块,所述滑块一侧固定安装有固定弧板,所述固定弧板外部固定安装有凸块,所述机械小臂一侧靠近滑槽螺纹连接有紧固螺栓,所述机械小臂一侧靠近紧固螺栓下方螺纹连接有固定螺栓,同时凸块与凹槽呈活动契合设置。
10.优选的:安装块、嵌入槽、活动块、固定板、齿条、气缸、传动件、固定件、调节齿轮和夹头,所述机械小臂一侧固定安装有安装块,所述安装块内部两侧均嵌入设置有嵌入槽,所述嵌入槽内部均活动设置有活动块,所述活动块上方固定安装有固定板,所述固定板一侧均固定安装有齿条,所述机械小臂侧面固定安装有气缸,且气缸的输出轴通过连接杆与活动块进行连接,所述安装块两侧均通过转轴安装有传动件,所述传动件一侧固定安装有固定件,所述固定件侧面嵌套设置有调节齿轮,所述传动件一端固定安装有夹头,同时调节齿轮与齿条之间呈契合设置。
11.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
12.1、本实用新型中,通过设置连接件、凹槽、滑槽、滑块、固定弧板、凸块、紧固螺栓和
固定螺栓,可以便捷的对机械小臂进行更换,进而对夹持抓手的部位进行更换,当机械小臂发生损坏时,只需对机械小臂进行更换无需对整个机械手臂进行更换,进而减少智能机器人在使用时的成本,提高装置在使用时的实用性。
13.2、本实用新型中,通过设置安装块、嵌入槽、活动块、固定板、齿条、气缸、传动件、固定件、调节齿轮和夹头,可以对夹头的夹持角度进行更加便捷的调节,进而提高装置在使用时的利用率,同时利用上述结构可以使整个机械手臂在使用时更加灵活,便于对所需货物进行夹持,减少工作人员的劳动量,提高工作效率,降低用人成本。
附图说明
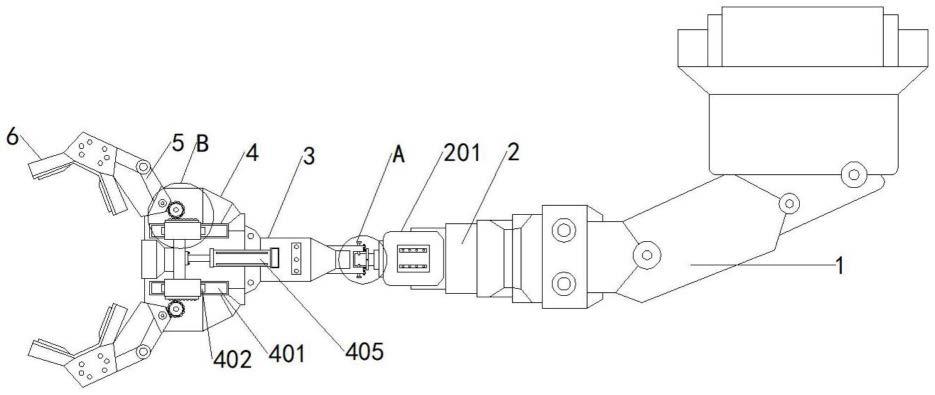
14.图1为本实用新型的整体正面结构示意简图;
15.图2为本实用新型中图1的a处放大结构示意简图;
16.图3为本实用新型中图1的b处放大结构示意简图;
17.图4为本实用新型中固定弧板侧面结构示意简图。
18.图中标记:1、机械大臂;2、活动臂;201、微型电机;202、连接件;203、凹槽;3、机械小臂;301、滑槽;302、滑块;303、固定弧板;3031、凸块;304、紧固螺栓;305、固定螺栓;4、安装块;401、嵌入槽;402、活动块;403、固定板;404、齿条;405、气缸;5、传动件;501、固定件;502、调节齿轮;6、夹头。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.本实用新型中:
21.参照图1-4,一种智能机器人手臂,包括机械大臂1、活动臂2和机械小臂3,机械大臂1一侧配套设置有活动臂2,活动臂2一侧活动设置有机械小臂3,活动臂2一侧设置有安装机构和活动机构;
22.安装机构包括:微型电机201、连接件202、凹槽203、滑槽301、滑块302、固定弧板303、凸块3031、紧固螺栓304和固定螺栓305;
23.活动臂2一侧固定安装有微型电机201,微型电机201通过其自身设置的输出轴安装有连接件202,连接件202侧面嵌入设置有凹槽203,同时凹槽203间隔设置有若干。
24.参照图1、2、3,本实施例中,机械小臂3一侧嵌入设置有滑槽301,滑槽301内部滑动设置有滑块302,滑块302一侧固定安装有固定弧板303,固定弧板303外部固定安装有凸块3031,机械小臂3一侧靠近滑槽301螺纹连接有紧固螺栓304,机械小臂3一侧靠近紧固螺栓304下方螺纹连接有固定螺栓305,同时凸块3031与凹槽203呈活动契合设置,可以便捷的对机械小臂3进行安装和拆卸。
25.参照图1、4,本实施例中,活动机构包括:安装块4、嵌入槽401、活动块402、固定板403、齿条404、气缸405、传动件5、固定件501、调节齿轮502和夹头6。
26.参照图1、4,本实施例中,机械小臂3一侧固定安装有安装块4,安装块4内部两侧均
嵌入设置有嵌入槽401,嵌入槽401内部均活动设置有活动块402,活动块402上方固定安装有固定板403,固定板403一侧均固定安装有齿条404,机械小臂3侧面固定安装有气缸405,且气缸405的输出轴通过连接杆与活动块402进行连接,利用气缸405对固定板403进行移动,进而使齿条404进行移动。
27.参照图1、4,本实施例中,安装块4两侧均通过转轴安装有传动件5,传动件5一侧固定安装有固定件501,固定件501侧面嵌套设置有调节齿轮502,传动件5一端固定安装有夹头6,同时调节齿轮502与齿条404之间呈契合设置,可以对夹头6的夹持角度进行调节。
28.参照图1,本实施例中,气缸405与外部气泵相连接,且气泵与微型电机201均通过导线与智能机器人内部的蓄电池相连接,且均设置有与之相匹配的控制面板。
29.工作原理:在使用本实用新型提供的一种智能机器人手臂时,首先工作人员将机械小臂3一侧嵌套在连接件202外部,然后转动紧固螺栓304进而使滑槽301内部设置的滑块302进行移动,当滑块302移动时固定弧板303向连接件202处靠近,进而使固定弧板303内侧设置的凸块3031嵌入至凹槽203内部,嵌入完成后利用固定螺栓305再次对机械小臂3进行固定,当需要对货物进行夹持时,可以利用微型电机201驱动机械小臂3进行转动,进而调节夹持的方向,同时开启气缸405使其拉动活动块402进行上下移动,进而使活动块402上方设置的固定板403进行移动,当固定板403进行移动利用齿条404对调节齿轮502进行驱动,当调节齿轮502转动时传动件5同时进行开合,进而利用传动件5一侧设置的夹头6对货物进行夹持。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1