一种非接触式防夹电容感应尾门系统的制作方法
1.本实用新型涉及汽车尾门领域,特别涉及一种非接触式防夹电容感应尾门系统。
背景技术:
2.随着近年家用车市场大大被拓展,消费者对于车辆配置的需求约来越高,电动后尾门系统也越来越多的普及到不同档次的车辆中。目前电动尾门系统一般通过撑杆电机运动时发出的霍尔位置信号来判断尾门位置和运动状态,并实现防夹功能,当运动方向有物体阻碍尾门运动时,尾门接触阻碍物产生阻力,阻力超过标定阈值时触发防夹并停止运动。原有方案缺点在于,需要接触到物体并产生一定压力时才触发防夹,如果阻碍物是人,当人体阻碍尾门运动并产生防夹,此时会造成人一定的不舒适感。
技术实现要素:
3.为了实现上述目的,本实用新型所采用的技术方案是:
4.一种非接触式防夹电容感应尾门系统,包括:车身、尾门、撑杆电机和尾门控制模块,还包括:
5.设置在所述尾门下部至少一第一感应天线、至少一第二感应天线和检测模块组成,所述第一感应天线和所述第二感应天线成对的布置在所述尾门的下部,第一感应天线和第二感应天线一端与所述检测模块和尾门控制模块相连,通过感应环境电场进而对所述尾门控制模块输出信号;
6.所述感应机构通过向所述尾门控制模块输出信号,控制所述撑杆电机,举升或放下所述尾门,进而使尾门相对于所述车身完成开合工作。
7.在本实用新型的一个优选实施例中,所述检测模块以电路的形式集成于所述尾门控制模块内。
8.在本实用新型的一个优选实施例中,所述检测模块与所述尾门控制模块分离外置,通过通讯线与尾门控制模块相连。
9.在本实用新型的一个优选实施例中,所述尾门控制模块分别与左撑杆电机、右撑杆电机、霍尔传感模块和电源相连。
10.在本实用新型的一个优选实施例中,所述尾门控制模块还与can总线、汽车总电箱、解锁电机、报警器相连。
11.本实用新型的有益效果在于:
12.本实用新型所提供的一种非接触式防夹电容感应尾门系统,利用电容感应检测原理,在尾门边缘布置感应天线,在运动时不断监控环境电容变化,当运动过程中尾门附近出现阻碍物(如人体)并改变了附近场电容值,超过电容标定阈值,此时尾门停止并报警,避免了接触人体造成的不适感,增加了用户体验。
附图说明
13.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
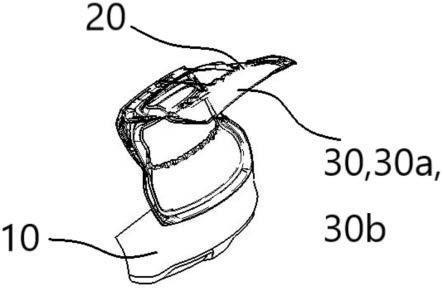
14.图1是本实用新型的尾门感应机构布置结构图。
15.图2是本实用新型的尾门感应示意图一。
16.图3是本实用新型的尾门感应示意图二。
17.图4是本实用新型的实施例一的电路原理图。
18.图5是本实用新型的实施例二的电路原理图。
19.图6是本实用新型的尾门执行打开动作的系统流程图。
20.图7是本实用新型的尾门执行关闭动作的系统流程图。
具体实施方式
21.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.以下结合附图和具体实施方式对本实用新型的详细结构作进一步描述。
23.参考图1的一种非接触式防夹电容感应尾门系统,包括:车身10、尾门 20、撑杆电机32和尾门控制模块100。第一感应天线30a和第二感应天线30b 设置在尾门20的下部,第一感应天线30a和第二感应天线30b与检测模块30c 和尾门控制模块100相连,通过感应环境电场进而对尾门控制模块100输出信号,控制撑杆电机130,举升或放下尾门20,进而使尾门20相对于车身10 完成开合工作。
24.参考图2和图3,第一感应天线30a、第二感应天线30b和检测模块30c 共同组成了感应机构。第一感应天线30a和第二感应天线30b成对的布置在尾门20下部的左侧、右侧或下侧边部。撑杆电机32设置在尾门20和车身10 之间。第一感应天线30和第二感应天线30b在电容感应的原理下,提供一定的电容检测范围31。当物体40(或人体)处在电容检测范围31内时,检测模块30c通过第一感应天线30a和第二感应天线30b检测环境电容变化,并向系统单片机发送信号。
25.参考图4和图5,尾门控制模块100分别与解锁电机101、吸合电机102、左撑杆电机103、霍尔传感模块104、右撑杆电机105、报警器106、检测模块30c、汽车总电箱107、接触式防夹传感器108、can总线109和电源110 相连。左撑杆电机103和右撑杆电机105组成了撑杆电机32。检测模块30c 通过感应第一感应天线30a和第二感应天线30b间的电压差后向尾门控制模块30c发送信号,尾门控制模块100紧急停止左撑杆电机103和右撑杆电机 105工作。接触式防夹传感器108则通过感知尾门20运动是否受到超过阈值的阻力,进而发送急停信号给尾门控制模块100。霍尔传感器104在尾门20 的运动过程中,通过感应左撑杆点击103和右撑杆电机105所在位置并实时反馈给尾门控制模块100。当尾门控制模块100控制尾门20急停时,还会通过报警器106以蜂鸣的形式发出警告信号音。尾门控制模块100通过can总线109向系统单片机实时反馈实施工况。
26.本实用新型的另一种实施方式中,检测模块30c还可以以电路的形式集成于尾门
控制模块100内。
27.参考图7,当尾门20从完全关闭状态执行打开动作时,车身10、尾门20、撑杆电机32、尾门控制模块100、第一感应天线30a、第二感应天线30b、解锁电机101和吸合电机102间执行以下控制逻辑:
28.s10:尾门控制模块100检测是否收到系统单片机开门指令。
29.s11:若收到系统单片机开锁指令,尾门控制模块100控制解锁电机101 对尾门20进行解锁。
30.s12:检测模块30c开始持续通过第一感应天线30a和第二感应天线30b 检测环境电容变化。
31.s13:若检测模块30c未检测到环境电容变化,则尾门控制模块100会继而允许撑杆电机32执行尾门20举升动作。
32.s14:检测模块30c继续检测环境电容是否发生变化。若环境电容发生变化,则跳至s18系统单片机向尾门控制模块100发送信号进而停止撑杆电机 32运动。
33.s15:接触式防夹传感器108感应是否有物体直接阻挡尾门20运动。若感应到有物体阻挡,则跳至s18系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
34.s16:尾门控制模块100根据自身计数判断尾门20运动是否超时。若超时,则跳至s18系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
35.s17:尾门控制模块100判断根据霍尔传感模块104判断尾门20是否运动至指定开启/停止位置。若已运动到指定位置,则跳至s18系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
36.s18:系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
37.当尾门20从打开状态执行关闭动作时,车身10、尾门20、撑杆电机32、尾门控制模块100、第一感应天线30a、第二感应天线30b、解锁电机101和吸合电机102间执行以下控制逻辑:
38.s20:尾门控制模块100检测是否收到系统单片机关门指令。
39.s21:若收到关门指令,则检测模块30c开始持续通过第一感应天线30a 和第二感应天线30b检测环境电容变化。
40.s22:若检测模块30c未检测到环境电容变化,则尾门控制模块100会继而允许撑杆电机32执行尾门20关闭动作。
41.s23:检测模块30c继续检测环境电容是否发生变化。若环境电容发生变化,则跳至s26系统单片机向尾门控制模块100发送信号进而停止撑杆电机 32运动。
42.s24:接触式防夹传感器108感应是否有物体直接阻挡尾门20运动。若感应到有物体阻挡,则跳至s26系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
43.s25:尾门控制模块100根据自身计数判断尾门20运动是否超时。若超时,则跳至s26系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
44.s26:系统单片机向尾门控制模块100发送信号进而停止撑杆电机32运动。
45.s27:尾门控制模块100判断根据霍尔传感模块104判断尾门20是否运动至指定闭锁位置。
46.s28:若尾门20运动至闭锁位置,则系统单片机向尾门控制模块100发送信号进而
停止撑杆电机32运动。
47.s29:尾门控制模块100控制吸合电机102对尾门20进行吸附至关闭状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1