一种移动式服务机器人的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种移动式服务机器人。
背景技术:
2.近年来随着各种材料技术、传感器、控制技术以及编程开发技术的进步,很多公司都在开发半自主或全自主工作的服务机器人,更好的服务人类的各种日常生活和工作。
3.现有的服务型机器人在市场上非常缺少,且价格较为昂贵,很多开发者往往由于机器人的制备成本而放弃开发。
技术实现要素:
4.本实用新型的目的就在于为了解决上述问题而提供一种结构简单,设计合理的移动式服务机器人。
5.本实用新型通过以下技术方案来实现上述目的:
6.一种移动式服务机器人,包括移动座件,所述移动座件的表面固定连接有机械臂组件,所述机械臂组件的表面固定连接有摄像组件,所述移动座件还固定连接有连接架体,所述连接架体固定连接有交互屏与调试屏,所述交互屏与调试屏背立设置,所述连接架体的表面还连接有托板件,所述托板件与调试屏位于同一侧面,所述托板件的表面放置有键盘与鼠标,所述键盘、鼠标均与调试屏电性连接,所述连接架体的顶端连接有顶壳件,所述顶壳件的表面连接有深度摄像头,所述深度摄像头与所述交互屏位于同一侧面,所述顶壳件内连接有语音交互模块。
7.作为本实用新型的进一步优化方案,所述移动座件的内部设置有控制模块,所述摄像组件、交互屏、调试屏、深度摄像头与语音交互模块均与控制模块连接。
8.作为本实用新型的进一步优化方案,所述移动座件的表面连接有超声波模块,所述移动座件的下端面设置有驱动轮与从动轮,所述驱动轮、超声波模块均与控制模块连接。
9.作为本实用新型的进一步优化方案,所述移动座件呈圆柱体状,所述移动座件的内部设置有电源模块,所述移动座件的上端面设置有接口面板,所述接口面板包括总开关、电压显示模块、急停开关以及若干组扩展口。
10.作为本实用新型的进一步优化方案,所述顶壳件通过俯仰关节与所述连接架体固定连接。
11.作为本实用新型的进一步优化方案,所述托板件与连接架体铰接,所述连接架体的外表面固定连接有角度限位片,所述托板件的外表面连接有限制杆,所述限制杆与所述角度限位片配合,限制所述托板件与连接架体之间的夹角为零度或九十度。
12.作为本实用新型的进一步优化方案,所述托板件的上端表面连接有磁吸装置,所述调试屏包括外壳件,所述托板件与连接架体之间的夹角呈零度时,所述托板件通过磁吸装置与外壳件吸附固定。
13.作为本实用新型的进一步优化方案,所述托板件的表面开设有卡槽,所述卡槽内
连接有上下移动的滑板件,所述键盘或/和放置于卡槽内,所述滑板件的下端连接有驱动件。
14.作为本实用新型的进一步优化方案,所述托板件的表面开设有按压槽口,所述驱动件包括水平移动的滑块件,所述滑板件的下端面设置有楔面,所述滑块件通过楔面顶起所述滑板件,所述卡槽的侧壁开设有限制槽件,所述限制槽件限制所述滑板件的最低位置。
15.作为本实用新型的进一步优化方案,所述外壳件的顶部设置有接收器接口,所述控制模块通过接收器接口与鼠标连接。
16.本实用新型的有益效果在于:本实用新型的移动式服务机器人是专为服务型机器人教学与实践打造的一款应用开发教学平台,是适用于学习者以及开发人员的低成本、易上手的开发平台,为使用者提供一些入门级的外围模块以及示例工程。配置intel的微型主机、15.6寸高清显示屏、深度摄像头、语音交互模块、机械臂、超声波检测、激光导航等模块。功能强大,接口丰富,设计精简,支持深度学习、数据采集处理、语音交互、仿真训练、激光导航、超声波检测等多项服务型机器人应用开发技术的全流程学习,能够满足服务型机器人应用开发的需求;通过设置可以翻折的托板件,便于使用者编程使用,通过设置的磁吸装置可在键盘鼠标不用时将整个托板件收起,减少占用空间以及保护调试屏;整个服务机器人制备成本低,操作方便,使用灵活,便于服务系统开发推广使用。
附图说明
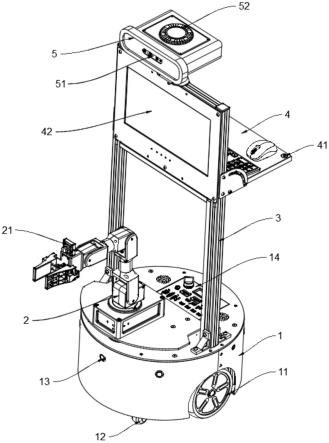
17.图1是本实用新型的整体结构示意图;
18.图2是本实用新型的图1的侧面结构示意图;
19.图3是本实用新型的图2的背面结构示意图;
20.图4是本实用新型的图2的左侧视图;
21.图5是本实用新型的图1的俯视结构示意图;
22.图6是本实用新型的移动座件的上端面的结构示意图;
23.图7是本实用新型的托板件的内部结构示意图。
24.图中:1、移动座件;11、驱动轮;12、从动轮;13、超声波模块;14、接口面板;141、扩展口;142、总开关;143、电压显示模块;144、急停开关;2、机械臂组件;21、摄像组件;3、连接架体;4、托板件;41、磁吸装置;42、交互屏;43、调试屏;431、外壳件;44、接收器接口;45、卡槽;46、滑板件; 47、滑块件;48、限制槽件;49、按压槽口;5、顶壳件;51、深度摄像头;52、语音交互模块;53、俯仰关节。
具体实施方式
25.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术作出一些非本质的改进和调整。
26.实施例1
27.如图1-图7所示,一种移动式服务机器人,包括移动座件1,所述移动座件1的表面固定连接有机械臂组件2,所述机械臂组件2的表面固定连接有摄像组件21,所述移动座件1还固定连接有连接架体3,所述连接架体3固定连接有交互屏42与调试屏43,所述交互屏42
与调试屏43背立设置,所述连接架体3的表面还连接有托板件4,所述托板件4与调试屏43位于同一侧面,所述托板件4的表面放置有键盘与鼠标,所述键盘、鼠标均与调试屏43电性连接,所述连接架体3的顶端连接有顶壳件5,所述顶壳件5的表面连接有深度摄像头51,所述深度摄像头51与所述交互屏42位于同一侧面,所述顶壳件5内连接有语音交互模块52。
28.在实际的使用中,托板件4的位置一般在离地约80cm处,符合大部分人群坐在椅子上时的编程开发设备,托板件4的两侧连接有连接片,通过连接片配合螺栓、螺丝来限制该托板件4的位置,在实际的使用中,也可以通过两侧螺丝调整托板件4的位置;机械臂组件2为四轴机械臂,其顶部设置摄像组件 21,该摄像组件21实际为单目摄像头,单目摄像头的安装是方便机械臂的夹取,同时也可以将整个机械臂取下作为一个单独的模块使用。
29.进一步的,所述移动座件1的内部设置有控制模块,所述摄像组件21、交互屏42、调试屏43、深度摄像头51与语音交互模块52均与控制模块连接;所述移动座件1的表面连接有超声波模块13,所述移动座件1的下端面设置有驱动轮11与从动轮12,所述驱动轮11、超声波模块13均与控制模块连接;所述移动座件1呈圆柱体状,所述移动座件1的内部设置有电源模块,所述移动座件1的上端面设置有接口面板14,所述接口面板14包括总开关142、电压显示模块143、急停开关144以及若干组扩展口141。
30.移动座件1即为底盘部分,其配置了激光雷达、超声波模块13、驱动轮11、从动轮12、接口面板14,该底盘的电源模块包括一块29.4v的锂电池,通过该电池来对该装置中的各模块进行供电,通过电源模块转换适合的电压给各个传感器模块进行供电,整个设备的行走由两个配置减震装置的驱动轮11以及四个保证平衡的从动轮12(万向轮)驱动,各个传感器模块由整机的“大脑”——一个intel的微型主机控制,该部分即为本实施例中的控制模块,底盘还延伸出多种供电、数据传输接口给使用者方便对设备进行各种传感器的扩展。
31.进一步的,所述顶壳件5通过俯仰关节53与所述连接架体3固定连接。该俯仰关节53为手动调节式,该俯仰关节53包括两个侧片,每个侧片开设有弧形弯孔,通过弧形弯孔内连接螺栓、螺钉件来固定该俯仰关节53,通过调节弧形弯孔内螺栓、螺钉件的位置,从而调节顶壳件5的俯仰角度。
32.进一步的,所述托板件4与连接架体3铰接,其中铰接的具体方式为,所述连接架体3的外表面固定连接有角度限位片,所述托板件4的外表面连接有限制杆,所述限制杆与所述角度限位片配合,限制所述托板件4与连接架体3 之间的夹角为零度或九十度。具体的,角度限位片的表面开设有弧形槽孔,限制杆插入于弧形槽孔内。
33.进一步的,所述托板件4的上端表面连接有磁吸装置41,所述调试屏43 包括外壳件431,所述托板件4与连接架体3之间的夹角呈零度时,所述托板件4通过磁吸装置41与外壳件431吸附固定。具体的,在实际的使用中,可以将外壳件431的表面同样设置磁吸装置41,通过两者的磁力吸附作用,来固定托板件4,其中,磁吸装置41可以选用磁铁件。
34.进一步的,所述托板件4的表面开设有卡槽45,所述卡槽45内连接有上下移动的滑板件46,所述键盘或/和放置于卡槽45内,所述滑板件46的下端连接有驱动件。该卡槽45可以单独设置一组,用于放置键盘或鼠标(根据需求不同,选用不同大小的卡槽45),也可以设置两组,驱动件可以选用现有的任一伸缩机构(如电动推杆),通过伸缩机构的驱动,驱动滑板件46上下移动,从而使托板件4在折叠时,键盘、鼠标可以隐藏于卡槽45内,且不会对调试屏 43造成影响。
35.进一步的,在本实施例中,驱动件的驱动方式选用手动方式,具体如下:所述托板件4的表面开设有按压槽口49,所述驱动件包括水平移动的滑块件47,所述滑板件46的下端面设置有楔面,所述滑块件47通过楔面顶起所述滑板件 46,所述卡槽45的侧壁开设有限制槽件48,所述限制槽件48限制所述滑板件 46的最低位置,即使用者将托板件4翻开时,可以通过按压滑块件47,使其插入于滑板件46的下方,从而顶起滑板件46,从而使放置在滑板件46表面键盘、鼠标顶起至托板件4的表面,便于使用者使用,在需要将该托板件4折叠时,滑块件47的表面开设有拉槽或者拉块,通过该拉槽或拉块将滑块件47拉出,从而使滑板件46下移。
36.进一步的,所述外壳件431的顶部设置有接收器接口44,所述控制模块通过接收器接口44与鼠标连接。
37.需要说明的是,该移动式服务机器人,是专为服务型机器人教学与实践打造的一款应用开发教学平台,是适用于学习者以及开发人员的低成本、易上手的开发平台,为使用者提供一些入门级的外围模块以及示例工程。配置intel的微型主机、15.6寸高清显示屏、深度摄像头、语音交互模块、机械臂、超声波检测、激光导航等模块。功能强大,接口丰富,设计精简,支持深度学习、数据采集处理、语音交互、仿真训练、激光导航、超声波检测等多项服务型机器人应用开发技术的全流程学习,能够满足服务型机器人应用开发的需求;在使用时通过设置可以翻折的托板件4,便于使用者编程使用,通过设置的磁吸装置41可在键盘鼠标不用时将整个托板件4收起,减少占用空间以及保护调试屏 43;整个服务机器人制备成本低,操作方便,使用灵活,便于服务系统开发推广使用。
38.本实用新型的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
39.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
40.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
41.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不应理解为必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例
的特征进行结合和组合。
42.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
43.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1