一种热轧钢带用机械手抓取装置的制作方法
1.本实用新型涉及热轧钢带生产技术领域,尤其涉及一种热轧钢带用机械手抓取装置。
背景技术:
2.在现有的热轧钢带生产中,热轧后钢带通过蛇形振荡器左右摆动后整体呈s型摆放在平板链上,其中钢带头部受到摆动力的作用,可能出现头部贴壁、头身贴合、头部回弯、头部斜卧等不同姿态,使钢带无法自动进入辊道入口,影响到钢带的自动卷取,并且国内很多产线热轧钢带头部无法自动穿入后面的辊道,而是由人工拿长柄夹钳先摆正钢带头部位置,在送入辊道时用夹钳夹住钢带将钢带头部送入辊道,该生产方式工作效率低,并且该操作具有危险性,工人极易被烧伤烫伤,因此急需发明一种热轧钢带用机械手抓取装置,可配合机器人使用,能够自动抓取热轧钢带并能摆正钢带头部,将热轧钢带送入辊道。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种热轧钢带用机械手抓取装置,以解决上述热轧钢带头部姿态各异,无法进入辊道以及人工使用夹钳夹取钢带送入辊道的技术问题。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种热轧钢带用机械手抓取装置,包括驱动组件、滚轮抓手和激光测距组件;所述滚轮抓手和所述激光测距组件分别与驱动组件连接;所述驱动组件包括防护罩以及防护罩内部设置的固定座、伺服电机、平行开闭气爪、减速器、支架、联轴器、轴承座和锁紧螺母,所述伺服电机、减速器、联轴器和滚轮抓手从上到下依次同轴连接,且对称设置有两组,伺服电机、减速器、联轴器、滚轮抓手从上到下依次同轴连接,且对称设置有两组,两个滚轮抓手上部均穿过轴承座、锁紧螺母与联轴器下部固定连接,滚轮抓手上部与轴承座转动连接,滚轮抓手上部通过螺纹与锁紧螺母连接,锁紧螺母下部与轴承座上部抵接,两个伺服电机转向相反,所述固定座侧部与机器人的机械手连接,所述固定座下部与平行开闭气爪的缸体固定连接,所述平行开闭气爪的缸体向两侧同时延伸出活塞杆,两侧活塞杆分别固定有气动板,两个所述气动板分别固定连接有支架,所述减速器外壳下部与支架上部连接,轴承座侧部与支架侧部连接,所述滚轮抓手向下延伸出防护罩外,且能够在平行开闭气爪的活塞杆作用下直线移动相互靠近或相互远离,所述激光测距组件穿过防护罩与固定座固定连接。
6.进一步的,所述防护罩包括壳体侧板、护板和壳体,所述壳体其中一侧开设有侧板安装部,所述侧板安装部安装有壳体侧板,与侧板安装部相邻的侧面开设有护板安装部,所述护板安装部安装有护板,所述壳体侧板开设有连接架孔,用于激光测距组件与固定座连接,所述壳体下部开设有长条孔,所述滚轮抓手穿过长条孔一端设置在壳体内,另一端延伸出壳体外,所述壳体顶部开设有管线孔。
7.进一步的,所述滚轮抓手包括滚轮、隔热板和滚轮轴,所述滚轮轴、隔热板和滚轮
从上到下依次固定连接,所述滚轮轴穿过长条孔依次与所述轴承座、锁紧螺母以及联轴器连接。
8.进一步的,所述轴承座侧部设置有轴承座安装部,所述轴承座安装部与支架固定连接,所述轴承座上贯穿设置有滚轮轴孔,所述滚轮轴与滚轮轴孔通过轴承可转动连接。
9.进一步的,所述减速器上部设置有电机轴孔,所述伺服电机输出轴插入所述电机轴孔与所述减速器驱动连接,所述减速器下部设置有减速器轴,所述减速器轴与所述联轴器上部配合连接。
10.进一步的,所述支架包括座体、减速器连接板、气爪连接板、轴承座连接板,座体上部设置有减速器连接板,减速器连接板上开设有用以穿过减速器轴的减速器轴孔,座体侧面设置有气爪连接板,气动板通过螺栓与气爪连接板固定连接,座体上与气爪连接板平行的侧面设置有轴承座连接板,用以固定轴承座。
11.进一步的,所述固定座朝向护板安装部的一侧设置有固定部,所述固定部穿过护板安装部连接机器人的机械手。
12.进一步的,固定部远离护板安装部一侧固定连接有支撑臂,支撑臂沿垂直于壳体侧板的方向设置,靠近壳体侧板的一端设置有连接架安装部,用于安装激光测距组件,支撑臂两端在下部表面固定设置有气爪安装部,气爪安装部与平行开闭气爪的缸体表面固定连接。
13.进一步的,所述减速器连接板上设置有温度传感器。
14.进一步的,所述激光测距组件包括测量热轧钢带头部距离的激光测距仪和连接架,所述连接架包括互相垂直的连接臂,其中一个连接臂与激光测距仪固定连接,另一个连接臂穿过壳体侧板与固定座侧部的连接架安装部固定连接。
15.本实用新型所述的一种热轧钢带用机械手抓取装置具有以下优势:
16.(1)本实用新型所述的一种热轧钢带用机械手抓取装置,平行开闭气爪两侧均设置有双向的活塞杆,并且活塞杆与支架连接,支架通过轴承座将活塞杆的运动传递给滚轮抓手,实现了两个滚轮抓手对向靠近或反向远离,实现对热轧钢带的夹紧抓取或松开,伺服电机通过减速器和联轴器将运动传递给滚轮轴,带动整个滚轮抓手转动,由于两个伺服电机转向相反,所以能够实现两个滚轮抓手对热轧钢带的抓取以及钢带缓缓退出的操作,能够实现对热轧钢带头部摆正以及送入辊道进行卷取的操作。
17.(2)本实用新型所述的一种热轧钢带用机械手抓取装置,滚轮抓手上的隔热板起到阻隔热传导的作用,壳体上开设有管线孔,用于接线以及平行开闭气爪管路通过,可通入风冷管进行风冷调节,保证其正常工作。
18.(3)本实用新型所述的一种热轧钢带用机械手抓取装置,激光测距传感器安装于滚轮抓手侧上方,能够检测激光测距仪当前位置到两滚轮抓手之间的热轧钢带的距离。
19.(4)本实用新型所述的一种热轧钢带用机械手抓取装置,能够与机器人配合使用,有利于自动抓取热轧钢带,大大提高生产效率,避免人工操作,实现生产线自动化。
附图说明
20.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在
附图中:
21.图1为本实用新型实施例所述的热轧钢带用机械手抓取装置外部结构示意图;
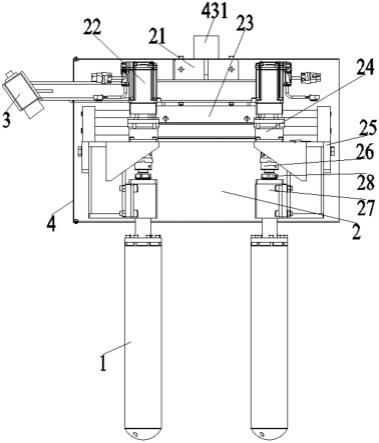
22.图2为本实用新型实施例所述的热轧钢带用机械手抓取装置外部结构另一视角结构示意图;
23.图3为本实用新型所述的热轧钢带用机械手抓取装置内部结构示意图;
24.图4为本实用新型实施例所述的热轧钢带用机械手抓取装置分解结构示意图;
25.图5为本实用新型实施例所述的滚轮抓手结构分解示意图;
26.图6为本实用新型实施例所述壳体结构示意图;
27.图7为本实用新型实施例所述壳体侧板结构示意图;
28.图8为本实用新型实施例所述连接架结构示意图;
29.图9为本实用新型实施例所述固定座结构示意图;
30.图10为本实用新型实施例所述平行开闭气爪结构示意图;
31.图11为本实用新型实施例所述的支架结构示意图;
32.图12为本实用新型实施例所述的轴承座示意图;
33.图13为本实用新型实施例所述的减速器示意图。
34.附图标记说明:
35.1、滚轮抓手;2、驱动组件;21、固定座;211、固定部;212、连接架安装部;213、气爪安装部;214、支撑臂;22、伺服电机;23、平行开闭气爪;231、缸体顶面;232、气动板;233、支架安装部;24、减速器;241、电机连接部;242、支架连接部;243、减速器轴;244、电机轴孔;25、支架;251、减速器连接板;252、减速器轴孔;253、温度传感器;254、气爪连接板;2541、气爪定位槽;255、座体;256、轴承座连接板;26、联轴器;27、轴承座;271、轴承座安装部;272、滚轮轴孔;28、锁紧螺母;3、激光测距组件;31、连接架;311、第一连接臂;312、第二连接臂;313、激光测距座;314、连接架座;32、激光测距仪;4、防护罩;41、壳体侧板;411、连接架孔;412、连接脚;42、护板;421、翻边;43、壳体;431、管线孔;433、护板安装部;434、侧板安装部;435、长条孔。
具体实施方式
36.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
37.在本实用新型中涉及“第一”、“第二”、“内”、“外”、“上”、“下”、等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量,“上”、“下”以附图标注为准。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当实施例之间的技术方案能够实现结合的,均在本实用新型要求的保护范围之内。
38.下面将参考附图并结合实施例来详细说明本实用新型。
39.实施例所述的一种热轧钢带用机械手抓取装置,应用环境是高温高湿环境,抓取的钢带温度≥400℃,钢带厚度范围:1.2-6.5mm,钢带宽度范围:325-525mm,热轧钢带用机械手抓取装置主要配套钢带自动牵引机器人使用,完成钢带的抓取,钢带头部位姿调整,牵引送至辊道等操作。
40.具体的如图1至图4所示,所述热轧钢带用机械手抓取装置包括驱动组件2、滚轮抓手1和激光测距组件3;滚轮抓手1和激光测距组件3分别与驱动组件2连接;驱动组件2包括防护罩4、固定座21、伺服电机22、平行开闭气爪23、减速器24、支架25、联轴器26、轴承座27和锁紧螺母28;固定座21、伺服电机22、平行开闭气爪23、支架25、减速器24、联轴器26、轴承座27和锁紧螺母28设置在防护罩4内部,伺服电机22、减速器24、联轴器26、滚轮抓手1从上到下依次同轴连接,且对称设置有两组,两个滚轮抓手1上部均穿过轴承座27、锁紧螺母28与联轴器26下部固定连接,滚轮抓手1上部与轴承座27可转动连接,滚轮抓手1上部通过螺纹与锁紧螺母28连接,锁紧螺母28下部与轴承座27上部抵接,防止滚轮抓手1轴向移动从轴承座27上脱落,两个伺服电机22转向相反,固定座21设置在防护罩4上部,固定座21侧部与机器人连接,固定座21下部与平行开闭气爪23的缸体固定连接,平行开闭气爪23为双向平行开闭气爪,向两侧同时延伸出活塞杆,两侧活塞杆分别与支架25固定连接,减速器24外壳下部与支架25上部连接,轴承座27侧部与支架25侧部连接,滚轮抓手1向下延伸出防护罩4外,且能够在平行开闭气爪23的活塞杆作用下直线移动相互靠近或相互远离,以实现夹紧或者放松,激光测距组件3穿过防护罩4与固定座21固定连接。
41.具体的,结合图1至4以及图6、图7所示,防护罩4包括壳体侧板41、护板42和壳体43,壳体43其中一侧开设有缺口,该缺口为侧板安装部434,侧板安装部434安装有壳体侧板41,与侧板安装部434相邻的侧面也开设有长条状缺口,此处缺口为护板安装部433,护板安装部433安装有护板42,壳体43下部开设有长条孔435,滚轮抓手1穿过长条孔435一端设置在壳体43内,另一端延伸出壳体43外,长条孔435在两个滚轮抓手1相互靠近或相互远离时起到让位作用;壳体43顶部开设有管线孔431,用于伺服电机22的接线、平行开闭气爪23的通气管以及用于风冷的风管通过,保证各部件正常工作;
42.壳体侧板41扣合在侧板安装部434上,上部开设有连接架孔411,用于激光测距组件3穿过与防护罩4内部的固定座21连接,壳体侧板41顶部和底部垂直于壳体侧板41的表面设置均有连接脚412,连接脚412插入壳体43与其通过螺钉连接,护板42为l形,一端扣合在护板安装部433上,另一端与壳体侧板41拼合且扣合在侧板安装部434处,护板42两端边缘设置有翻边421,一侧翻边421与从护板安装部433处伸出的固定座21固定连接,另一侧翻边421与插在连接架孔411处的激光测距组件3固定连接。
43.如图9所示,固定座21朝向护板安装部433的侧部设置有固定部211,固定部211穿过护板安装部433与机器人的机械手连接,固定部211上端面通过螺栓与壳体43的边缘固定,护板42的翻边421与固定部211的边缘固定连接,固定部211远离护板安装部433的一侧固定连接有支撑臂214,支撑臂214沿垂直于壳体侧板41的方向设置,靠近壳体侧板41的一端设置有连接架安装部212,用于安装激光测距组件3,支撑臂214两端在下部表面固定设置有气爪安装部213,用于固定连接平行开闭气爪23;
44.如图8所示,激光测距组件3包括测量热轧钢带头部距离的激光测距仪32和连接架31,连接架31包括互相垂直的第一连接臂311和第二连接臂312,第一连接臂311和第二连接臂312之间设置有加强筋,第一连接臂311端部设置有激光测距座313,激光测距座313与激光测距仪32通过螺栓固定连接,第二连接臂312穿过壳体侧板41的连接架孔411,端部设置有连接架座314,连接架座314与固定座21侧部的连接架安装部212通过螺栓固定连接,激光测距组件3能够随热轧钢带机械手抓取装置同时移动,检测激光测距仪32所在位置与两个
滚轮抓手1中间热轧钢带的距离,以辅助机器人进行操作,由于激光测距仪32的使用方法是现有技术,该处不再进行赘述。
45.如图10所示,平行开闭气爪23上部的缸体顶面231设置有螺栓连接的孔道,与平行开闭气爪安装部213通过螺栓固定连接,将平行开闭气爪23安装在固定座21底部上,平行开闭气爪23两侧的活塞杆分别连接有气动板232,气动板232下部设置有台阶状的支架安装部233,用于连接支架25;
46.如图11所示,支架25包括座体255、减速器连接板251、气爪连接板254、轴承座连接板256,座体255上部设置有减速器连接板251,减速器连接板251上开设有减速器轴孔252,能够便于减速器24与联轴器26连接,座体257侧面上部设置有气爪连接板254,支架安装部233通过螺栓与气爪连接板254固定连接,气爪连接板254上设置有气爪定位槽2541,支架安装部233能够与气爪定位槽2541嵌合,起到连接定位作用,并且能够保证气爪23以及支架25的位置度;座体255上与气爪连接板254平行的侧面设置有轴承座连接板256,用以固定轴承座27,减速器连接板251上设置有温度传感器253,起监测抓取装置内部温度及预警作用,当超过系统设置温度(如55℃)则触发预警,支架25各安装面精加工并且保证平行度,保证滚轮抓手1抓取的精度。
47.进一步的,如图5所示,滚轮抓手1包括滚轮11、隔热板12和滚轮轴13,滚轮轴13、隔热板12和滚轮11从上到下依次固定连接,滚轮轴13与轴承座27通过轴承转动连接,隔热板12耐高温(400℃-500℃)且具有较高的机械强度,导热性差,能够阻隔滚轮11到滚轮轴13的热传导,保证抓取装置内部机电设备工作正常,滚轮11能够逆时针或者顺时针转动,在平行开闭气爪23驱动下,两个滚轮11能够平行打开200mm左右距离直至完全闭合夹紧,两个滚轮11的距离由平行开闭气爪23的活塞杆行程确定,长条孔435的开设长度大于等于两个滚轮11的距离,滚轮11底部采用圆弧过渡结构防止下降过程中与钢带正面碰撞,其材料采用gh3600高温合金,在高温环境下具有良好的耐腐蚀性和较高的机械强度,滚轮11内部为中空结构,有利于减轻重量。
48.进一步的,如图12所示,轴承座27侧部设置有轴承座安装部271,轴承座安装部271与支架25的轴承座连接板256固定连接,轴承座27上贯穿设置有滚轮轴孔272,滚轮轴孔272周向设置有轴承,所述滚轮轴13与滚轮轴孔272通过轴承可转动连接,轴承座27内部的轴承为耐高温深沟球轴承和双列角接触球轴承,能够适应现场的高温环境,能够承受工作过程中各个方向的负载。
49.滚轮轴13穿过滚轮轴孔272后上部套设锁紧螺母28,锁紧螺母28与滚轮轴13通过螺纹固定连接,锁紧螺母28下部与轴承座27上部抵接,滚轮轴13穿过轴承座27的滚轮轴孔272以及锁紧螺母28后与联轴器26下部固定,锁紧螺母28防止滚轮轴13沿滚轮轴孔272轴向移动,使滚轮轴13吊装在轴承座27上,减轻滚轮轴13对联轴器26的拉力。
50.进一步的,如图13所示,减速器24外壳的上部设置有电机连接部241,电机连接部241与伺服电机22的下部固定,电机连接部241上有电机轴孔244,所述伺服电机22输出轴插入电机轴孔244与减速器24驱动连接,减速器24外壳的下部设置有支架连接部242,支架连接部242通过螺栓与减速器连接板251固定连接,减速器轴243穿过支架连接部242伸出,并且从减速器轴孔252向下延伸与联轴器26上部配合连接,每组内的伺服电机22的输出轴、减速器轴243、联轴器26、滚轮轴13同轴设置,保证滚轮11能够同步对中夹紧和打开,确保抓取
钢带的位置精度。
51.防护罩4为壳体43、护板42和壳体侧板41拼装结构,便于安装和拆卸维护,防护罩4外表面安装有防辐射隔热棉,顶部管线孔431可同时走连接伺服电机22的接线和连接平行开闭气爪23的管路,同时风冷管也从此处进入防护罩4内部对抓取装置进行冷却,以保证其正常工作。
52.工作时,将所述热轧钢带用机械手抓取装置安装在机器人的机械手上,平行开闭气爪23两侧活塞杆带动支架25同时向两侧伸出,增大两滚轮抓手1之间的距离,激光测距仪32通过距离计算检测到两个滚轮抓手1中热轧钢带后,平行开闭气爪23两侧活塞杆带动支架25同时向平行开闭气爪23中部的方向靠近,以实现热轧钢带的抓取操作,两个伺服电机22开启,通过减速器24和联轴器26带动滚轮11转动,两个伺服电机22转向相反,两个滚轮11对滚,激光测距仪32实时测量所在位置到热轧钢带端部的距离,同时配合机器人的移动,两个滚轮11对热轧钢带进行头部姿态矫正操作,便于后面送入辊道,热轧钢带姿态矫正后,两个伺服电机22各自换向,配合机器人移动,再次抓取热轧钢带将其送入辊道。
53.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1