一种机器人自动识别拆取工装夹爪的制作方法
1.本实用新型涉及光伏自动化生产技术领域,尤其是涉及一种机器人自动识别拆取工装夹爪。
背景技术:
2.在工业领域中机器人夹爪的应用可以有效替代人手进行工作,同时能给很多的工业制造型企业带来了便利。随着全球自动化、智能化、集成化、无人化进程的推进,对于工装夹爪提出了更高的要求,需要其能高效的、准确的抓取工装线头,并且实现角度,空间位置的变换,从而达到合适的角度,实现公母头的对接。由于光伏线头长度、外形、位置等不确定因素太多,视觉引导定位难度较大,现阶段很多流水线工厂都是利用人工去生产实施的,导致生产效率较低,且对于人员的劳动强度较大。
3.中国专利文献cn 203992935 u记载了一种光伏组件用汇流带的焊接定位工装,但是该结构并不能适应自动化生产的要求,在使用中有缺陷,因此需要改进。
技术实现要素:
4.本实用新型提供了一种机器人自动识别拆取工装夹爪,解决了光伏生产过程中,需要人工对接线头,操作相对繁琐,工作量庞大,整体生产效率较低且存在作业风险的问题。
5.为解决上述技术问题,本实用新型所采用的技术方案是:一种机器人自动识别拆取工装夹爪,包括第一连接座、第一滑台和第二滑台,第一连接座上设有横板和竖板,第一滑台位于横板的下侧,第二滑台位于横板的外侧,第二滑台的下部设有挡板,挡板用于抵靠在插电组件一侧进行限位,第一滑台上设有第一滑板组件,第一滑板组件的下部连接有夹持机构,夹持机构上对称设有卡头,卡头用于将插头夹持后对接到插电组件另一侧。
6.优选的方案中,所述第一滑台包括第一安装座,第一安装座固设在横板的底部,第一安装座通过第一顶推杆和第一滑板组件连接。
7.优选的方案中,所述第二滑台包括第二安装座,第二安装座和竖板固定连接,第二安装座两侧分别设有导杆,两个导杆之间设有多个第二顶推杆,第二顶推杆和导杆通过第二滑板组件连接,挡板位于第二滑板组件靠近夹持机构的一侧。
8.优选的方案中,所述第一滑台通过固定座和夹持机构连接。
9.优选的方案中,所述插电组件包括控制板,控制板的两侧分别设有第二连接座,第二连接座上设有触点凸起,触点凸起和插头插接。
10.优选的方案中,所述插头包括夹持位,夹持位两侧分别设有对接口和线束,对接口上设有沉孔,触点凸起插设在沉孔内。
11.优选的方案中,所述夹持机构包括驱动座,驱动座固设在固定座的底部,驱动座底部两侧分别设有第三滑板组件,第三滑板组件上设有转接板,卡头可拆卸的设置在转接板内侧,卡头上设有圆弧面,圆弧面和插头的外形相匹配。
12.优选的方案中,所述卡头上设有弹片,卡头一侧设有调节杆,调节杆和弹片连接,调节杆用于调整弹片的位置和状态。
13.优选的方案中,所述卡头的外侧平行设置有两个调整座,调整座通过销轴和铰接头连接,铰接头可转动的设置在调节杆上,调节杆和卡头螺纹连接。
14.优选的方案中,所述卡头上平行设置有两个螺纹孔,螺纹孔靠近弹片的一侧设有避让槽,调节杆和螺纹孔螺纹连接,调节杆上设有圆台,铰接头上设有固定槽,圆台可转动的设置在固定槽内。
15.本实用新型的有益效果为:通过在安装座上设置第一滑台能对光伏的线头组件进行限位和支撑,通过夹持机构对待安装的插头进行定位和夹持,然后利用第二滑台将插头移动至设计位置,最后将插头固定在插电组件上,整体操作简单高效,能保证光伏的生产自动化,且整体安装的质量高,一致性好,采用模块化的设计,可实现集成化的车间生产模式,大幅降低人工成本,规避人为操作可能带来的安全隐患,具有良好的经济效益。
附图说明
16.下面结合附图和实施例对本实用新型作进一步说明:
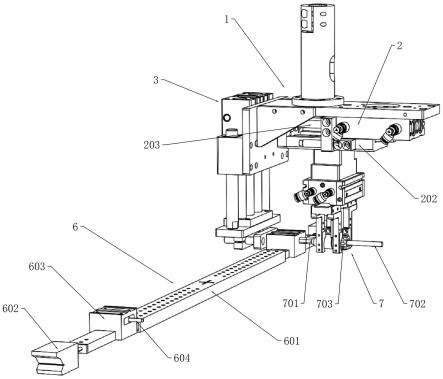
17.图1是本实用新型的安装使用结构示意图状态一;
18.图2是本实用新型的安装使用结构示意图状态二;
19.图3是图1的右视结构示意图;
20.图4是本实用新型的夹持机构固定插头示意图状态一;
21.图5是本实用新型的夹持机构固定插头示意图状态二;
22.图6是图4的右视结构示意图;
23.图7是本实用新型的插头的整体结构示意图;
24.图8是图7的前视结构示意图;
25.图9是本实用新型的卡头整体结构示意图;
26.图10是图9的爆炸结构示意图状态一;
27.图11是图9的爆炸结构示意图状态二;
28.图12是本实用新型的调节杆安装铰接头整体结构示意图;
29.图13是图12的俯视结构示意图;
30.图14是图13的a-a向剖视示意图。
31.图中:第一连接座1;横板101;竖板102;对准槽103;第一滑台2;第一安装座201;第一滑板组件202;第一顶推杆203;第二滑台3;第二安装座301;第二滑板组件302;第二顶推杆303;导杆304;挡板305;固定座4;夹持机构5;驱动座501;第三滑板组件502;转接板503;卡头504;圆弧面505;弹片506;调节杆507;螺纹孔508;避让槽509;铰接头510;销轴511;调整座512;圆台513;固定槽514;插电组件6;控制板601;卡座602;第二连接座603;触点凸起604;插头7;对接口701;线束702;夹持位703;沉孔704;基准位705;对接筒8。
具体实施方式
32.如图1-14中,一种机器人自动识别拆取工装夹爪,包括第一连接座1、第一滑台2和第二滑台3,第一连接座1上设有横板101和竖板102,第一滑台2位于横板101的下侧,第二滑
台3位于横板101的外侧,第二滑台3的下部设有挡板305,挡板305用于抵靠在插电组件6一侧进行限位,第一滑台2上设有第一滑板组件202,第一滑板组件202的下部连接有夹持机构5,夹持机构5上对称设有卡头504,卡头504用于将插头7夹持后对接到插电组件6另一侧。横板101上设置有多个对准槽103,对接筒8可以根据需要安装在不同的对准槽103上,对接筒8上和机器人刚性连接,由此结构,以使得可以通过第一滑台2将夹持在卡头504上的插头7移动到插件组件6的一侧,同时第二滑台3通过挡板305对插电组件6的另一侧进行支撑和限位,保证对接时的稳定,对接的质量好。
33.优选的方案中,所述第一滑台2包括第一安装座201,第一安装座201固设在横板101的底部,第一安装座201通过第一顶推杆203和第一滑板组件202连接。由此结构,以使得可以通过改变第一推杆203的位置从而改变第一滑板组件202的状态,从而控制夹持机构5的工作位置。
34.优选的方案中,所述第二滑台3包括第二安装座301,第二安装座301和竖板102固定连接,第二安装座301两侧分别设有导杆304,两个导杆304之间设有多个第二顶推杆303,第二顶推杆303和导杆304通过第二滑板组件302连接,挡板305位于第二滑板组件302靠近夹持机构5的一侧。由此结构,以使得导杆304起到了导向和限位的作用,保证了顶推杆303的往复精度高,同时第二滑板组件302整体的响应更加迅速,灵敏度更高。
35.优选的方案中,所述第一滑台2通过固定座4和夹持机构5连接。由此结构,以使得可以通过改变固定座4快速灵活的调整夹持机构5的高度和状态,整体适应性更好,能应对不同场景的使用。
36.优选的方案中,所述插电组件6包括控制板601,控制板601的两侧分别设有第二连接座603,第二连接座603上设有触点凸起604,触点凸起604和插头7插接。控制板601的两侧分别设有卡座602,卡座602卡扣在光伏板的外框的设计位置(图上未画出),由此结构,以使得机器人通过卡座602将插电组件6固定在光伏板上后,夹持机构5工作,将插头7拾起并对接到触点凸起604上,整体运转高效方便。
37.优选的方案中,所述插头7包括夹持位703,夹持位703两侧分别设有对接口701和线束702,对接口701上设有沉孔704,触点凸起604插设在沉孔704内。对接口701的外侧设有基准位705,机器人通过视觉定位,精准的抓捕基准位705,匹配设定时的基准位705的角度和方向,并进行相应的调整,保证安装不同的插头7时的对接口701的位置相同,夹持位703外侧为带锥度的圆弧曲面,通过夹持机构5的固定后,能保证对接口701和触点凸起604同轴线,从而对接准确。
38.优选的方案中,所述夹持机构5包括驱动座501,驱动座501固设在固定座4的底部,驱动座501底部两侧分别设有第三滑板组件502,第三滑板组件502上设有转接板503,卡头504可拆卸的设置在转接板503内侧,卡头504上设有圆弧面505,圆弧面505和插头7的外形相匹配。卡头504设置有4个,两两相对为一组,圆弧面505和夹持位703的外部轮廓相匹配,由此结构,以使得两组卡头504对插头7进行充分的固定,保证了对接的精准。
39.优选的方案中,所述卡头504上设有弹片506,卡头504一侧设有调节杆507,调节杆507和弹片506连接,调节杆507用于调整弹片506的位置和状态。弹片506具有一定的弹性,能贴合在卡头504的内侧,由此结构,以使得在应对不同的插头7时,可以通过调节杆507对弹片506的位置和角度进行微调,保证弹片506能适应插头7的外形轮廓,从而接触更加充
分,夹持更加牢固。
40.优选的方案中,所述卡头504的外侧平行设置有两个调整座512,调整座512通过销轴511和铰接头510连接,铰接头510可转动的设置在调节杆507上,调节杆507和卡头504螺纹连接。由此结构,以使得可以转动调节杆507从而改变调整座512的位置,从而将弹片506进行一定的倾斜和微调。
41.优选的方案中,所述卡头504上平行设置有两个螺纹孔508,螺纹孔508靠近弹片506的一侧设有避让槽509,调节杆507和螺纹孔508螺纹连接,调节杆507上设有圆台513,铰接头510上设有固定槽514,圆台513可转动的设置在固定槽514内。由此结构,以使得在转动调节杆507时,不会改变调整座512的方向,保证了调整的方便,两个调节杆507相互配合,且弹片506有一定的弹性,能更好的适应插头7的表面轮廓的变化,根据需要进行调整,适应性更好。
42.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1