一种管材套管薄膜用气动机械手的制作方法
1.本实用新型涉及机械手夹具技术领域,特别涉及一种管材套管薄膜用气动机械手。
背景技术:
2.现有的管材生产过程中,通常采用的是全自动生产线,为此,在不同的分拣工序中,通常需要利用机械手完成多种工序,机械手的抓取代替的传统人工的抓取。现有的机械手通常需要内置气缸,通过撑涨进行抓取,其内部结构复杂,同时抓取开合角度较小,制造成本较高;且现有的机械手,通常对于薄膜状产品的抓取容易出现破损,或者抓取不稳定等问题。为解决上述问题本实用新型提供了一种抓取稳定不易破损且结构简单的气动机械手。
技术实现要素:
3.本实用新型所解决的技术问题可以采用以下技术方案来实现:
4.一种管材套管薄膜用气动机械手,包括第一机体和第二机体,所述第一机体与所述第二机体合并后,内部形成第一气道、第二气道和安装腔,所述安装腔内用以安装机械爪,所述机械爪一端与第一气道抵触,所述机械爪另一端与第二气道抵触,通过对第一气道与第二气道的进出气控制,可控制安装腔内的机械爪的移动位置,进而实现机械爪的抓取与放开。
5.进一步,所述第一气道和所述第二气道为环形气道,所述第一气道与每个安装腔相连,所述安装腔另一端均与第二气道相连。
6.进一步,所述第一机体上设有第一气口和第二气口,所述第一气口与第一气道连通,所述第二气口与第二气道连通,所述第一机体上还设有安装孔。
7.进一步,所述第一机体上设有若干个安装腔,所述安装腔用以装配机械爪。
8.进一步,所述第二机体下方还设有限位挡板,所述机械爪和限位挡板凸设于第二机体表面。
9.进一步,所述机械爪包括爪体和爪体一侧凸设的爪件,所述爪体设于安装腔内,所述爪件往安装腔外延伸。
10.进一步,所述爪体与安装腔之间设有密封环。
11.进一步,所述第二机体上设有与安装腔位置数量对应的行程腔。
12.本实用新型与现有技术相比具有如下突出优点和效果:本实用新型通过第一气道与第二气道为环形气道设置,使每个安装腔与第一气道、第二气道进行连通,可同步控制每个安装腔内的进气量,能同步控制机械手进行夹持移动,具有对管材套管膜卷的抓取更加稳定的优点。
13.本实用新型的特点可参阅本案图式及以下较好实施方式的详细说明而获得清楚地了解。
附图说明
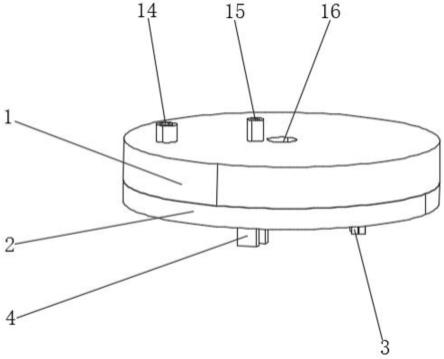
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的底部的结构示意图;
16.图3为本实用新型的第一机体的结构示意图;
17.图4为本实用新型的整体结构剖视图;
18.图中:1、第一机体;11、第一气道;12、第二气道;13,安装腔;14、第一气口;15、第二气口;16、安装孔;2、第二机体;21、行程腔;3、机械爪;31、爪体;32、爪件;33、密封环;4、限位挡板。
具体实施方式
19.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
20.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、 后、顺、逆......)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
21.如图1至图4所示,一种管材套管薄膜用气动机械手,包括第一机体1和第二机体2,第一机体1与第二机体2合并后,内部形成第一气道11、第二气道12和安装腔13,安装腔13内用以安装机械爪3,机械爪3用以抓取管材套管膜卷,机械爪3一端与第一气道11抵触,机械爪3另一端与第二气道12抵触,通过对第一气道11与第二气道12的进出气控制,可控制安装腔13内的机械爪3的移动位置,进而实现机械爪3的抓取与放开。
22.进一步,第一机体1上设有第一气口14和第二气口15,第一气口14与第一气道11连通,第二气口15与第二气道12连通,第一气口14和第二气口15分别通过外部气道连接至空压机,由空压机进一步控制通气量,第一机体1上还设有安装孔16,安装孔16用以与现有的管材覆膜装置进行安装。
23.进一步,第一机体1上设有若干个安装腔13,安装腔13用以装配机械爪3,安装腔13内一端与第一气道11连通,安装腔13另一端与第二气道12连通。
24.进一步,第二机体2下方还设有限位挡板4,所述机械爪3和限位挡板4凸设于第二机体2表面,限位挡板4用以与机械爪3进行配合夹持。
25.进一步,机械爪3包括爪体31和爪体31一侧凸设的爪件32,爪体31设于安装腔13内,爪件32往安装腔13外延伸,延伸至第二机体2外表面。
26.进一步,爪体31与安装腔13之间设有密封环33,通过密封环33的设置能填补爪体31与安装腔13之间的安装缝隙,可进一步保证机体内部的气密性,防止漏气导致爪件夹持不紧等故障发生。
27.进一步,第一气道11和第二气道12为环形气道,通过环形气道的设置使第一气道11与每个安装腔13的一端相互连通,每个安装腔13另一端均与第二气道12相连,通过第一气道11与第二气道12的设置,可同步控制每个安装腔13内的进气量,控制机械手3进行同步移动夹持。
28.进一步,第二机体2上设有与安装腔13位置数量对应的行程腔21,爪件32可在行程腔21内往复移动与限位挡板4配合进行夹持。
29.本实用新型的具体工作步骤,第一机体1上设有的安装腔13可与现有的管材覆膜装置进行安装,安装完成后的气动机械手的第一气口14与第二气口15通过外部气道与现有的空压机进行连接。进行抓取工作时,气体由第二气口15进入第二气道12,随气压增大与第二气道12抵触的机械爪3将随气体方向移动,往第一气道11处靠近。随着位置的移动,凸设的爪件32将与限位挡板4逐渐靠近,可将管材套管膜卷夹持在爪件32与限位挡板4之间,停止对第二气口15的气体输入,完成机械手的抓取工作。进行对管材套管膜卷的松放工作时,气体由第一气口14进入第一气道11,随气压增大与第一气道11抵触的机械爪3将随气体方向移动,往第二气道12处靠近。随着位置的移动,凸设的爪件32将与限位挡板4逐渐分开,可对管材套管膜卷进行松放,停止对第一气口14的气体输入,完成机械手的松放过程。
30.结合上述,本实用新型通过第一气道与第二气道为环形气道设置,使每个安装腔与第一气道、第二气道进行连通,可同步控制每个安装腔内的进气量,能同步控制机械手进行夹持移动,具有对管材套管膜卷的抓取更加稳定的优点。
31.由技术常识可知,本实用新型可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。
技术特征:
1.一种管材套管薄膜用气动机械手,包括第一机体(1)和第二机体(2),其特征在于:所述第一机体(1)与所述第二机体(2)合并后,内部形成第一气道(11)、第二气道(12)和安装腔(13),所述安装腔内(13)用以安装机械爪(3),所述机械爪(3)一端与第一气道(11)抵触,所述机械爪(3)另一端与第二气道(12)抵触,通过对第一气道(11)与第二气道(12)的进出气控制,可控制安装腔(13)内的机械爪(3)的移动位置,进而实现机械爪(3)的抓取与放开。2.根据权利要求1所述的一种管材套管薄膜用气动机械手,其特征在于:所述第一气道(11)和所述第二气道(12)为环形气道,所述第一气道(11)与每个安装腔(13)相连,所述安装腔(13)另一端均与第二气道(12)相连。3.根据权利要求1所述的一种管材套管薄膜用气动机械手,其特征在于:所述第一机体(1)上设有第一气口(14)和第二气口(15),所述第一气口(14)与第一气道(11)连通,所述第二气口(15)与第二气道(12)连通,所述第一机体(1)上还设有安装孔(16)。4.根据权利要求1所述的一种管材套管薄膜用气动机械手,其特征在于:所述第一机体(1)上设有若干个安装腔(13),所述安装腔(13)用以装配机械爪(3)。5.根据权利要求1所述的一种管材套管薄膜用气动机械手,其特征在于:所述第二机体(2)下方还设有限位挡板(4),所述机械爪(3)和限位挡板(4)凸设于第二机体(2)表面。6.根据权利要求5所述的一种管材套管薄膜用气动机械手,其特征在于:所述机械爪(3)包括爪体(31)和爪体31一侧凸设的爪件(32),所述爪体(31)设于安装腔(13)内,所述爪件(32)往安装腔(13)外延伸。7.根据权利要求6所述的一种管材套管薄膜用气动机械手,其特征在于:所述爪体(31)与安装腔(13)之间设有密封环(33)。8.根据权利要求1所述的一种管材套管薄膜用气动机械手,其特征在于:所述第二机体(2)上设有与安装腔(13)位置数量对应的行程腔(21)。
技术总结
本实用新型公开了一种管材套管薄膜用气动机械手,包括第一机体和第二机体,第一机体与所述第二机体合并后,内部形成第一气道、第二气道和安装腔,安装腔内用以安装机械爪,机械爪一端与第一气道抵触,机械爪另一端与第二气道抵触,通过对第一气道与第二气道的进出气控制,可控制安装腔内的机械爪的移动位置,进而实现机械爪的抓取与放开。而实现机械爪的抓取与放开。而实现机械爪的抓取与放开。
技术研发人员:冯晓龙 杨林剑
受保护的技术使用者:临海伟星新型建材有限公司
技术研发日:2022.04.06
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1