一种用于检测标本的智能处置系统
1.本实用新型涉及一种用于检测标本的智能处置系统。
背景技术:
2.由于医院临床科室的飞速发展,一方面是检验科标本量的几何倍数增长,服务对象对结果回报时间要求缩短再短;另一方面实验室空间有限、人员配备不足,已成为制约医院发展的瓶颈。拥有一个科学的、合理化的全实验室自动化体系是大型综合实验室发展的方向,也是大势所趋。目前检验科、病理科及各类实验室主要采用人工进行分料、扫码、喷码、核对、码盘,为了尽快得到检验数据往往需要投入大量的人力进行标本前处置。采用人工操作速率慢、高峰期工作强度大、容易出现疲劳造成错漏。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术中的不足,提供一种能实现自动化操作,节省人工成本,效率高的的智能处置系统。
4.为了解决上述技术问题,本实用新型提供了一种用于检测标本的智能处置系统,包括:第一容置机构、第二容置机构、第一机器人手臂、第二机器人手臂、位置变换机构、扫码机构和喷码机构;所述第一容置机构和第二容置机构分别用以容纳多个装有检测标本的试管;所述位置变换机构包括两个用以夹持试管的夹持机构,所述位置变化机构用以对调两个夹持机构的位置;所述扫码机构用以扫描试管上的标识码,所述喷码机构用以对试管喷涂相应的标识信息;当所述第一机器人手臂获取第一容置机构上的试管以放置在其中一个夹持机构上时,位置变化机构变换两个夹持机构的位置以带动试管依次对应扫描机构和喷码机构,所述第二机器人手臂获取该夹持机构上的试管以放置在第二容置机构上。
5.在一更佳的实施例中,所述位置变换机构包括转动臂,两个夹持机构分别位于所述转动臂的两端,所述转动臂绕其中心转动以带动两个夹持机构变换位置。
6.在一更佳的实施例中,所述位置变化机构还包括用以驱动所述夹持机构绕其自身轴线转动一定角度的旋转机构,当所述夹持机构靠近所述喷码机构时,所述旋转机构带动夹持机构转动。
7.在一更佳的实施例中,所述第一容置机构包括用以夹持试管托盘的第一固定机构,所述第二容置机构包括用以夹持试管托盘的第二固定机构。
8.在一更佳的实施例中,还包括振荡装置,所述第二机器人手臂还用以获取位于第二容置机构上的试管托盘并放置在所述振荡装置上,所述振荡装置用以振荡该试管托盘。
9.在一更佳的实施例中,所述振荡装置包括振荡底座、升降连接所述振荡底座的压盖,当所述试管托盘放置在所述振荡底座时,所述压盖下降以压抵在试管上。
10.在一更佳的实施例中,还包括第三容置机构,所述第三容置机构布置在所述第一容置机构和第二容置机构之间,所述第三容置机构包括用以夹持试管托盘的第三固定机构,所述第二机器人手臂还用以获取位于振荡装置上上的试管托盘并放置在所述第三固定
机构上。
11.在一更佳的实施例中,还包括机架;所述第一容置机构、第二容置机构、第一机器人手臂、第二机器人手臂、位置变换机构、扫码机构和喷码机构分别布置在所述机架上。
12.相较于现有技术,本实用新型的技术方案具备以下有益效果:
13.一种用于检测标本的智能处置系统,包括:第一容置机构、第二容置机构、第一机器人手臂、第二机器人手臂、位置变换机构、扫码机构和喷码机构;所述第一容置机构和第二容置机构分别用以容纳多个装有检测标本的试管;所述位置变换机构包括两个用以夹持试管的夹持机构,所述位置变化机构用以对调两个夹持机构的位置;所述扫码机构用以扫描试管上的标识码,所述喷码机构用以对试管喷涂相应的标识信息;当所述第一机器人手臂获取第一容置机构上的试管以放置在其中一个夹持机构上时,位置变化机构对调两个夹持机构的位置以带动试管依次对应扫描机构和喷码机构,所述第二机器人手臂获取该夹持机构上的试管以放置在第二容置机构上。本实用新型为自动化的分料、扫码、喷码、核对、码盘的智能系统提供硬件支持以能实现自动化操作,节省人工成本,效率高。
附图说明
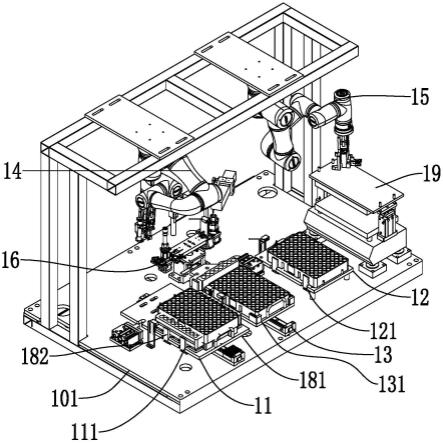
14.图1为本实用新型优选实施例中智能处置系统的立体示意图;
15.图2为本实用新型优选实施例中智能处置系统的立体示意图;
16.图3为图2中的局部放大图;
17.图4为图2中的局部放大图。
具体实施方式
18.下文结合附图和具体实施方式对本实用新型做进一步说明。
19.参阅图1-图4,一种用于检测标本的智能处置系统,所述智能处置系统包括机架10、第一容置机构11、第二容置机构12、第一机器人手臂14、第二机器人手臂15、位置变换机构16、扫码机构171和喷码机构172。所述第一容置机构11、第二容置机构12、第一机器人手臂14、第二机器人手臂15、位置变换机构16、扫码机构171和喷码机构172分别位于所述机架10上,所述机架10包括一操作平台101,所述第一容置机构11和第二容置机构12并排布置在所述操作平台101上,所述位置变换机构16布置在所述第一容置机构11和第二容置机构12之间,所述扫码机构171和喷码机构172靠近所述第二容置机构12布置。
20.所述第一容置机构11和第二容置机构12分别用以容纳多个装有检测标本的试管;所述位置变换机构16包括两个用以夹持试管的夹持机构161,所述位置变化机构用以对调两个夹持机构161的位置;所述扫码机构171用以扫描试管上的标识码,所述喷码机构172用以对试管喷涂相应的标识信息;当所述第一机器人手臂14获取第一容置机构11上的试管以放置在其中一个夹持机构161上时,位置变化机构变换两个夹持机构161的位置以带动试管依次对应扫描机构和喷码机构172,所述第二机器人手臂15获取该夹持机构161上的试管以放置在第二容置机构12上。
21.在实际操作工程中,所述第一机器人手臂14、第二机器人手臂15和位置变换机构16协同工作,第一机器人手臂14获取位于第一容置机构11上的未喷码的试管并放置在夹持机构161上,位置变换机构16变换两个夹持机构161的位置,也即两个夹持机构161的位置对
调,此时靠近第二容置机构12的扫码机构171扫描试管上的识别码,所述喷码机构172对试管喷涂相应的标示信息,在完成后,所述第二机器人手臂15获取位于该夹持机构161上的试管并放置在第二容置机构12上。
22.在本实施例中,所述位置变换机构16包括转动臂162,两个夹持机构161分别位于所述转动臂162的两端,所述转动臂162绕其中心转动180度以带动两个夹持机构161对调位置。所述位置变化机构还包括用以驱动所述夹持机构161绕其自身轴线转动一定角度的旋转机构163,当所述夹持机构161靠近所述喷码机构172时,所述旋转机构163带动夹持机构161转动。
23.所述第一容置机构11包括用以夹持试管托盘的第一固定机构111,所述第二容置机构12包括用以夹持试管托盘的第二固定机构121。所述第一固定机构111和第二固定机构121分别包括底托盘181和伸缩连接在所述底托盘181上的夹持爪182,所述夹持爪182由气缸驱动,在试管托盘放置在底托盘181上时,所述夹持爪182夹持在所述试管托盘的两侧。
24.所述智能处置系统还包括振荡装置19,所述第二机器人手臂15还用以获取位于第二容置机构12上的试管托盘并放置在所述振荡装置19上,所述振荡装置19用以振荡该试管托盘。所述振荡装置19包括振荡底座191、升降连接所述振荡底座191的压盖192,当所述试管托盘放置在所述振荡底座191时,所述压盖192下降以压抵在试管上。
25.所述智能处置系统还包括第三容置机构13,所述第三容置机构13布置在所述第一容置机构11和第二容置机构12之间,所述第三容置机构13包括用以夹持试管托盘的第三固定机构131,所述第二机器人手臂15还用以获取位于振荡装置19上上的试管托盘并放置在所述第三固定机构131上。所述第三固定机构131也包括底托盘181和夹持爪182,其结构与第一固定机构111和第二固定机构121相同,在此不再赘述。
26.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的设计构思并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,利用此构思对本实用新型进行非实质性的改动,均属于侵犯本实用新型保护范围的行为。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1