一种存放空间可调的医疗物流机器人的制作方法
1.本实用新型涉及医疗物流机器人装置领域,尤其涉及一种存放空间可调的医疗物流机器人。
背景技术:
2.如专利号cn214490599u申请的包括箱体、装载箱、分栏板、操作箱、万向轮、第一调节杆以及第二调节杆,所述箱体的内部设置有装载箱,所述分栏板设置于装载箱的内部,所述操作箱设置于箱体的底端,所述万向轮设置于操作箱的底端,所述第一调节杆滑动设置于箱体的左侧,其中第一调节杆包括驱动电机、固定块、转向杆、转向头以及拍摄装置,所述第二调节杆滑动设置于箱体的右侧。本实用新型能够对载物箱进行医用物品的分类放置与传输限位,防止医用物品脱落,达到了限位固定的目的,使医用物品运输更加平稳,便于操作移动,但这种方式不能针对需要对医疗物品存放空间的大小进行调整,且在医疗物流机器人移动过程中,当遇到一些石子或签字笔的阻挡时,容易使医疗物流机器人发生倾倒,影响其正常的使用。
技术实现要素:
3.本实用新型的目的是针对背景技术中存在的问题,一些医疗物流机器人无法对存放空间的大小进行调整,且无法对路途中遇到的石子或签字笔进行清理,为此提出一种存放空间可调的医疗物流机器人。
4.本实用新型的技术方案:一种存放空间可调的医疗物流机器人,包括:机器人主体,所述机器人主体下方设有底盘,所述机器人主体一侧开设有多个储物盒,多个所述储物盒一侧均设有延伸盒,所述储物盒靠近延伸盒一侧开设有延伸口。
5.优选的,所述延伸盒靠近储物盒一端伸进延伸口内,所述延伸盒侧壁与延伸口内侧壁滑动连接,所述延伸盒靠近储物盒一端固定连接有压缩弹簧,所述压缩弹簧远离延伸盒一端与延伸口内底部固定连接,所述延伸盒表面两端均开设有多个定位孔,所述储物盒顶部靠近延伸盒一端竖直贯穿插接有定位插杆,所述定位插杆侧壁与储物盒侧壁滑动连接,所述定位插杆位于多个定位孔上方,所述定位插杆与对应的定位孔卡接连接。
6.优选的,所述储物盒内远离延伸盒一侧水平固定连接有多个限位皮筋,多个所述限位皮筋靠近延伸盒一端均固定连接有定位钩,所述延伸盒内侧壁位于定位钩相对位置均固定连接有定位环,所述定位环与对应的定位钩挂接连接。
7.优选的,所述底盘底面四角处均转动连接有导向轮,所述底盘下方位于导向轮靠近行驶方向的一侧均设有清理推块。
8.优选的,所述清理推块顶部固定连接有缓冲弹簧,所述底盘底面位于清理推块上方均开设有缓冲仓,所述清理推块侧壁与缓冲仓内侧壁滑动连接,所述缓冲弹簧顶部与缓冲仓内顶部固定连接,所述清理推块底部均开设有斜面。
9.优选的,所述底盘表面四角处均竖直固定连接有减震弹簧,所述减震弹簧内均竖
直设有减震杆,所述减震杆底部均与底盘表面固定连接,所述机器人主体底面位于减震杆上方开设有减震槽,所述减震弹簧顶部均与机器人主体底面固定连接,所述减震杆顶部均伸进对应的减震槽内与减震槽内侧壁滑动连接。
10.与现有技术相比,本实用新型具有如下有益的技术效果:通过延伸盒侧壁与延伸口内侧壁滑动连接,便于针对需要对储物盒内的储物空间进行调整,并通过定位插杆插进对应的定位孔,对储物空间的大小进行固定,通过定位钩钩在定位环上,实现限位皮筋对储物盒内物品的勒紧限位,提高物品存放的稳定性;通过清理推块便于对导向轮前方的石子或签字笔等阻拦物进行清理,避免机器人发生倾倒,且通过斜面和缓冲弹簧以及缓冲仓便于对清理推块进行缓冲,避免地面上的一些凹凸部位影响机器正常的行驶。
附图说明
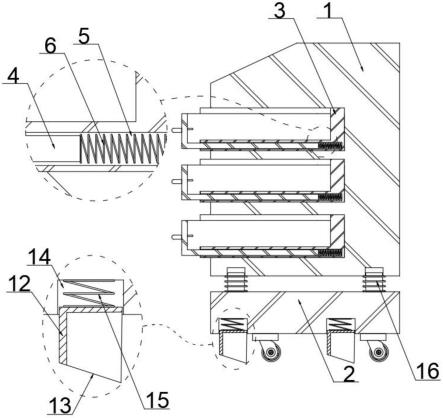
11.图1给出了本实用新型一种实施例的侧面剖切结构示意图;
12.图2为本实用新型一种实施例的正面剖切结构示意图;
13.图3为本实用新型一种实施例的延伸盒连接结构示意图;
14.图4为本实用新型一种实施例的清理推块结构示意图;
15.图5为本实用新型一种实施例的a处放大结构示意图。
16.附图标记:1、机器人主体;2、底盘;3、储物盒;4、延伸盒;5、延伸口;6、压缩弹簧;7、定位孔;8、定位插杆;9、限位皮筋;10、定位钩;11、定位环;12、清理推块;13、斜面;14、缓冲仓;15、缓冲弹簧;16、减震弹簧;17、减震杆;18、减震槽。
具体实施方式
17.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
18.实施例一
19.如图1、2、3、5所示,本实用新型提出的一种存放空间可调的医疗物流机器人,包括:机器人主体1,底盘2设于机器人主体1下方,多个储物盒3开设于机器人主体1一侧,多个延伸盒4分别设于多个储物盒3一侧,延伸口5开设于储物盒3靠近延伸盒4一侧。
20.延伸盒4靠近储物盒3一端伸进延伸口5内,延伸口5内侧壁与延伸盒4侧壁滑动连接,压缩弹簧6一端与延伸盒4靠近储物盒3一端固定连接,压缩弹簧6另一端与延伸口5内底部固定连接,多个定位孔7开设于延伸盒4表面两端,两个定位插杆8竖直贯穿插接于储物盒3顶部靠近延伸盒4一端,储物盒3侧壁与两个定位插杆8侧壁滑动连接,定位插杆8位于多个定位孔7上方,定位插杆8与对应的定位孔7卡接连接。
21.多个限位皮筋9一端均与储物盒3内远离延伸盒4一侧固定连接,多个限位皮筋9另一端均固定连接有定位钩10,多个定位环11固定连接于延伸盒4内侧壁位于多个定位钩10相对位置,定位环11与对应的定位钩10挂接连接。
22.基于实施例一的工作原理是:将需要存放的医疗物品放置在储物盒3内,当需要对储物盒3内的空间进行调整时,将定位插杆8从定位孔7内抽出,然后推拉延伸盒4,使其在延伸口5内滑动,以此来调整储物盒3内空间的大小,调整好以后,将定位插杆8贯穿储物盒3顶部与对应的定位孔7卡接连接,对储物盒3内的空间的大小进行限定,然后将限位皮筋9一端的定位钩10与定位环11挂接连接,对储物盒3内的物品进行勒紧固定,避免其运输过程中发
生移动,提高医疗物品运输的稳定性。
23.实施例二
24.如图1、2、4所示,基于实施例一的基础上,本实用新型提出的一种存放空间可调的医疗物流机器人,底盘2底面四角处均转动连接有导向轮,多个清理推块12均位于底盘2下方位于多个导向轮靠近行驶方向的一侧。
25.四个缓冲弹簧15分别竖直固定连接于清理推块12顶部,四个缓冲仓14均开设于底盘2底面位于清理推块12上方,缓冲仓14内侧壁与清理推块12侧壁滑动连接,缓冲仓14内顶部与缓冲弹簧15顶部固定连接,清理推块12底部均开设有斜面13。
26.四个减震弹簧16竖直固定连接于底盘2表面四角处,四个减震杆17分别竖直位于减震弹簧16内,底盘2表面均与四个减震杆17底部固定连接,四个减震槽18均开设于机器人主体1底面位于四个减震杆17上方,机器人主体1底面与四个减震弹簧16顶部固定连接,减震杆17顶部均伸进对应的减震槽18内与减震槽18内侧壁滑动连接。
27.基于实施例二的工作原理是:在机器人行驶过程中,当导向轮前方出现石子或签字笔等阻挡物时,通过清理推块12便于对阻挡物进行推离,避免其影响机器人的正常行驶,通过斜面13和缓冲仓14以及缓冲弹簧15便于对清理推块12进行缓冲,避免地面上的一些凹凸部位阻挡,影响机器人的正常行驶,通过减震弹簧16和减震杆17以及减震槽18相互配合,便于对机器人行驶过程中发生的颠簸进行缓冲,避免长时间的颠簸对机器人主体1造成损伤。
28.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1