多功能楼梯攀爬机器人
1.本实用新型涉及机器人设备领域,具体是多功能楼梯攀爬机器人。
背景技术:
2.轮式结构是最常见的移动方式,具有结构简单灵活、速度快、稳定性好以及控制简单等优点,因此,轮式驱动的机器人得到了飞速发展和广泛应用,例如在火场救援等极端环境中,为了减少人员入场风险,可先采用此类机器人提前入场检测周围环境。但是轮式结构在非规整的地形环境中行走效率低,越障通过能力差,稳定性差。
3.现有中国专利公开了一种具有攀爬楼梯功能的履带式机器人,授权公告号为cn109823424a,公开日期为2019-05-31,该专利技术具有快速平稳攀爬楼梯功能,且体积较小、结构简单,除能在平地上平稳运行外还能适应不同的楼梯形状,具有极强的越障能力;还设置有机械臂,以实现物品抓取,放置的功能。
4.但此类履带式机器人依旧存在转向缓慢、维修困难、不够经济方便等常见缺点,而且单臂夹爪式机械臂的抓取能力较差,不适用于搬运较大或不规则物体。针对这种情况,本领域技术人员提供了多功能楼梯攀爬机器人。
技术实现要素:
5.本实用新型的目的在于提供多功能楼梯攀爬机器人,以解决上述背景技术中提出的攀爬和搬运能力较差的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.多功能楼梯攀爬机器人,包括机架、吸盘式机械手以及变形轮,所述机架顶端的一侧固定有摄像头架,且摄像头架顶部的一侧嵌设有镜头,所述摄像头架两侧的机架顶端皆安装有吸盘式机械手,且吸盘式机械手包括固定底座,所述固定底座的一端转动连接有第一大臂,且第一大臂的一端转动连接有第二大臂,所述第二大臂的一端转动连接有伸缩关节,且伸缩关节的输出端固定有小臂,所述小臂的一端安装有吸盘手,所述机架的底端对称嵌设有两个履带;
8.所述机架的一侧对称设置有两个变形轮,且变形轮包括主轴,所述主轴的一端皆依次套装有内盘、外盘,且外盘的外侧皆等角度设置有若干个轮毂,所述轮毂的一端皆转动套接于外盘的外侧壁上,且轮毂的另一端皆一体化固定有弧形轮,所述机架的另一侧对称设置有两个行星轮,且行星轮的中轴皆与机架转动连接。
9.作为本实用新型再进一步的方案:所述机架一侧壁的中心位置处嵌设有超声波传感器,且超声波传感器的输出端水平设置,用于测量机器人距离楼梯阶层的距离或者判断机器是否到达楼梯底部,其优点在于测量距离要比红外传感器远,且最近测量距离较小。
10.作为本实用新型再进一步的方案:所述固定底座、第一大臂、第二大臂以及伸缩关节之间的连接位置处皆安装有一个无刷电机,用于实现自动旋转的效果。
11.作为本实用新型再进一步的方案:所述履带位置处的机架底部皆开设有空腔,用
于收纳履带,且履带的两端皆通过伸缩杆与所述空腔的顶部相互连接,通过伸缩杆实现履带的自动升降。
12.作为本实用新型再进一步的方案:所述主轴皆为轴向间隔分布的两个,且内盘、外盘分别套装于对应的主轴端部,相互靠近的两个主轴的另一端皆通过联轴器与一个伺服电机的输出端固定连接,且所述伺服电机皆安装于机架的内部,用于驱动变形轮整体旋转行进,相互远离的两个主轴的另一端皆通过联轴器与一个无刷电机的输出端固定连接,且所述无刷电机皆安装于内盘的外侧壁上,用于驱动外盘整体关于内盘定向定量旋转。
13.作为本实用新型再进一步的方案:所述轮毂的中部皆开设有条形通槽,且所述条形通槽中皆滑动安插有短轴,并且所述短轴的一端皆等角度固定于内盘的外侧壁上,通过短轴与条形通槽的滑动限位作用,实现轮毂、弧形轮一同旋转展开或收缩的功能,从而代替履带攀爬楼梯。
14.作为本实用新型再进一步的方案:所述弧形轮皆采用防火橡胶材质,适用于火场救援等环境,且相邻两个弧形轮之间的端部相互嵌合,确保弧形轮收缩后严丝合缝,不易形变。
15.本实用新型的有益效果是:
16.1、履带用于平地行驶,当超声波传感器检测到接近楼梯时,伸缩杆收缩以收纳履带,同时内盘处的无刷电机定量旋转,使得外盘关于内盘也定量旋转,则在短轴与条形通槽的滑动限位下,轮毂、弧形轮一同旋转展开,此时伺服电机驱动内盘整体旋转,利用弧形轮代替履带攀爬楼梯,从而实现履带式与轮式交替行走的功能;
17.2、固定底座、第一大臂、第二大臂以及伸缩关节之间依次通过一个无刷电机实现自动旋转的效果,而伸缩关节则用于自动调节小臂的外延长度,确保吸盘手吸附到物体并进行不同高度的抬放动作,且搬运过程更加稳定。
附图说明
18.下面结合附图对本实用新型作进一步的说明。
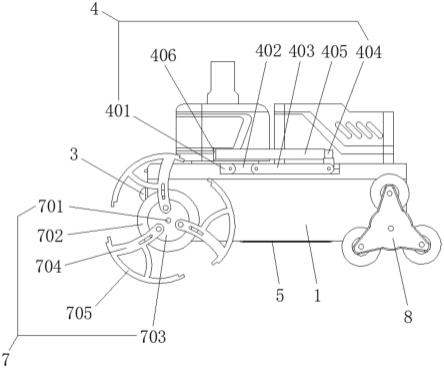
19.图1为多功能楼梯攀爬机器人的正视示意图;
20.图2为图1的侧视示意图;
21.图3为图1的仰视示意图。
22.图中:1、机架;2、摄像头架;201、镜头;3、超声波传感器;4、吸盘式机械手;401、固定底座;402、第一大臂;403、第二大臂;404、伸缩关节;405、小臂;406、吸盘手;5、履带;6、伸缩杆;7、变形轮;701、主轴;702、内盘;703、外盘;704、轮毂;705、弧形轮;8、行星轮。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,请参阅图1~3,本实用新型实施例如下:
24.多功能楼梯攀爬机器人,在图1和图2中:包括机架1、吸盘式机械手4以及变形轮7,机架1顶端的一侧固定有摄像头架2,且摄像头架2顶部的一侧嵌设有镜头201,摄像头架2两侧的机架1顶端皆安装有吸盘式机械手4,且吸盘式机械手4包括固定底座401,固定底座401的一端转动连接有第一大臂402,且第一大臂402的一端转动连接有第二大臂403,第二大臂
403的一端转动连接有伸缩关节404,且伸缩关节404的输出端固定有小臂405,小臂405的一端安装有吸盘手406,机架1的底端对称嵌设有两个履带5;机架1的一侧对称设置有两个变形轮7,且变形轮7包括主轴701,主轴701的一端皆依次套装有内盘702、外盘703,且外盘703的外侧皆等角度设置有若干个轮毂704,轮毂704的一端皆转动套接于外盘703的外侧壁上,且轮毂704的另一端皆一体化固定有弧形轮705,机架1的另一侧对称设置有两个行星轮8,且行星轮8的中轴皆与机架1转动连接。
25.在图2中:机架1一侧壁的中心位置处嵌设有超声波传感器3,且超声波传感器3的输出端水平设置,用于测量机器人距离楼梯阶层的距离或者判断机器是否到达楼梯底部,其优点在于测量距离要比红外传感器远,且最近测量距离较小
26.在图3中:履带5位置处的机架1底部皆开设有空腔,用于收纳履带5,且履带5的两端皆通过伸缩杆6与空腔的顶部相互连接,通过伸缩杆6实现履带5的自动升降。
27.在图1和图2中:主轴701皆为轴向间隔分布的两个,且内盘702、外盘703分别套装于对应的主轴701端部,相互靠近的两个主轴701的另一端皆通过联轴器与一个伺服电机的输出端固定连接,且伺服电机皆安装于机架1的内部,用于驱动变形轮7整体旋转行进,相互远离的两个主轴701的另一端皆通过联轴器与一个无刷电机的输出端固定连接,且无刷电机皆安装于内盘702的外侧壁上,用于驱动外盘703整体关于内盘702定向定量旋转;轮毂704的中部皆开设有条形通槽,且条形通槽中皆滑动安插有短轴,并且短轴的一端皆等角度固定于内盘702的外侧壁上,通过短轴与条形通槽的滑动限位作用,实现轮毂704、弧形轮705一同旋转展开或收缩的功能,从而代替履带5攀爬楼梯;弧形轮705皆采用防火橡胶材质,适用于火场救援等环境,且相邻两个弧形轮705之间的端部相互嵌合,确保弧形轮705收缩后严丝合缝,不易形变。
28.本实用新型的工作原理是:当某一地方发生地震或是火灾时为了防止人员的伤亡可以使用该楼梯攀爬机器人,使用时,履带5用于平地行驶,而摄像头架2顶部的镜头201将检测地的实际情况记录下来,通过内部的图像运输模块快速且准确地将内部的情况传递给救援人员,在保证安全的情况下实施救援;当超声波传感器3检测到接近楼梯之前十米以内的距离时,伸缩杆6收缩以收纳履带5,同时内盘702处的无刷电机定量旋转,使得外盘703关于内盘702也定量旋转,则在短轴与条形通槽的滑动限位下,轮毂704、弧形轮705一同旋转展开,此时伺服电机驱动内盘702整体旋转,利用弧形轮705代替履带5攀爬楼梯,从而实现履带式与轮式交替行走的功能;如此采用复合式移动机构,两个变形轮7作为驱动轮,两个行星轮8作为从动轮,主要在爬楼梯的时候使用,而履带机构用于在地面行走,既满足该楼梯攀爬机器人多种工作环境的要求,行走地更加稳定,又可以减小室内工作时候的转弯半径,并且通过前轮分散驱动,尽量减少电源损耗,延长工作时间。
29.另外,通过添加吸盘式机械手4来方便拿起货物或者是在救援中需要将一些废弃物拿开,首先通过已编好的程序将吸盘手406处于放开状态,在此过程中,固定底座401、第一大臂402、第二大臂403以及伸缩关节404之间依次通过一个无刷电机实现自动旋转的效果,而伸缩关节404则用于自动调节小臂405的外延长度,当吸盘手406到达物品所在的位置后程序使其处于吸附状态,从而将物体进行不同高度的抬放动作,且搬运过程更加稳定。
30.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实
用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1