一种轮式机器人悬挂避震结构及轮式机器人的制作方法
1.本实用新型涉及格斗机器人技术领域,更具体而言,涉及一种轮式机器人悬挂避震结构及轮式机器人。
背景技术:
2.格斗机器人是一种具有较高观赏性和技术要求的机器人比赛,通过格斗机器人将对方机器人破坏或者掀翻至完全失效或不能移动状态则判定取胜,因此,格斗机器人的结构稳定性和耐冲击能力是考量格斗机器人的重要指标。
3.现有格斗机器人主要失效模式之一就是因减速箱受到冲击而失效,因此,加强对减速箱的保护至关重要。授权号为cn209812331u的中国实用新型专利公开了“一种轻量级模块化周身旋转举升机器人”,其结构虽然一定程度上对电机和减速机进行了保护,但因为其减震结构是通过减震橡胶块与机架固连,若采用较硬减震橡胶柱,则只能在承受大冲击时能起作用,不能一直保持很好的抓地性;若采用偏软减震橡胶,则减速箱容易在运行过程中发生位置的错位,影响正常行驶。
4.因此,有必要对现有技术进行改进。
技术实现要素:
5.为了克服现有技术中存在的不足,提供一种减速箱稳定性好、可承受较大冲击的轮式机器人悬挂避震结构及轮式机器人。
6.为了解决上述技术问题,本实用新型采用的技术方案为:
7.一种轮式机器人悬挂避震结构,包括行走轮、驱动装置、顶部碳纤维板、底部碳纤维板、柔性上顶盖和柔性下底板,所述柔性上顶盖和柔性下底板分别设置在驱动装置的上下两端,柔性上顶盖、柔性下底板靠近驱动装置的端面均设置有与驱动装置连接的定位台阶;
8.所述顶部碳纤维板设置在柔性上顶盖靠近驱动装置的一侧,底部碳纤维板设置在柔性下底板靠近驱动装置的一侧,所述顶部碳纤维板和底部碳纤维板上均设置有避让所述定位台阶的开槽;
9.所述驱动装置和行走轮均设置有两个,分别设置在柔性下底板的左右两侧,所述驱动装置的驱动轴与行走轮连接。
10.为了方便放置控制器,所述顶部碳纤维板中部设置有用于放置控制器的安装孔,所述柔性上顶盖靠近顶部碳纤维板的一侧设置有控制器容纳腔。
11.为了提高抗冲击性能,所述柔性上顶盖上端两侧设置有减震条。
12.为了优化结构,所述顶部碳纤维板和底部碳纤维板均为左右对称结构,顶部碳纤维板和底部碳纤维板上均设置有减重孔。
13.为了提高减震效果及增强侧向刚度,避免因扭转造成减速机错位,所述柔性下底板下端设置底部弹簧钢板,底部弹簧钢板与柔性下底板固定连接。
14.进一步的,所述驱动装置为行驶减速机。
15.一种轮式机器人,包括上述轮式机器人悬挂避震结构及机架、控制器,所述机架设置在顶部碳纤维板与底部碳纤维板之间,机架上下两端分别与顶部碳纤维板、底部碳纤维板固定连接,机架内侧设置有安装板,安装板上端设置有控制器安装台,所述控制器设置在控制器安装台上。
16.进一步的,所述机架与顶部碳纤维板、底部碳纤维板之间均通过螺栓连接。
17.本实用新型与现有技术相比所具有的有益效果为:
18.1、本实用新型通过柔性上顶盖、柔性下底板与驱动装置连接,避免比赛过程中因驱动装置受到刚性冲击而失效,通过碳纤维板作为避震结构的框架,增强了结构刚度。本实用新型在不平整场地中也可以持续有抓地力,提高了减速机的稳定性。
19.2、本实用新型在柔性下底板下端设置有底部弹簧钢板,通过底部弹簧钢板在减震的同时可增强侧向刚度,避免因扭转造成减速机错位。
附图说明
20.下面将通过附图对本实用新型的具体实施方式做进一步的详细说明。
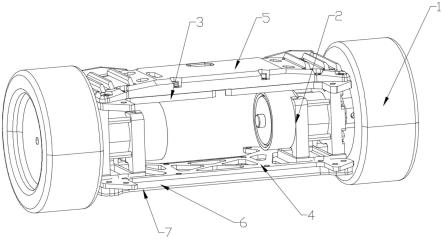
21.图1为实施例1立体结构示意图;
22.图2为图1的爆炸图;
23.图3为轮式机器人立体结构示意图;
24.图4为图3的爆炸图。
25.图中:1-行走轮,2-驱动装置,3-顶部碳纤维板,31-开槽,32-安装孔, 4-底部碳纤维板,5-柔性上顶盖,51-定位台阶,52-控制器容纳腔,53-减震条, 6-柔性下底板,7-底部弹簧钢板,8-机架,81-安装板,82-控制器安装台,9
‑ꢀ
控制器。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例1:
28.如图所示,一种轮式机器人悬挂避震结构,包括行走轮1和驱动装置2、顶部碳纤维板3、底部碳纤维板4、柔性上顶盖5和柔性下底板6,驱动装置2和行走轮1均设置有两个,分别设置在柔性下底板6的左右两侧,驱动装置2的驱动轴与行走轮1连接。柔性上顶盖5和柔性下底板6分别设置在驱动装置2 的上下两端,柔性上顶盖5、柔性下底板6靠近驱动装置2的端面均设置有定位台阶51,驱动装置2采用行驶减速机,行驶减速机上端通过螺栓与柔性上顶盖 5的定位台阶51连接,下端通过螺栓与柔性下底板6的定位台阶连接,通过柔性上顶盖5和柔性下底板6对减速机进行减振和保护,柔性上顶盖5上端两侧设置有减震条53,减小格斗时悬挂避震结构受到的冲击。
29.柔性上顶盖5和柔性下底板6可采用tpu柔性材料。
30.顶部碳纤维板3设置在柔性上顶盖5靠近驱动装置2的一侧并与柔性上顶盖5连接,
底部碳纤维板4设置在柔性下底板6靠近驱动装置2的一侧并与柔性下底板6,通过顶部碳纤维板3、底部碳纤维板4增强悬挂避震结构的结构刚度,顶部碳纤维板3和底部碳纤维板4上均设置有开槽31,定位台阶51穿过开槽31与驱动装置连接。
31.柔性下底板6下端设置有底部弹簧钢板7,底部弹簧钢板7与柔性下底板6 固定连接,底部弹簧钢板7既可以实现弹簧减振的作用,也可以增加扭转刚度,使减震过程中减速机只能直上直下,避免在运行过程中减速机错位而影响正常行驶。
32.顶部碳纤维板3中部设置有用于放置控制器的安装孔32,柔性上顶盖5靠近顶部碳纤维板3的一侧设置有控制器容纳腔52,方便对控制器的安装和保护。
33.为了得到更好的稳定性,顶部碳纤维板3和底部碳纤维板4均采用左右对称结构,顶部碳纤维板3和底部碳纤维板4上均设置有减重孔。
34.实施例2:
35.一种轮式机器人,除了包括实施例1所述轮式机器人悬挂避震结构外,还包括机架8和控制器9,机架8设置在顶部碳纤维板3与底部碳纤维板4之间,机架8上下两端分别与顶部碳纤维板3、底部碳纤维板4通过螺栓固定连接,机架既可以加强对驱动装置的保护,又可安装用于机器人格斗的格斗装置及缓冲材料。
36.机架8内侧设置有安装板81,安装板81上端设置有控制器安装台82,控制器9通过控制器安装台82设置在控制器容纳腔中。
37.上面仅对本实用新型的较佳实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化,各种变化均应包含在本实用新型的保护范围之内。
技术特征:
1.一种轮式机器人悬挂避震结构,包括行走轮(1)和驱动装置(2),其特征在于:包括顶部碳纤维板(3)、底部碳纤维板(4)、柔性上顶盖(5)和柔性下底板(6),所述柔性上顶盖(5)和柔性下底板(6)分别设置在驱动装置(2)的上下两端,柔性上顶盖(5)、柔性下底板(6)靠近驱动装置(2)的端面均设置有与驱动装置(2)连接的定位台阶(51);所述顶部碳纤维板(3)设置在柔性上顶盖(5)靠近驱动装置(2)的一侧,底部碳纤维板(4)设置在柔性下底板(6)靠近驱动装置(2)的一侧,所述顶部碳纤维板(3)和底部碳纤维板(4)上均设置有避让所述定位台阶(51)的开槽(31);所述驱动装置(2)和行走轮(1)均设置有两个,分别设置在柔性下底板(6)的左右两侧,所述驱动装置(2)的驱动轴与行走轮(1)连接。2.根据权利要求1所述的一种轮式机器人悬挂避震结构,其特征在于:所述顶部碳纤维板(3)中部设置有用于放置控制器的安装孔(32),所述柔性上顶盖(5)靠近顶部碳纤维板(3)的一侧设置有控制器容纳腔(52)。3.根据权利要求1所述的一种轮式机器人悬挂避震结构,其特征在于:所述柔性上顶盖(5)上端两侧设置有减震条(53)。4.根据权利要求1所述的一种轮式机器人悬挂避震结构,其特征在于:所述顶部碳纤维板(3)和底部碳纤维板(4)均为左右对称结构,顶部碳纤维板(3)和底部碳纤维板(4)上均设置有减重孔。5.根据权利要求1所述的一种轮式机器人悬挂避震结构,其特征在于:所述柔性下底板(6)下端设置底部弹簧钢板(7),底部弹簧钢板(7)与柔性下底板(6)固定连接。6.根据权利要求1所述的一种轮式机器人悬挂避震结构,其特征在于:所述驱动装置(2)为行驶减速机。7.一种轮式机器人,包括权利要求1至权利要求6任一所述轮式机器人悬挂避震结构,其特征在于:还包括机架(8)和控制器(9),所述机架(8)设置在顶部碳纤维板(3)与底部碳纤维板(4)之间,机架(8)上下两端分别与顶部碳纤维板(3)、底部碳纤维板(4)固定连接,机架(8)内侧设置有安装板(81),安装板(81)上端设置有控制器安装台(82),所述控制器(9)设置在控制器安装台(82)上。8.根据权利要求7所述的一种轮式机器人,其特征在于:所述机架(8)与顶部碳纤维板(3)、底部碳纤维板(4)之间均通过螺栓连接。
技术总结
本实用新型涉及格斗机器人技术领域,更具体而言,涉及一种轮式机器人悬挂避震结构及轮式机器人,包括行走轮、驱动装置、顶部碳纤维板、底部碳纤维板、柔性上顶盖和柔性下底板,柔性上顶盖和柔性下底板分别设置在驱动装置的上下两端,顶部碳纤维板设置在柔性上顶盖靠近驱动装置的一侧,底部碳纤维板设置在柔性下底板靠近驱动装置的一侧,驱动装置和行走轮均设置有两个,分别设置在柔性下底板的左右两侧,驱动装置的驱动轴与行走轮连接。本实用新型通过柔性板与驱动装置连接,避免比赛过程中因驱动装置受到刚性冲击而失效,通过碳纤维板作为避震结构的框架,增强了结构刚度,在不平整场地中也可以持续有抓地力,提高了减速机的稳定性。性。性。
技术研发人员:石磊 赵茂杰 白璐光 田一博
受保护的技术使用者:石磊
技术研发日:2022.05.20
技术公布日:2022/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1