一种风力发电机检测用的智能贴片小车的制作方法
1.本实用新型涉及风力发电机检测的技术领域,尤其是指一种风力发电机检测用的智能贴片小车。
背景技术:
2.风力发电机检测过程中,需要进行叶片内部的贴片操作,用于固定测试所用的传感器。传统的贴片过程,需要风机叶片测试人员携带传感器进入风机叶片内部,并进行测量后完成传感器的固定。
3.由于风机叶片内部空间狭小且不规则,且越往叶尖空间越狭窄,测试人员进入操作难度大,危险性高,同时风机叶片内部光线差,测试人员需要在距离叶根特定的位置进行贴片,光线问题对测试人员的距离测量带来困难,从而使得传感器贴片过程危险性高,耗时长,效率低且精度低。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种风力发电机检测用的智能贴片小车,能够有效降低人员的贴片操作风险,提升贴片的精度和效率。
5.为实现上述目的,本实用新型所提供的技术方案为:一种风力发电机检测用的智能贴片小车,包括履带车、机械臂、多功能机械爪、储物箱、控制单元及供电单元;所述储物箱、控制单元和供电单元分别设于履带车上,所述储物箱内分别设有贴片放置区、垃圾回收区和酒精储存区,所述供电单元用于向履带车、机械臂、多功能机械爪和控制单元供电;所述机械臂设于履带车的顶部,并与控制单元通讯连接,其内设有吸尘管路和酒精喷射管路,所述吸尘管路和酒精喷射管路的尾部分别与垃圾回收区和酒精储存区连接;所述多功能机械爪与机械臂连接,其包括机械爪主体以及分别设于机械爪主体上的贴片机械爪、激光打磨装置、摄像头、吸尘器、酒精喷头和按压头,所述贴片机械爪、激光打磨装置、摄像头和吸尘器分别与控制单元通讯连接,所述吸尘器和酒精喷头分别通过管路与吸尘管路和酒精喷射管路的头部连接,所述按压头设于吸尘器的吸尘头上。
6.进一步,所述机械臂包括支撑平台、第一运动手臂、第二运动手臂、第三运动手臂、电动转轴和软管,所述支撑平台固定于履带车的顶部,所述第一运动手臂的一端固定于支撑平台上,其另一端向上延伸,所述第二运动手臂的一端与第一运动手臂的另一端通过电动转轴连接,其另一端与第三运动手臂的一端通过电动转轴连接,所述第三运动手臂的另一端与多功能机械爪连接,所述软管贯穿设于支撑平台、第一运动手臂、第二运动手臂和第三运动手臂的内部,其内包裹有两条独立的管路,分别为吸尘管路和酒精喷射管路。
7.进一步,所述贴片机械爪包括互相连接的第一驱动电机和机械爪本体,通过第一驱动电机驱动机械爪本体夹取。
8.进一步,所述激光打磨装置包括互相连接的第二驱动电机和激光打磨头,通过第二驱动电机驱动激光打磨头运转。
9.进一步,所述吸尘器包括互相连接的第三驱动电机和吸尘器本体,通过第三驱动电机驱动吸尘器本体运转。
10.进一步,所述贴片放置区内放置有应变片贴片,所述应变片贴片的连接线缆设于其背面,其正面为带强力胶的粘贴面,且粘贴面上覆有保护膜。
11.进一步,所述履带车上安装有距离传感器,所述距离传感器与控制单元连接。
12.本实用新型与现有技术相比,具有如下优点与有益效果:
13.1、本实用新型的智能贴片小车能够实现贴片无人化操作,避免人员进入叶片中,提高操作人员的安全性,同时减少对风机叶片的损伤。
14.2、本实用新型的智能贴片小车仅需单人远程操控即可完成,节省了人力成本。
15.3、本实用新型的智能贴片小车,实际使用时可以根据实际需求规划小车的路径,实现传感器精准定位和测量,避免了人为误差,提升了传感器布置的精度,提升测量效果。
16.4、本实用新型的智能贴片小车作业精度高,速度快,提升测试了工作的效率。
附图说明
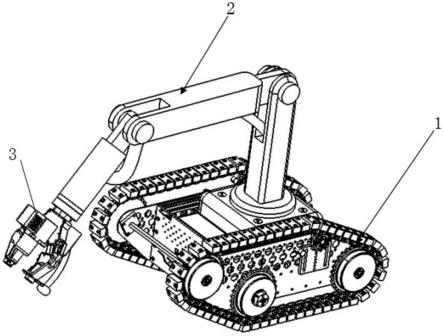
17.图1为本实用新型的智能贴片小车的整体结构示意图。
18.图2为本实用新型的履带车的示意图。
19.图3为本实用新型的多功能机械爪的立体结构示意图。
20.图4为本实用新型的多功能机械爪的主视图。
21.图5为本实用新型的多功能机械爪的侧视图。
22.图6为本实用新型的储物箱的示意图。
23.图7为本实用新型的机械臂的立体结构示意图。
24.图8为本实用新型的应变片贴片的示意图。
具体实施方式
25.下面结合具体实施例对本实用新型作进一步说明,但本实用新型的使用方式不限于此。
26.如图1至图6所示,本实施例所述的风力发电机检测用的智能贴片小车,包括履带车1、机械臂2、多功能机械爪3、储物箱4、距离传感器5、控制单元6及供电单元7;所述储物箱4、距离传感器5、控制单元6和供电单元7分别设于履带车1上,距离传感器5与控制单元6连接,储物箱4内分别设有贴片放置区401、垃圾回收区402和酒精储存区403,通过供电单元7向履带车1、机械臂2、多功能机械爪3、距离传感器5和控制单元6供电;所述机械臂2设于履带车1的顶部,并位于储物箱4的上方,其与控制单元6通讯连接,其内设有吸尘管路和酒精喷射管路,所述吸尘管路的尾部通过垃圾输入口4021与垃圾回收区402连接,酒精喷射管路的尾部通过酒精输出口4031与酒精储存区403连接;所述多功能机械爪3与机械臂2连接,其包括机械爪主体301以及分别设于机械爪主体301上的贴片机械爪302、激光打磨装置303、摄像头304、吸尘器305、酒精喷头306和按压头307,贴片机械爪302、激光打磨装置303、摄像头304和吸尘器305分别与控制单元6通讯连接,所述吸尘器305和酒精喷头306分别通过管路与吸尘管路和酒精喷射管路的头部连接,所述按压头307设于吸尘器305的吸尘头上。
27.如图7所示,机械臂2包括支撑平台201、第一运动手臂202、第二运动手臂203、第三
运动手臂204、软管205和电动转轴206,所述支撑平台201通过四根螺钉207固定于履带车1的顶部,所述第一运动手臂202的一端固定于支撑平台201上,其另一端向上延伸,所述第二运动手臂203的一端与第一运动手臂202的另一端通过键槽和电动转轴206连接,其另一端与第三运动手臂204的一端通过键槽和电动转轴206连接,两个电动转轴206分别于控制单元6通讯连接,所述第三运动手臂204的另一端与多功能机械爪通过四根沉头螺钉308连接,所述软管205贯穿设于支撑平台201、第一运动手臂202、第二运动手臂203和第三运动手臂204的内部,其内包裹有两条独立的管路,分别为吸尘管路和酒精喷射管路。
28.贴片机械爪302包括互相连接的第一驱动电机和机械爪本体,第一驱动电机与控制单元6通讯连接,通过控制单元6向第一驱动电机发送指令来驱动机械爪本体执行夹取作业。
29.激光打磨装置303包括互相连接的第二驱动电机和激光打磨头,第二驱动电机与控制单元6通讯连接,通过控制单元6向第二驱动电机发送指令来驱动激光打磨头执行打磨作业。
30.吸尘器305包括互相连接的第三驱动电机和吸尘器本体,第三驱动电机与控制单元6通讯连接,通过控制单元6向第三驱动电机发送指令来驱动吸尘器本体执行吸尘作业。
31.贴片放置区401内放置有特制的应变片贴片8,如图8所示,应变片贴片8的连接线缆801设于其背面,其正面为带强力胶的粘贴面802,且粘贴面802上覆有保护膜(图中未示出)。
32.本实用新型的智能贴片小车的使用方法包括如下步骤:
33.a、定位:测试人员将智能贴片小车与远程监测系统进行组网通讯,确保远程监测系统与小车的控制单元正常通讯。接着将小车投放到叶片中,小车进入叶片,开启摄像头记录实时小车的行进画面。小车通过距离传感器实时感知小车位置,直至小车到达叶片指定的执行位置。小车行进到执行位置(一般定位在叶片中部,误差控制在0.5米左右,距离传感器可自动测量小车行进距离并确定停泊位置),通过摄像头传回实时画面,远端操作人员确定后,确定目标贴片位置,进行下一步打磨作业。
34.b、打磨:开启激光打磨装置,使用激光打磨头打磨出4
×
6cm的目标贴片区域(该区域要求表面平整,无油污、锈斑、氧化膜、镀层、涂料等),打磨好后采用摄像头拍照,供远端人员检验是否符合合格,合格后进行下一步吸尘操作。
35.c、吸尘:开启吸尘器,通过吸尘器的吸尘头吸出打磨后产生的粉末,并通过吸尘管路将粉末吸至储物箱的垃圾回收区内。
36.d、擦洗:吸尘完毕后,打开酒精喷头,将酒精从储物箱的酒精储存区内抽出并沿着酒精喷射管路输送到酒精喷头,由酒精喷头进行贴片区域的酒精喷雾,覆盖残留碎屑。接着再通过吸尘器吸取残留碎屑,通过摄像头拍照供远端人员检验贴片区域是否达到贴片需求的清洁度,合格后进行下一步粘贴操作。
37.e、粘贴:开启贴片机械爪,通过贴片机械爪从储物箱内的贴片放置区夹取应变片贴片,贴片机械爪夹取应变片贴片后,应变片贴片上的保护膜自动脱落,此处露出粘贴面,通过粘贴面将应变片贴片贴于目标贴片区域,远端人员通过摄像头观察并操作多功能机械爪上安装的按压头按压应变片贴片保持3分钟,确认合格之后,进行下一步。
38.f、布线:通过贴片机械爪夹取应变片贴片背面连接线缆的另一端,由小车带着连
接线缆的另一端返回到指定位置,完成贴片。
39.以上所述之实施例子只为本实用新型之较佳实施例,并非以此限制本实用新型的实施范围,故凡依本实用新型之形状、原理所作的变化,均应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1