发动机缸体搬运装置的制作方法
1.本实用新型的实施例涉及一种搬运装置,特别涉及一种发动机缸体搬运装置。
背景技术:
2.在现有技术中,现有搬运装置对发动机缸体的夹持效果较差,通用性一般,不便于调节搬运装置的使用尺寸,且无法对不同深度的发动机缸体进行夹持,机器人搬运过程中搬运装置无法对发动机缸体持续保持较高的锁紧度,放置后位移误差较为明显,无法一次性校正加工位置,从而加工精度无法保证。
技术实现要素:
3.本实用新型的实施方式的目的在于提供一种对发动机缸体的夹持效果好,通用性强,便于调节搬运装置的使用尺寸,且对不同深度的发动机缸体进行夹持的搬运装置。
4.为了实现上述目的,本实用新型的实施方式设计了一种发动机缸体搬运装置,包括:
5.框架;
6.法兰快换装置,在所述的框架上方固定所述法兰快换装置;
7.夹紧装置,在所述的框架沿着所述的框架的预设轴线方向设置所述夹紧装置;
8.防护装置,在所述的夹紧装置的两侧设置所述的防护装置。
9.进一步,所述的框架呈方形结构,在所述的框架的两侧设置相机安装支架。
10.进一步,所述的法兰快换装置与机器人六轴上的夹具进行快换。
11.进一步,在所述的框架的两侧设置若干个所述的夹紧装置和若干个所述的防护装置。
12.进一步,所述的法兰快换装置,还包括:
13.快换接口,在框架的上方设置所述的快换接口,在所述的快换接口内插入所述的机器人六轴上的夹具,并将所述快换接口固定;
14.电气快换接头,在所述的快换接口的一侧设置一电气快换接头;用于所述的电气快换接头与机器人进行电气连接;
15.气管快换接头,在所述的电气快换接头的一侧固定所述的气管快换接头;所述的气管快换接头用于连接所述发动机缸体搬运装置的气路。
16.进一步,所述的夹紧装置,还包括:
17.伺服驱动缸,在所述的框架的两侧通过轴套活动连接所述的伺服驱动缸;
18.伺服电机,在所述的伺服驱动缸的后侧,在所述的框架内固定所述的伺服电机;所述的伺服电机驱动所述伺服驱动缸进行横向伸缩;
19.缸体夹块,在所述的伺服驱动缸的一端上活动连接所述缸体夹块;所述缸体夹块的表面高出所述的伺服驱动缸的表面。
20.进一步,所述的防护装置,还包括:
21.固定支架,在所述的框架的侧面固定所述的固定支架,所述的固定支架纵向固定在所述的框架的侧面;
22.防撞条,在两个所述的固定支架之间固定所述的防撞条。
23.进一步,在所述的发动机缸体搬运装置的框架内设置电气箱。
24.本实用新型同现有技术相比,采用了在框架上方固定法兰快换装置;在框架沿着框架的预设轴线方向设置夹紧装置;在夹紧装置的两侧设置防护装置。本实用新型的夹紧装置对发动机缸体的夹持效果好,采用了法兰快换装置以后,具有通用性强的特点,便于调节发动机缸体搬运装置的使用尺寸,且对不同深度的发动机缸体进行夹持,解决了在现有技术中,现有搬运装置对发动机缸体的夹持效果较差,通用性一般,不便于调节夹具的使用尺寸,且无法对不同深度的发动机缸体进行夹持,机器人搬运过程中搬运装置无法对发动机缸体持续保持较高的锁紧度,放置后位移误差较为明显,无法一次性校正加工位置,从而加工精度无法保证的技术问题。
附图说明
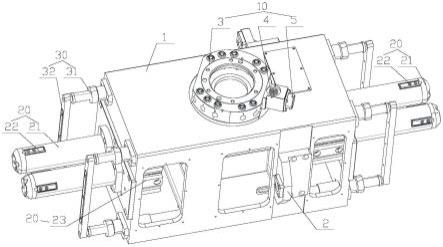
25.图1为本实用新型的结构示意图。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
27.本实用新型的实施方式涉及一种发动机缸体搬运装置,如图1所示,包括:
28.在本实施例中的框架1,作为本实施例的发动机缸体搬运装置的主体结构;
29.在框架1上方固定法兰快换装置10;法兰快换装置10主要用于通过快换的结构,能够实现机器人快速更换本实施例的发动机缸体搬运装置的技术效果,采用法兰快换装置10具有通用性强的特点,使得机器人可以控制不同尺寸的发动机缸体搬运装置。
30.在框架1上,沿着框架1的预设轴线方向设置夹紧装置20;夹紧装置20用于夹紧发动机缸体。
31.在夹紧装置20的两侧设置防护装置30,防护装置30主要起到对夹紧装置20进行夹紧时进行防护。
32.本实施例中的的发动机缸体搬运装置对缸体的夹持效果好,采用了法兰快换装置以后,具有通用性强的特点,便于调节搬运装置的使用尺寸,且对不同深度的发动机缸体进行夹持,解决了在现有技术中,现有搬运装置对发动机缸体的夹持效果较差,通用性一般,不便于调节搬运装置的使用尺寸,且无法对不同深度的发动机缸体进行夹持,机器人搬运过程中搬运装置无法对发动机缸体持续保持较高的锁紧度,放置后位移误差较为明显,无法一次性校正加工位置,从而加工精度无法保证的技术问题。
33.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置,框架1呈方形结构,在框架1的两侧设置相机安装支架2。相机安装支架2用于安装相机,相机拍照,
反馈视觉数据后,2次确认本实施例中的发动机缸体搬运装置定位发动机缸体实际抓取位置。
34.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中的法兰快换装置10与机器人六轴上的夹具进行快换。通过法兰快换装置10解决了不同的发动机缸体和机器人六轴上的夹具的通用性问题。
35.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中,在框架1的两侧设置若干个夹紧装置20和若干个防护装置30。夹紧装置20用于夹紧发动机缸体,防护装置30对夹紧发动机缸体的过程,进行保护,本实施例中的夹紧装置20通过伸缩夹紧装置20,进入紧发动机缸体内,对紧发动机缸体进行夹紧。
36.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中,法兰快换装置10,还包括:
37.在框架1的上方设置快换接口3,在快换接口3内插入机器人六轴上的夹具,并将快换接口3固定;快换接口3与机器人六轴上的夹具对接固定后,完成了法兰快换装置10的快换。
38.在快换接口3的一侧设置一电气快换接头4;用于电气快换接头4与机器人进行电气连接;电气快换接头4同样是通过快换的方式与机器人进行电气连接,这样可以给本实施例中的发动机缸体搬运装置与机器人之间完成电气连接。
39.同样,在电气快换接头4的一侧固定气管快换接头5;气管快换接头5用于连接本实施例中的发动机缸体搬运装置的气路。气管快换接头5连接本实施例中的发动机缸体搬运装置的气路与气源。
40.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中,夹紧装置20,还包括:
41.在框架1的两侧通过轴套22活动连接伺服驱动缸21;伺服驱动缸21的横向伸缩实现了夹取不同深度的发动机缸体。
42.在伺服驱动缸21的后侧,在框架1内固定伺服电机23;伺服电机23驱动伺服驱动缸21进行横向伸缩;伺服电机23提供驱动伺服驱动缸21的动力。伺服电机23是提供驱动力。
43.在伺服驱动缸21的一端上活动连接缸体夹块24;缸体夹块24的表面高出伺服驱动缸21的表面。缸体夹块24用于夹紧发动机缸体时,到夹紧过程中,开始缸体夹块24低于伺服驱动缸21的表面,驱动电机23运行到最后时,缸体夹块24会凸出伺服驱动缸21的表面,进行夹紧。
44.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中的防护装置30,还包括:
45.在框架1的侧面固定固定支架31,固定支架31纵向固定框架1的侧面;固定支架31主要起到固定防撞条32的作用。
46.在两个固定支架31之间固定防撞条32。防撞条32用于保护本实施例中的发动机缸体搬运装置的夹紧装置20在夹紧发动机缸体过程中,进行保护。
47.为了实现上述的技术效果,如图1所示,本实施例中的发动机缸体搬运装置中,在发动机缸体搬运装置的框架1内设置电气箱6。电气箱6用于控制伺服电机23提供驱动伺服驱动缸21。
48.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1