一种子母机器人的母机器人结构的制作方法
1.本实用新型涉及机器人技术领域,特别是一种子母机器人的母机器人结构。
背景技术:
2.现有的挂轨式机器人通常是采用单个机器人沿轨道去执行任务,一方面,如果在轨道上设置多个机器人分别执行任务的话,相互之间很容易发生碰撞,这使得机器人的程序设计更复杂,硬性条件要求更苛刻,才能保证个机器人之间有序进行,且轨道结构设置也会更为复杂;另一方面,机器人无法在不同轨道之间切换自如。
3.现有技术中,也存在子母机器人,但都是用于特定领域,如巡逻或者擦玻璃等,一方面大多为地面行走类,不能在空中执行任务;另一方面,母机器人与子机器人连接结构复杂,且当母机器人释放子机器人时,子机器人从主轨道转移至副轨道时定位不精准,一旦出现偏差,就会导致转移失败,若不设置主副轨道,整个轨道结构将会设置的极为复杂,成本大大提高。
技术实现要素:
4.本实用新型的目的是克服现有技术的上述不足而提供一种连接结构简单,体积小,定位精度准的子母机器人的母机器人结构。
5.本实用新型的技术方案是:一种子母机器人的母机器人结构,包括主体,主体上设有用于在轨道上行走的滚轮机构以及用于控制滚轮机构动作的驱动机构;所述主体上还设有用于连接子机器人的挂载轨道。
6.进一步,所述主体包括主机架和沿主机架延伸出的延伸架,所述挂载轨道连接于延伸架的下方,且与延伸架之间垂直设置。
7.进一步,所述主体上还设有电池、电控系统和充电部,所述充电部连接电池,电池连接电控系统;且充电部的充电电极朝向外侧设置,用于连接外部的充电装置,以对电池进行充电。
8.进一步,所述主体上还设有读卡器和光电传感器,所述读卡器与设于轨道上的定位标签相适配设置,所述光电传感器与设于轨道上的定位感应片相适配设置。
9.进一步,所述滚轮机构包括至少一组相对设置的驱动轮和至少一组相对设置的从动轮,驱动轮通过驱动机构控制其转动。
10.进一步,所述驱动机构包括驱动电机,驱动电机通过传动带连接驱动轮,驱动电机通过传动带来带动驱动轮转动。
11.进一步,所述轨道包括主轨道和副轨道,母机器人通过滚轮机构在主轨道上行走,且挂载轨道与副轨道对接,使母机器人释放子机器人通过挂载轨道进入副轨道。
12.进一步,所述主轨道、副轨道和挂载轨道均为工字型轨道,挂载轨道四周设有用于挂载子机器人的预留空间。
13.进一步,所述电池和电控系统设于主体的主机架底部,所述充电部设于主体的延
伸架侧面;所述读卡器和光电传感器相对设置于滚轮机构的两侧。
14.进一步,所述电控系统与外部的调度系统通信连接,用于接收调度系统发送的调度信息,控制母机器人沿主轨道移动至目标停止点处,并将目标停止点所读取的定位标签信息发送给调度系统;还用于接收光电传感器发送的信号来控制母机器人携带挂载导轨与目标副轨道对齐,并发送轨道对齐信息给调度系统。
15.本实用新型的有益效果:通过在母机器人的主体上设置挂载轨道,只需将挂载轨道与副轨道对齐,就可使子机器人脱离母机器人顺畅进入副轨道,结构简单,无需设置多余的转载机构,就可完成工作任务;通过设置读卡器和光电传感器,能够通过读卡器读取相应的标签信息来作为母机器人的停止点,再通过光电感应精准定位,实现挂载轨道与副轨道的无缝对接,从而使子机器人顺畅进入副轨道执行任务;通过设置充电板,能够使母机器人在非工作段及时充电,不耽误执行任务的时间,大大提高工作效率;另外,母机器人整体结构紧凑,大大减小占用空间。
附图说明
16.图1是本实用新型实施例母机器人的结构示意图;
17.图2是本实用新型实施例母机器人与子机器人的连接结构示意图;
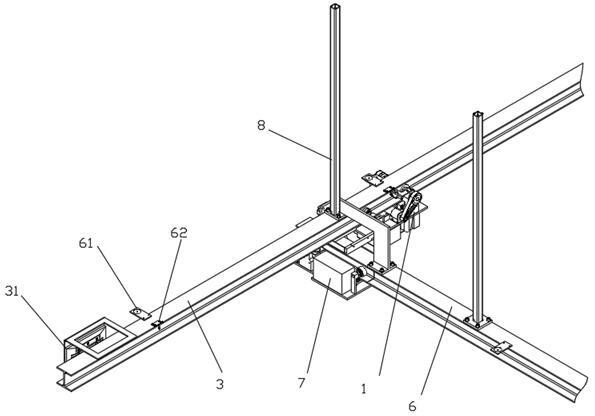
18.图3是本实用新型实施例轨道的结构示意图。
19.附图标识说明:
20.1.主体;2.挂载轨道;3.主轨道;4.驱动电机;5.传动带;6.副轨道;7.子机器人;8.轨道吊架;
21.11.主机架;12.延伸架;13.驱动轮;14.从动轮;15.电池;16.电控系统;17.充电板;18. 读卡器;19.光电传感器;31.充电装置;41.电机安装板;61.定位标签;62.定位感应片;
22.131.主支架;141.从支架;181.第一连接板;191.第二连接板。
具体实施方式
23.以下将结合说明书附图和具体实施例对本实用新型做进一步详细说明。
24.如图1~图3所示:一种子母机器人的母机器人结构,包括主体1,主体上设有用于在轨道上行走的滚轮机构以及用于控制滚轮机构动作的驱动机构;所述主体上还设有用于连接子机器人7的挂载轨道2。
25.具体地,主体1包括主机架11和沿主机架延伸出的延伸架12,主机架11为板体结构,延伸架12与主机架11平行设置,且与延伸架12的连接处设置有凹槽,延伸架为框架结构,包括多个条形板,条形板的一端与主机架11的凹槽卡合连接。
26.本实施例中,主机架11的上表面安装有滚轮机构和驱动机构。其中,滚轮机构包括一对相对设置的驱动轮13和一对相对设置的从动轮14,驱动轮13通过驱动机构控制其转动,而从动轮14不带动力,主要起到支撑作用。驱动轮与从动轮间隔设置,同一侧的一驱动轮和从动轮位于主轨道的工字型凹槽内,另一驱动轮和从动轮则位于主轨道另一侧的工字型凹槽内,从而使得母机器人通过滚轮机构挂载于主轨道3上,并沿主轨道移动。
27.本实施例中,驱动机构包括两个驱动电机4,各驱动电机4分别通过相对应的传动
带5经主支架连接两个驱动轮14,驱动电机4通过传动带5来带动驱动轮转动,进而带动从动轮跟随转动。其中,驱动电机4通过电机安装板41固定于主机架11上,传动带5的两端分别与驱动电机4、驱动轮13进行轴连接。
28.本实施例中,主机架11的板体底面安装有电池15和电控系统16,延伸架12的侧面设有充电板17,充电板17连接电池15,电池连接电控系统16;且充电板15的充电电极朝向外侧设置,用于连接外部的充电装置,以对电池进行充电。充电装置31安装于主轨道3上,当母机器人运行至主轨道的充电装置处时,充电板17上的充电电极接入充电装置对电池进行充电。
29.本实施例通过对滚轮机构、驱动机构、电池、电控系统和充电板进行位置排布,能够合理利主体的空间,使结构更为紧凑,这样母机器人的整体体积就可设计的更小,且重量更轻。
30.本实施例中,主体的主机架11上还设有读卡器18和光电传感器19,读卡器18、光电传感器19与电控系统16电连接。读卡器和光电传感器相对设置,读卡器18通过第一连接板181安装于一驱动轮的主支架131上,光电传感器19通过第二连接板191安装于另一驱动轮的主支架131上。其中,读卡器18优选为rfid读卡器,且读卡器18的感应端朝上设置;光电传感器19优选为光电开关,光电开关的感应端也朝上设置。主轨道3在与每个副轨道6的交叉点侧均设有与读卡器相适配的定位标签61以及与光电传感器相适配的定位感应片62。本实施例之所以要设置两个定位传感器,是因为rfid精度约为
±
10mm左右,不能满足子机器人7从母机器人转移到副轨道的对接要求,主要作为机器人初步定位,作为子机器人欲进入某一目标从轨的从轨停止点;通过读卡器18读取定位标签61内的信息来获取子机器人进入哪条副轨道执行任务,由于副轨道可能有很多条,通过定位标签来获取位置能大大节约成本。为了进一步提高定位精度,本实施例增加了光电传感器来进行二次定位,即母机器人上的光电传感器通过移动至定位感应片处,通过感应到定位感应片对其的遮挡,从而实现定位,其定位精度可达
±
1mm左右,为挂载轨道与副轨道的对接提供良好的精度,方便子机器人进入副轨道工作以及返回至母机器人。因此,本实施例设置两个定位传感器,既能使母机器人确认进入目标轨道获得从轨停止点,又能使母机器人上的挂载轨道与副轨道之间无缝对接,以便于释放子机器人进入副轨道执行任务。
31.本实施例中,挂载轨道2安装于延伸架12的下端,且挂载轨道2四周设有用于挂载子机器人7的预留空间,以便于使子机器人7挂载于挂载轨道2上。挂载轨道2与副轨道6的结构和尺寸相同,以便于无缝对接。
32.本实施例中,主轨道3、副轨道6和挂载轨道2均为工字型轨道,以便于滚轮机构的挂载。且主轨道3通过轨道吊架8悬挂于室内天花板等位置,从而实现不占用地面空间来转运的目的。一条主轨道可分别通过连接架连接多个副轨道,以实现不同子机器人执行不同的任务,相互之间不受干扰,大大提高工作效率。
33.本实施例中,电控系统16与外部的调度系统通信连接,用于接收调度系统发送的调度信息,控制母机器人沿主轨道3移动至目标停止点处,并将目标停止点所读取的定位标签信息发送给调度系统;还用于接收光电传感器19发送的信号来控制母机器人携带挂载导轨与目标副轨道对齐,并发送轨道对齐信息给调度系统。
34.可以理解的是,上述各部件位置的设置仅是本实用新型的一个优选实施例,本实
用新型也可将某些部件设置于其他位置,例如将读卡器的感应端朝向主轨道的凹槽方向设置;又或者将母机器人的整体结构置于一箱体内,由原有的敞开式结构变成半封闭结构,即箱体沿长度方向开设一前后贯通的腔体,腔体的敞口侧只需露出驱动轮、从动轮、读卡器、光电传感器即可,充电板的充电电极可沿箱体伸出至外部,从而保护了内部结构。
35.可以理解的是,母机器人的主体上还可在前进和后退的方向上安装防撞传感器,能够保障机器人在前后行驶方向上不发生碰撞。
36.本实施例的工作原理为:
37.当母机器人释放子机器人时,包括:母机器人在充电点进行充电或待命;当母机器人的电控系统收到调度系统的调度任务后,电控系统控制母机器人运行至任务所在的从轨停止点,即通过母机器人的读卡器读取主轨道上相对应的定位标签的信息,若确认是该定位标签信息,则停止,并发送指令给调度系统,且通过光电传感器进行精准定位,当电控系统接收到信号后控制母机器人停止,此时挂载轨道与目标副轨道接触对齐;确认轨道对齐后,调度系统给子机器人发送指令,使子机器人沿挂载轨道向目标副轨道运行,以执行相应任务,而母机器人则原地等待或执行下一任务,由调度系统进行调度。
38.当母机器人收回子机器人时,包括:子机器人任务完成后反馈工作状态给调度系统,调度系统下发回收任务给空闲的母机器人;电控系统控制母机器人运行至需要收回子机器人所在的停止点,母机器人读取到定位标签的信息并反馈给调度系统,光电传感器收到信号后停止,此时挂载轨道与副轨道接触对齐;确认轨道对齐后,子机器人向等待的母机器人方向运行,待子机器人完全进入母机器人的挂载轨道后,母机器人携带子机器人执行下一任务或待命。
39.综上所述,本实用新型通过在母机器人的主体上设置挂载轨道,只需将挂载轨道与副轨道对齐,就可使子机器人脱离母机器人顺畅进入副轨道,结构简单,无需设置多余的转载机构,就可完成工作任务;通过设置读卡器和光电传感器,能够通过读卡器读取相应的标签信息来作为母机器人的停止点,再通过光电感应精准定位,实现挂载轨道与副轨道的无缝对接,从而使子机器人顺畅进入副轨道执行任务;通过设置充电板,能够使母机器人在非工作段及时充电,不耽误执行任务的时间,大大提高工作效率;另外,母机器人整体结构紧凑,大大减小占用空间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1