一种摆臂取片机械手的制作方法
1.本实用新型涉及机械手领域技术,尤其是指一种摆臂取片机械手。
背景技术:
2.机械手是一种能模仿人的手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点;就锂电池的生产而言,在生产过程中通常通过取片机械手对正极极片和负极极片进行取片至定位平台,再通过叠片机械手分别将定位台上的正极极片和负极极片进行叠片操作。
3.现有的取片机械手完成从弹夹取片放到二次定位平台的结构主要有:(一)、直线电机直线走位取料模式,即采用伺服电机驱动丝杆进行水平移栽,气缸/伺服电机驱动丝杆进行升降,该种取片方式取料组件的行程长,取料效率低;(二)角度摆臂取片模式,即采用伺服电机驱动摆臂进行z字形取片,但其需配合平衡杆和平衡块来实现平稳运行,平衡块位于固定座的下方,该种结构占用了z轴方向上较大的空间,为该取片机械手的装配带来不便,维护困难。
4.因此,有必要设计一种新的技术方案来解决上述问题。
技术实现要素:
5.有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种摆臂取片机械手,其通过主动摆臂、同步轮组件、从动摆臂、z轴移动模组一同形成平行四边形连杆机构;实现取料组件可以同时进行高度方向和水平方向位移,取料工作效率高;且z轴移动模组的底部高于固定板的底部,结构紧凑,空间利用率高,易于维护。
6.为实现上述目的,本实用新型采用如下之技术方案:
7.一种摆臂取片机械手,包括固定板、旋转驱动机构、摆臂组件和z轴移动模组;其中:
8.所述旋转驱动机构固定于固定板的一侧,所述旋转驱动机构包括旋转驱动装置和连接于旋转驱动装置的同步轮组件,所述同步轮组件设于固定板的另一侧,所述同步轮组件包括上下间距布置的主动同步轮、从动同步轮及套设于主动同步轮、从动同步轮外周侧的同步带,所述主动同步轮连接于旋转驱动装置,所述旋转驱动装置带动主动同步轮旋转;
9.所述摆臂组件包括主动摆臂和从动摆臂,所述主动摆臂和从动摆臂的长度均小于主动同步轮和从动同步轮之间的间距,所述主动摆臂、从动摆臂的一端分别固定于主动同步轮、从动同步轮上,所述主动摆臂、从动摆臂的另一端分别通过第一轴承连接于z轴移动模组的上、下端;所述主动摆臂、同步轮组件、从动摆臂、z轴移动模组一同形成平行四边形连杆机构;
10.所述z轴移动模组的底部高于固定板的底部,结构紧凑,空间利用率高,易于维护;所述z轴移动模组上设有用于取料的取料组件,实现取料组件可以同时进行高度方向和水
平方向位移,取料工作效率高。
11.作为一种优选方案,所述z轴移动模组包括安装板和设于安装板一侧的z轴驱动装置,所述取料组件设于z轴驱动装置上,所述z轴驱动装置带动取料组件沿z轴移动。
12.作为一种优选方案,所述z轴驱动装置为第一伺服电机配合丝杠螺母副的方式。
13.作为一种优选方案,所述旋转驱动装置为第二伺服电机配合减速机的方式,所述第二伺服电机通过减速机连接主动同步轮。
14.作为一种优选方案,在取料状态下,所述主动摆臂、从动摆臂均与固定板呈60度设置且均位于固定板底部的上方。
15.作为一种优选方案,所述主动同步轮和从动同步轮之间设有用于对同步带进行张紧的张紧轮。
16.作为一种优选方案,所述从动同步轮通过第二轴承连接于固定板。
17.作为一种优选方案,所述第二轴承为交叉滚子轴承。
18.作为一种优选方案,所述主动摆臂的第一轴承为交叉滚子轴承。
19.作为一种优选方案,所述从动摆臂的第一轴承为深沟球轴承。
20.本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知:
21.其主要是,通过主动摆臂、同步轮组件、从动摆臂、z轴移动模组一同形成平行四边形连杆机构;实现取料组件可以同时进行高度方向和水平方向位移,取料工作效率高;且z轴移动模组的底部高于固定板的底部,结构紧凑,空间利用率高,易于维护;
22.其次是,驱动均为伺服电机,提高机械手的稳定性能,位移大小均可设计参数调节,操作方便;
23.以及,零部件的加工难度小,成本降低。
24.为更清楚地阐述本实用新型的结构特征和功效,下面结合附图与具体实施例来对本实用新型进行详细说明。
附图说明
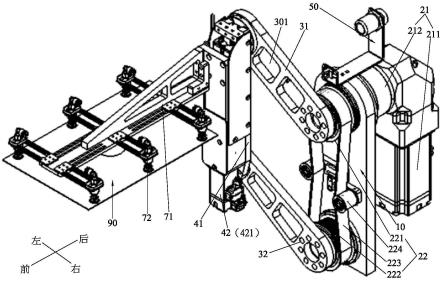
25.图1是本实用新型之较佳实施例的立体示意图;
26.图2是本实用新型之较佳实施例的另一视角的立体示意图;
27.图3是本实用新型之较佳实施例的正视图;
28.图4是本实用新型之较佳实施例的后视图;
29.图5是本实用新型之较佳实施例的侧视图;
30.图6是本实用新型之较佳实施例的主动摆臂摆动示意简图。
31.附图标识说明:
32.10、固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101、安装避让孔
33.20、旋转驱动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、旋转驱动装置
34.211、第二伺服电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212、减速机
35.22、同步轮组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221、主动同步轮
36.222、从动同步轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
223、同步带
37.224、张紧轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30、摆臂组件
38.31、主动摆臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32、从动摆臂
39.301、镂空部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40、z轴移动模组
40.41、安装板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42、z轴驱动装置
41.421、第一伺服电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50、线托架
42.60、第二轴承
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70、取料组件
43.71、吸盘安装架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72、吸盘
44.80、第一轴承
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
90、极片。
具体实施方式
45.请参照图1至图6所示,其显示出了本实用新型之较佳实施例的具体结构,包括固定板10、旋转驱动机构20、摆臂组件30和z轴移动模组40。
46.所述固定板10竖向设置,所述固定板10的上端和下端均开设有安装避让孔101;在本实施例中,所述固定板10的顶部呈半圆状,于半圆状顶部上设有线托架50,方便电机的线绕设。
47.所述旋转驱动机构20固定于固定板10的一侧,所述旋转驱动机构20包括旋转驱动装置21和连接于旋转驱动装置21的同步轮组件22,所述同步轮组件22设于固定板10的另一侧,所述同步轮组件22包括上下间距布置的主动同步轮221、从动同步轮222及套设于主动同步轮221、从动同步轮222外周侧的同步带223,所述主动同步轮221连接于旋转驱动装置21,所述旋转驱动装置21带动主动同步轮221旋转;
48.具体而言,所述旋转驱动装置21为第二伺服电机211配合减速机212的方式,所述第二伺服电机211通过减速机212连接主动同步轮221,所述减速机212位于线托架50的下方,所述减速机212的输出端自固定板10上端的安装避让孔101向前伸出,所述主动同步轮221连接于减速机212的输出端,所述第二伺服电机211位于减速机212的下方;
49.优选的,所述从动同步轮222通过第二轴承60连接于固定板10,所述第二轴承60设于固定板10下端的安装避让孔101处;所述第二轴承优选为交叉滚子轴承;
50.以及,所述主动同步轮221和从动同步轮222之间设有用于对同步带223进行张紧的张紧轮224,所述张紧轮224于同步带223的两侧布置有两个,两个张紧轮224上下错位布置。
51.所述z轴移动模组40的底部高于固定板10的底部,结构紧凑,空间利用率高,易于维护;所述z轴移动模组40上设有用于取料的取料组件70,实现取料组件70可以同时进行高度方向和水平方向位移,取料工作效率高;
52.具体而言,所述z轴移动模组40包括安装板41和设于安装板41一侧的z轴驱动装置42,所述取料组件70设于z轴驱动装置42上,所述z轴驱动装置42带动取料组件70沿z轴移动;优选的,所述z轴驱动装置42为第一伺服电机421配合丝杠螺母副的方式;在本实施例中,所述取料组件70为吸盘组件,所述吸盘组件包括有吸盘安装架71和设于吸盘安装架71的三组吸盘72,三组吸盘72前后间距布置,每组吸盘72均具有两个;所述吸盘安装架72设于安装板41的另一侧。
53.所述摆臂组件30包括主动摆臂31和从动摆臂32,所述主动摆臂31、从动摆臂32的一端分别固定于主动同步轮221、从动同步轮222上,所述主动摆臂31、从动摆臂32的另一端
分别通过第一轴承80连接于z轴移动模组40的上、下端;所述主动摆臂31、同步轮组件22、从动摆臂32、z轴移动模组40一同形成平行四边形连杆机构;所述主动摆臂31和从动摆臂32的长度均小于主动同步轮221和从动同步轮222之间的间距,以使主动摆臂31和从动摆臂32可进行左右摆动;
54.优选的,所述主动摆臂31的第一轴承80为交叉滚子轴承,所述从动摆臂32的第一轴承80为深沟球轴承;所述主动摆臂31和从动摆臂32均设有镂空部301,减轻其重量,减小负重带来的负担;在取料状态下,所述主动摆臂31、从动摆臂32均与固定板10呈60度设置且均位于固定板10底部的上方。
55.详述本实施例的工作原理如下:
56.以锂电池取极片90为例:在取极片90时,会进行一个抖片的动作,防止吸取的电池极片90重叠,通过第一伺服电机421驱动安装板41完成抖片动作;
57.在搬运极片时,主动摆臂31从左60
°
往右摆动120
°
,把极片从弹夹吸取放到二次定位平台,如图6所示,极片在摆动位移过程中,极片最高点位置h,最大水平位移x,极片从弹夹到二次定位平台中,极片最终相对高度未发生改变,从而可以快速把极片进行搬运,而极片的运动方式为水平和垂直方向组合运动方式,更快、更准。
58.本实用新型的设计重点在于:
59.其主要是,通过主动摆臂、同步轮组件、从动摆臂、z轴移动模组一同形成平行四边形连杆机构;实现取料组件可以同时进行高度方向和水平方向位移,取料工作效率高;且z轴移动模组的底部高于固定板的底部,结构紧凑,空间利用率高,易于维护;
60.其次是,驱动均为伺服电机,提高机械手的稳定性能,位移大小均可设计参数调节,操作方便;
61.以及,零部件的加工难度小,成本降低。
62.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型的技术范围作任何限制,故凡是依据本实用新型的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1