一种数控机床刀柄拆卸装置的制作方法
1.本实用新型涉及数控机床配件技术领域,尤其涉及一种数控机床刀柄拆卸装置。
背景技术:
2.数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,通过信息载体输入数控装置。
3.经检索专利号为cn201822230677.0公开了一种一种数控机床刀柄拆卸装置,包括基座,基座的形状为矩形,基座的四角处设有螺纹孔a;基座的顶部中间设有支撑板,支撑板上设有固定板,固定板的中间设有贯通前后的圆形的通孔,通孔中设有轴承,轴承的内环上以轴承中心对称设有卡扣;固定板的前部在通孔旁的以通孔的中心对称设有限位块,限位块上设有朝向通孔的螺纹孔b,螺纹孔b中设有固定螺丝,固定螺丝朝向通孔;支撑板的前部沿中间线设有加强筋,加强筋的上端与固定板的底部相连,加强筋的下端与基座的顶部相连。本实用新型具有结构稳定、操作方便、无需多次拆装即可取下刀柄上所有连接刀具的螺丝,提高了工作效率。
4.但是这样的装置在工作使用中存在,该装置在拆解刀具时受力非常的不稳定,很容易造成螺纹滑丝的情况发生,并且该装置的灵活性较差,不方便根据所拆解的部件来进行转换更换不同的定位方式。
5.因此,有必要提供一种数控机床刀柄拆卸装置解决上述技术问题。
技术实现要素:
6.本实用新型提供一种数控机床刀柄拆卸装置,解决了装置在拆解刀具时受力非常的不稳定,很容易造成螺纹滑丝的情况发生,并且该装置的灵活性较差,不方便根据所拆解的部件来进行转换更换不同的定位方式的问题。
7.为解决上述技术问题,本实用新型提供的一种数控机床刀柄拆卸装置,包括底板,所述底板的顶部固定有安装板,且安装板的数量为两个,两个所述安装板的外壁均固定有支撑板,且支撑板的数量为四个,两个所述安装板的内部均转动连接有转杆,两个所述转杆的相对一侧固定有转板,所述转板的上方安装有上定位机构,所述转板的下方安装有下定位机构,其中一个所述转杆的外壁螺纹连接有螺栓。
8.优选的,所述上定位机构包括固定于转板上表面的定位板、螺柱与第一卡环,所述定位板的内部开设有衔接槽,所述衔接槽的内部设有卡销,所述卡销的外壁固定有卡板,所述卡板的内部开设有限位槽,所述螺柱的外壁套设有弹簧,所述第一卡环的上表面固定有安装座,且安装座的数量为四个,四个所述安装座的内部均安装有夹板。
9.优选的,四个所述安装座均关于第一卡环的轴心处环形等距分布,四个所述夹板的两端均通过轴承与四个所述安装座相连接。
10.优选的,所述螺柱的顶端贯穿于限位槽的内部,所述卡板通过弹簧与转板之间构
成弹性复位结构。
11.优选的,所述下定位机构包括固定于转板下表面的第二卡环,所述第二卡环的内部螺纹连接有螺杆,且螺杆的数量为四个,四个所述螺杆的前端均固定有胶块。
12.优选的,四个所述螺杆均关于第二卡环的轴心处环形等距分布。
13.与相关技术相比较,本实用新型提供的一种数控机床刀柄拆卸装置具有如下有益效果:
14.对本装置设计有上定位机构,通过四个夹板对刀柄的外壁进行贴合,贴合完成后用户需要在定位板上滑动卡板使其卡板的底部与刀柄的外壁上表面进行贴合,贴合完成后用户需要在螺柱上插入螺母进行旋转使得卡板下降对刀柄进行受力夹紧,这样不但便于进行均匀受力,还可以对不同大小的刀柄进行定位,并且还设计有下定位机构,通过在安装板内旋转转板来控制上定位机构和下定位机构的朝向,这样的设计不但可以对拉钉进行拆解,还便于用户进行更换不同的定位方式。
附图说明
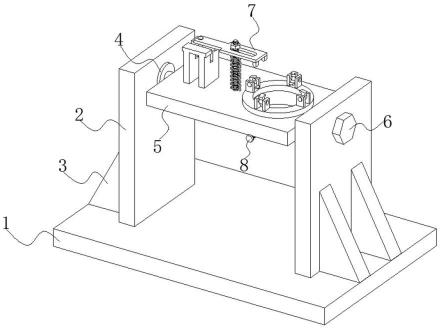
15.图1为本实用新型提供的一种数控机床刀柄拆卸装置的一种较佳实施例的结构示意图;
16.图2为图1所示上定位机构结构示意图;
17.图3为图1所示下定位机构结构示意图。
18.图中标号:1、底板;2、安装板;3、支撑板;4、转杆;5、转板;6、螺栓;7、上定位机构;71、定位板;72、螺柱;73、第一卡环;74、衔接槽;75、卡销;76、卡板;77、限位槽;78、弹簧;79、安装座;710、夹板;8、下定位机构;81、第二卡环;82、螺杆;83、胶块。
具体实施方式
19.下面结合附图和实施方式对本实用新型作进一步说明。
20.请结合参阅图1至图3,其中,图1为本实用新型提供的一种数控机床刀柄拆卸装置的一种较佳实施例的结构示意图;图2为图1所示上定位机构结构示意图;图3为图1所示下定位机构结构示意图。一种数控机床刀柄拆卸装置,包括底板1,底板1的顶部固定有安装板2,且安装板2的数量为两个,两个安装板2的外壁均固定有支撑板3,且支撑板3的数量为四个,两个安装板2的内部均转动连接有转杆4,两个转杆4的相对一侧固定有转板5,转板5的上方安装有上定位机构7,转板5的下方安装有下定位机构8,其中一个转杆4的外壁螺纹连接有螺栓6。
21.上定位机构7包括固定于转板5上表面的定位板71、螺柱72与第一卡环73,定位板71的内部开设有衔接槽74,衔接槽74的内部设有卡销75,卡销75的外壁固定有卡板76,卡板76的内部开设有限位槽77,螺柱72的外壁套设有弹簧78,第一卡环73的上表面固定有安装座79,且安装座79的数量为四个,四个安装座79的内部均安装有夹板710。
22.四个安装座79均关于第一卡环73的轴心处环形等距分布,四个夹板710的两端均通过轴承与四个安装座79相连接,通过四个夹板710对刀柄的外壁进行贴合,贴合完成后用户需要在定位板71上滑动卡板76使其卡板76的底部与刀柄的外壁上表面进行贴合,贴合完成后用户需要在螺柱72上插入螺母进行旋转使得卡板76下降对刀柄进行受力夹紧,这样不
但便于进行均匀受力,还可以对不同大小的刀柄进行定位。
23.螺柱72的顶端贯穿于限位槽77的内部,卡板76通过弹簧78与转板5之间构成弹性复位结构。
24.下定位机构8包括固定于转板5下表面的第二卡环81,第二卡环81的内部螺纹连接有螺杆82,且螺杆82的数量为四个,四个螺杆82的前端均固定有胶块83。
25.四个螺杆82均关于第二卡环81的轴心处环形等距分布,通过在安装板2内旋转转板5来控制上定位机构7和下定位机构8的朝向,这样的设计不但可以对拉钉进行拆解,还便于用户进行更换不同的定位方式。
26.本实用新型提供的一种数控机床刀柄拆卸装置的工作原理如下:
27.第一步:当用户需要对铣床的刀柄上的刀具进行拆解时用户可以直接把刀柄插入到第一卡环73内,先使得四个夹板710对刀柄的外壁进行贴合,贴合完成后用户需要在定位板71上滑动卡板76使其卡板76的底部与刀柄的外壁上表面进行贴合,贴合完成后用户需要在螺柱72上插入螺母进行旋转使得卡板76下降对刀柄进行受力夹紧,这样便可以进行拆解定位。
28.第二步:当用户需要对刀柄尾部的拉钉进行拆解时,用户可旋转转板5使得下定位机构8朝上,然后旋转螺栓6使得转板5与安装板2进行紧固安装。
29.第三步:用户可直接板刀柄的尾部插入到第二卡环81内,然后依次旋转螺杆82使得胶块83前进对刀柄的外壁进行紧固定位,这样即可对拉钉进行拆解定位。
30.与相关技术相比较,本实用新型提供的一种数控机床刀柄拆卸装置具有如下有益效果:
31.对本装置设计有上定位机构7,通过四个夹板710对刀柄的外壁进行贴合,贴合完成后用户需要在定位板71上滑动卡板76使其卡板76的底部与刀柄的外壁上表面进行贴合,贴合完成后用户需要在螺柱72上插入螺母进行旋转使得卡板76下降对刀柄进行受力夹紧,这样不但便于进行均匀受力,还可以对不同大小的刀柄进行定位,并且还设计有下定位机构8,通过在安装板2内旋转转板5来控制上定位机构7和下定位机构8的朝向,这样的设计不但可以对拉钉进行拆解,还便于用户进行更换不同的定位方式。
32.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1