一种用于加工笔记本电脑的旋转工作台的制作方法
1.本实用新型涉及笔记本加工领域,特别涉及一种用于加工笔记本电脑的旋转工作台。
背景技术:
2.平板电脑也叫便携式电脑,是一种小型、方便携带的个人电脑,以触摸屏作为基本的输入设备。平板电脑主要由电池、机身外壳、主板和主要设备、键盘鼠标、显示器外壳、显示器液晶层、外壳覆膜几部分组成。
3.现有的平板电脑加工工艺大都采用智能机器人换人替代人工流水线式操作,但还有一些加工工艺采用人工手动完成,如键盘的铆钉摆放,该工作目前还只能由人工操作完成。现有操作方式是将待放置铆钉的键盘放置在工作台上,人工摆放完铆钉后堆放在一起,然后再送至下一道加工工序。这种传统的方式也存在工作效率低下,工人劳动强度高,制作成本高的问题。而现有的旋转工作台单独运行,与前、后加工工艺未进行连接,导致前后加工工艺不能进行有效协调,工作效率低。
技术实现要素:
4.本实用新型的目的是针对现有技术的不足,提供一种用于加工笔记本电脑的旋转工作台,能够自动将待加工工件送至下一工序进行加工处理,减小劳动强度,提高工作效率,降低生产成本。
5.本实用新型的技术方案是:
6.一种用于加工笔记本电脑的旋转工作台,包括旋转工作台、控制器及位置传感器,所述旋转工作台上设有多个用于放置待加工工件的定位装置和用于盛装零件的容器盒,多个定位装置沿所述旋转工作台周向均匀分布,各定位装置之间留有间距;所述控制器设置在旋转工作台的下端面,所述控制器与所述旋转工作台的旋转电机电连接,用于控制所述旋转电机转向及转速,所述位置传感器设置在所述旋转工作台的定位装置上,所述位置传感器与所述控制器电连接,所述位置传感器用于采集旋转工作台上定位装置的位置信号并发送至控制器;所述控制器还设有第一信号接口和第二信号接口,所述第一信号接口用于与加工机床的控制系统电连接,所述第二信号接口用于与机器人手臂的控制系统电连接,所述控制器用于根据加工机床的控制系统发送的加工信号控制所述旋转工作台的旋转电机转动,从而带动定位装置转动至预设位置,同时将定位装置的位置信息发送至机器人手臂的控制系统。
7.进一步地,所述控制器的第二接口依次电连接有继电器和电磁阀,所述控制器通过继电器和电磁阀用于与机器人手臂的控制系统电连接。
8.进一步地,所述旋转工作台包括机架、旋转电机和转台,所述转台设置在所述机架上端面,所述旋转电机设置在机架的下端面,所述旋转电机通过转轴与所述转台相连,所述定位装置设置在所述转台上端面,所述容器盒通过支架设置在所述机架上。
9.进一步地,所述容器盒的下端面设有与所述支架滑动配合的条形槽,所述容器盒通过条形槽活动安装在所述支架上。
10.进一步地,所述机架的下端设有控制箱,所述控制箱的底部设有支撑板,所述控制器设置在所述控制箱内。
11.进一步地,所述支撑板的下端设有升降支脚。
12.进一步地,所述定位装置包括定位板和多个定位块,所述定位板通过螺栓固定在所述旋转工作台上,所述定位板上设有与所述定位块数量相同的螺杆,各所述定位块安装有导向板,所述导向板内设有与所述螺杆间隙配合的条形孔,所述定位块通过导向板的条形孔与螺杆相配合活动安装在所述定位板上。
13.进一步地,所述定位板的四周均设有调节板,各所述调节板上均设有若干个螺纹孔,所述螺杆与所述调节板的螺纹孔相配合安装在所述定位板上。
14.进一步地,所述定位块呈上小下大的锥形结构。
15.进一步地,所述旋转工作台上设有六个定位装置。
16.采用上述技术方案具有以下有益效果:
17.本实用新型结构简单,本旋转工作台设置在两道加工工序之间,利用用于盛装零件的容器盒,便于快速将零件放置在旋转工作台的待加工工件上,减小了劳动强度,降低了生产成本。控制器与加工机床的控制系统电连接和机器人手臂的控制系统电连接,根据加工机床的控制系统发送的加工信号控制所述旋转工作台的旋转电机转动,从而带动定位装置转动至预设位置,同时将定位装置的位置信息发送至机器人手臂的控制系统,全过程实现了自动化操作,提高了工作效率高。
18.所述定位装置包括定位板和多个定位块,所述定位板通过螺栓固定在所述旋转工作台上,所述定位板上设有与所述定位块数量相同的螺杆,各所述定位块安装有导向板,所述导向板内设有与所述螺杆间隙配合的条形孔,所述定位块通过导向板的条形孔与螺杆相配合活动安装在所述定位板上。实现了不同待加工工件位置灵活调整,以适用更多不同尺寸的待加工工件。
19.所述定位板的四周均设有调节板,各所述调节板上均设有若干个螺纹孔,所述螺杆与所述调节板的螺纹孔相配合安装在所述定位板上,增加了定位块的调节范围。
20.所述定位块呈上小下大的锥形结构,该结构便于将待加工工件防止在各定位块之间。
21.所述机架的下端还设有升降支脚,所述升级支脚用于提升机架的高度。
22.与下面结合附图和具体实施方式作进一步的说明。
附图说明
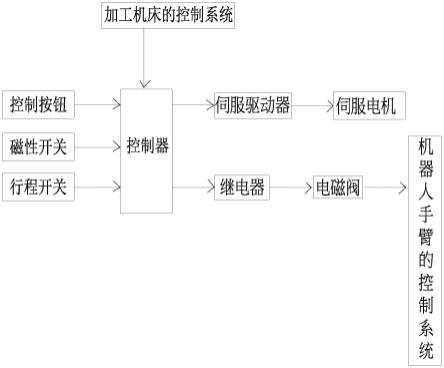
23.图1为具体实施例1电路原理图;
24.图2为具体实施例1旋转工作台的结构示意图:
25.图3为图2的正视图;
26.图4为图2的俯视图;
27.图5为图4上设置定位装置的结构示意图;
28.图6为图5的a处放大示意图;
29.图7为容器盒的结构示意图。
30.附图中,1为机架、2为转台、3为定位装置、3-1为定位板、3-2为定位块、3-3为调节板、3-4为螺杆、3-5为导向板、3-6为螺纹孔、4为控制箱、5为支撑板、6为容器盒、6-1为条形槽、7为升降支脚。
具体实施方式
31.具体实施例1:
32.参见图1至图7所示,一种用于加工笔记本电脑的旋转工作台,包括旋转工作台、控制器及位置传感器,所述旋转工作台包括机架1、旋转电机和转台2,所述转台2设置在所述机架1上端面,所述旋转电机设置在机架1的下端面,所述电机采用伺服电机,所述旋转电机通过转轴与所述转台2相连。所述旋转工作台上设有多个用于放置待加工工件的定位装置3和用于盛装零件的容器盒 6,多个定位装置3沿所述旋转工作台周向均匀分布,各定位装置3之间留有间距。
33.所述控制器设置在旋转工作台的下端面,所述机架1的下端设有控制箱4,所述控制箱4的底部设有支撑板5,所述支撑板5的下端设有升降支脚7,支撑板5 的四只脚分别设有升降支脚7,所述升降支脚7采用现有升降支架结构。通过升降支脚7可以抬高转台2的高度,从而便于根据需要灵活调节转台2的高度。
34.所述控制器设置在所述控制箱4内,所述控制器为plc控制器,所述控制器设置在所述控制箱4内,所述控制箱4内设置用于供电的电源、磁性开关、行程开关和控制按钮,所述磁性开关、行程开关和控制按钮与控制器的输入端电连接,所述控制按钮包括急停按钮、回原点按钮等。所述控制器通过伺服电动器与所述旋转工作台的旋转电机电连接,用于控制所述旋转电机按顺时针或者逆时针方向转动及转速。所述位置传感器设置在所述旋转工作台的定位装置3 上,所述位置传感器采用磁性开关、行程开关,本具体实施例,设置六个位置传感器,各位置传感器均与所述控制器电连接,所述位置传感器用于采集旋转工作台上定位装置3的位置信号并发送至控制器;所述控制器还设有第一信号接口和第二信号接口,所述第一信号接口用于与加工机床的控制系统电连接,所述第二信号接口用于与机器人手臂的控制系统电连接,所述控制器用于根据加工机床的控制系统发送的加工信号控制所述旋转工作台的旋转电机转动,从而带动定位装置3转动至预设位置,同时将定位装置3的位置信息发送至机器人手臂的控制系统。本具体实施例中:所述控制器的第二接口依次电连接有继电器和电磁阀,所述控制器通过继电器和电磁阀用于与机器人手臂的控制系统电连接。
35.可能地,所述控制器的输出端还电连接有报警器,所述报警器用于当控制器采集的信号出现异常情况时发出报警提示。
36.可能地,所述控制箱4内还设有扇热风扇,所述扇热风扇与控制器是输出端电连接,用于控制箱4内扇热降低控制箱4内各电器元件温度,确保正常运行。
37.所述定位装置3设置在所述转台2上端面。所述定位装置3包括定位板3-1 和多个定位块3-2,所述定位板3-1通过螺栓固定在转台2上,所述定位板3-1 上设有与所述定位块3-2数量相同的螺杆3-4,所述定位板3-1的四周均设有调节板3-3,各调节板3-3上均设有若干个螺纹孔3-6,螺杆3-4与调节板3-3的螺纹孔3-6相配合安装在定位板3-1上。定位块3-2
呈上小下大的锥形结构,便于冲压工件落料放置在各定位块3-2之间。各定位块3-2安装有导向板3-5,导向板3-5内开设有与所述螺杆3-4间隙配合的条形孔,各定位块3-2分别设置在所述定位板3-1上,定位块3-2的导向板3-5与螺杆3-4相配合,螺杆3-4 上端设有螺母,定位块3-2通过拧紧螺杆3-4上的螺母活动安装在所述定位板 3-1上。本具体实施例中:转台2上设有六个用于待加工工件的定位装置3,各定位装置3包括一块定位板3-1和十二块定位块3-2,所述定位板3-1上设有十二根螺杆3-4,定位板3-1的四周分别设置一根调节板3-3,每根调节板3-3上安装两根螺杆3-4,每个螺杆3-4上配置一个定位块3-2,即每侧通过两个定位块3-2能够提高定位效果。十二块定位块3-2分别通过导向板3-5套设在每根螺杆3-4上,通过调节导向板3-5与螺杆3-4的位置从而调节定位块3-2的位置,然后通过在螺杆3-4上端设置螺母,利用螺母与螺杆3-4相配合压紧导向板3-5,该结构便于根据不同待加工工件的尺寸大小调整定位块3-2的位置,从而不用更换其他的定位装置3,降低了成本,提高了使用价值。
38.所述容器盒6通过支架设置在所述机架1上,所述容器盒6的下端面设有与所述支架滑动配合的条形槽6-1,所述容器盒6通过条形槽6-1活动安装在所述支架上,可以根据加工零部件不同,更换用于盛装不同零部件的容器盒6,扩大了适用范围,若需要加工电脑键盘的铆钉,将铆钉盒放置在支架上,利用待加工电脑键盘在转台2上依次主动的间歇,人工操作对转台2上的待加工电脑键盘进行铆钉摆放。
39.本实用新型的工作原理:用于加工笔记本电脑的旋转工作台设置在前后两道加工机构之间,因不同加工工序时间消耗不同,前后两道加工工序不一定同步完成,因此可以利用用于加工笔记本电脑的旋转工作台来暂存放置待加工工件,对待加工工件进行人工操作,减小了劳动强度,减少人员设置,从而降低了生产成本。并且通过转台2转动将待加工工件有序沿转台2转动,便于设置在两道加工机构之间的机器人手臂取件、放件。进一步地,根据加工机床的控制系统发送的加工信号发送至控制器控制所述旋转工作台的旋转电机转动,从而带动定位装置3转动至预设位置,同时将定位装置3的位置信息发送至机器人手臂的控制系统,实现了加工机床、旋转工作台和机器人手臂三者之间的有序自动操作,不仅能提高取件、放件的精度,而且提高了工作效率,实现了人工智能化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1