一种机房巡检机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种机房巡检机器人。
背景技术:
2.随着信息时代的发展,面对机房中的大量机柜以及高要求的工作环境,使用机房巡检机器人不仅能减少运维人员的工作量、节省工作时间、提高工作效率,还能提供全天24小时不间断的巡检,于是使用智能化设备对机房定期巡检显得尤为重要。
3.公告号cn214560951u的授权文件公布了一种机房巡检机器人,行走轨道上布置触滑线,滑触线供电单元模块通过集电器滑触取电;轨道上悬挂轨道小车,轨道小车内装有行走直流电机驱动器、第一直流电机、第一编码器、升降电机驱动器、第二直流电机、第二编码器、声光报警器、碰撞单元模块、控制器、无线通信模块;升降机构固定于轨道小车下部,其下端安装有可见光与热成像集成的双光谱摄像模块、音频分析模块;无线通信模块与热成像双光谱模块、控制器、音频分析模块连接实现与远程控制终端信息交换。本实用新型将机器人技术与监测技术有机结合,稳定可靠,提高运维工作效率。
4.该种机房巡检机器人存在如下问题:
5.1.机房巡检机器人和行走轨道连接的结构复杂,维护检修不易;
6.2.机房巡检机器人没有设置后备电源,无法应对外接线路故障等意外情况;
7.3.机房巡检机器人上的二氧化碳浓度传感器、温湿度传感器、一氧化碳浓度传感器、甲烷浓度传感器、烟雾报警器、(no2、so2、o2、h2s、sf6、h2)浓度传感器不易更换;
8.因此需要一种机房巡检机器人,用以解决上述提出的问题。
技术实现要素:
9.本实用新型的目的是为了解决现有技术中存在机房巡检机器人维护或更换不易,没有设置后备电源、传感器未设置成可更换模块的缺点,而提出的一种机房巡检机器人。
10.为了实现上述目的,本实用新型采用了如下技术方案:
11.一种机房巡检机器人,包括行走轨道,所述行走轨道上滑动连接有轨道小车,轨道小车用来沿行走轨道进行运动,所述轨道小车两侧分别固定连接有第二卡扣和第一卡扣,所述第一卡扣上搭扣连接有第一卡头,所述第二卡扣上搭扣连接有第二卡头,所述第一卡头和第二卡头上均滑动连接有机器主体,第二卡扣和第一卡扣均用来卡装连接机器主体和轨道小车,所述机器主体顶端固定设置有备用电池,备用电池用来当临时电源应急,且机器主体底端固定连接有升降机构,所述升降机构底端转动连接有连接底座,所述连接底座上固定连接有一号t型卡头,所述一号t型卡头上卡装连接有一号t型卡槽,所述一号t型卡槽上固定连接有卡槽架,所述卡槽架上固定连接有六个二号t型卡头,所述二号t型卡头上卡装连接有六个二号t型卡槽,卡槽架用来卡装六个传感器。
12.优选的,所述第一卡扣内侧开设有引导槽,所述第一卡扣和第二卡扣完全相同。
13.优选的,所述第一卡头和第二卡头上均固定连接有限位块,所述限位块上固定连
接有弹簧,所述机器主体和弹簧固定连接。
14.优选的,所述卡槽架上螺纹连接有三个螺栓,三个所述螺栓上固定连接有限位条。
15.优选的,所述轨道小车上开设有usb接口,所述机器主体上设置有usb接头,所述机器主体上的usb接口和轨道小车上的usb接头配套使用。
16.优选的,所述备用电池和机器主体电性连接。
17.本实用新型中,所述一种机房巡检机器人通过轨道小车和机器主体间设置的第一卡扣和第二卡扣相互连接,当拆卸时首先关闭电源,然后拔掉usb接头,两手按住第二卡扣和第一卡扣用力按到底,接着就可以向下拿走该种机房巡检机器人的机器主体进行维护或更换,十分快捷方便,且安装复位时直接用力上推复位插上usb接头即可,非常容易操作,当机房巡检机器人上的二氧化碳浓度传感器、温湿度传感器、一氧化碳浓度传感器、甲烷浓度传感器、烟雾报警器、(no2、so2、o2、h2s、sf6、h2)浓度传感器等个别失灵或损坏后,可直接把卡槽架向上顺着一号t型卡头取下,然后把损坏的传感器所在位置上的螺栓拧动,使限位条挪开限制,接着沿着卡槽架上二号t型卡槽的方向滑动传感器,取下进行更换,最后重复之前操作进行复位即可,使用体验良好;
18.当外部突然断电时,因为机器主体顶端固定设置有备用电池,且备用电池和机器主体上的usb线路串联,所以备用电池可以充当临时电源无延迟供电,方便应对意外情况;
19.本实用新型具有维护检修便捷,机房巡检机器人和行走轨道连接结构简单实用,设置有后备电源,有应对外接线路故障等意外情况的能力;传感器设置成可更换模块,更换快捷方便,使用效果良好的优点。
附图说明
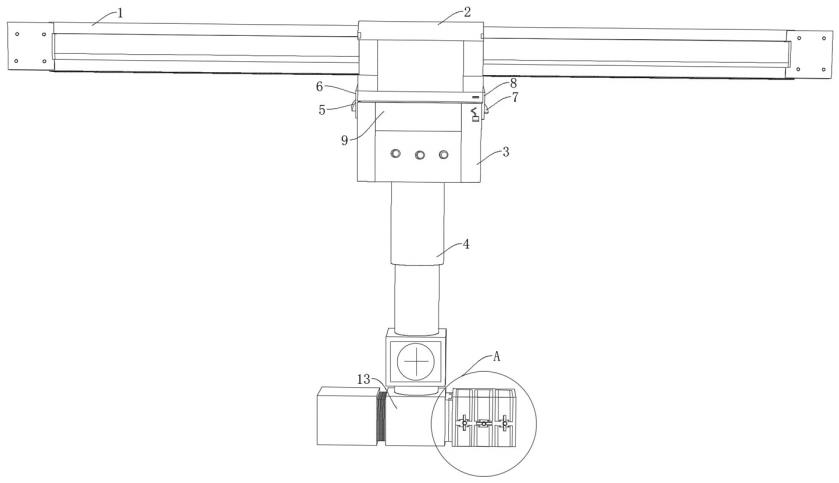
20.图1为本实用新型提出的一种机房巡检机器人的立体结构示意图;
21.图2为本实用新型提出的一种机房巡检机器人的图1上a部分放大结构示意图;
22.图3为本实用新型提出的一种机房巡检机器人的机器主体局部平面结构示意图;
23.图4为本实用新型提出的一种机房巡检机器人的第一卡扣内侧结构示意图。
24.图中:1、行走轨道;2、轨道小车;3、机器主体;4、升降机构;5、第一卡头;6、第一卡扣;7、第二卡头;8、第二卡扣;9、备用电池;10、卡槽架;11、一号t型卡槽;12、一号t型卡头;13、连接底座;14、限位块;15、引导槽;16、限位条;17、螺栓;18、二号t型卡槽;19、二号t型卡头。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
26.实施例一
27.参照图1-4,一种机房巡检机器人,包括行走轨道1,行走轨道1上滑动连接有轨道小车2,轨道小车2用来沿行走轨道1进行运动,轨道小车2两侧分别固定连接有第二卡扣8和第一卡扣6,第一卡扣6上搭扣连接有第一卡头5,第二卡扣8上搭扣连接有第二卡头7,第一卡头5和第二卡头7上均滑动连接有机器主体3,第二卡扣8和第一卡扣6均用来卡装连接机
器主体3和轨道小车2,机器主体3顶端固定设置有备用电池9,备用电池9用来当临时电源应急,且机器主体3底端固定连接有升降机构4,升降机构4底端转动连接有连接底座13,连接底座13上固定连接有一号t型卡头12,一号t型卡头12上卡装连接有一号t型卡槽11,一号t型卡槽11上固定连接有卡槽架10,卡槽架10上固定连接有六个二号t型卡头19,二号t型卡头19上卡装连接有六个二号t型卡槽18,卡槽架10用来卡装六个传感器。
28.实施例二
29.一种机房巡检机器人,包括行走轨道1,行走轨道1上滑动连接有轨道小车2,轨道小车2用来沿行走轨道1进行运动,轨道小车2两侧分别固定连接有第二卡扣8和第一卡扣6,第一卡扣6上搭扣连接有第一卡头5,第一卡扣6内侧开设有引导槽15,第一卡扣6和第二卡扣8完全相同,第二卡扣8上搭扣连接有第二卡头7,第一卡头5和第二卡头7上均滑动连接有机器主体3,第一卡头5和第二卡头7上均固定连接有限位块14,限位块14上固定连接有弹簧,机器主体3和弹簧固定连接,第二卡扣8和第一卡扣6均用来卡装连接机器主体3和轨道小车2,轨道小车2上开设有usb接口,机器主体3上设置有usb接头,机器主体3上的usb接口和轨道小车2上的usb接头配套使用,机器主体3顶端固定设置有备用电池9,备用电池9和机器主体3电性连接,备用电池9用来当临时电源应急,且机器主体3底端固定连接有升降机构4,升降机构4底端转动连接有连接底座13,连接底座13上固定连接有一号t型卡头12,一号t型卡头12上卡装连接有一号t型卡槽11,一号t型卡槽11上固定连接有卡槽架10,卡槽架10上固定连接有六个二号t型卡头19,卡槽架10上螺纹连接有三个螺栓17,三个螺栓17上固定连接有限位条16,二号t型卡头19上卡装连接有六个二号t型卡槽18,卡槽架10用来卡装六个传感器。
30.本实用新型中,使用时首先接通电源,然后开启开关,然后机房巡检机器人开始沿着行走轨道1巡检工作,当外部突然断电时,因为机器主体3顶端固定设置有备用电池9,且备用电池9和机器主体3上的usb线路串联,所以备用电池9可以充当临时电源无延迟供电,可以从容处理意外情况,且减少了机器人因突然断电而损坏的概率;当需要保养维护时,因为机房巡检机器人通过轨道小车2和机器主体3间设置的第一卡扣6和第二卡扣8相互连接,首先关闭电源,然后拔掉usb接头,两手按住第二卡扣8和第一卡扣6用力按到底,接着就可以向下拿走该种机房巡检机器人的机器主体3进行维护或更换,且安装复位时直接用力上推机器主体3复位插上usb接头即可,当机房巡检机器人上的二氧化碳浓度传感器、温湿度传感器、一氧化碳浓度传感器、甲烷浓度传感器、烟雾报警器、(no2、so2、o2、h2s、sf6、h2)浓度传感器等个别失灵或损坏后,可直接把卡槽架10向上顺着一号t型卡头12取下,然后把损坏的传感器所在位置上的螺栓17拧动,使限位条16挪开限制,接着沿着卡槽架10上二号t型卡槽18的方向滑动传感器,取下进行更换,最后重复之前操作进行复位即可。
31.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1