用于撑开橡胶套的装置的制作方法
1.本实用新型属于线束装配技术领域,具体涉及一种用于撑开橡胶套的装置。
背景技术:
2.随着家电行业产品多样性的不断提升,各种家电设备的性能越来越丰富,随之而来的是其内部的结构越来越复杂。家电内部的各电子元件之间通常采用线束进行电性连接,因而,在家电行业中,线束扮演者非常重要的角色。随着家电设备内部结构的复杂化,其中的线束情况也变得越来越复杂,为了更合理的进行集中布线,同时,也为了后期维修的方便,往往需要利用橡胶套将多根线束套装在一起。在现有技术中,用于束线的橡胶套具有一定的弹性变形能力,其孔径较小,当需要有较多根线束穿过时,会出现穿线困难的情况,这时,往往需要将其孔径撑大,再进行穿线作业。传统的作业过程中,往往采用人工手动撑开的方式,在这种方式中,由于撑开和穿线过程均为手动操作,不仅穿线的效率低,而且往往还需要多人协同作业,这造成了人力成本的浪费,同时,其劳动强度也较大,不利于作业人员的长时间作业。
技术实现要素:
3.针对上述现有技术存在的问题,本实用新型提供一种用于撑开橡胶套的装置,该装置能便捷的实现橡胶套的撑开作业,能有效提高穿线效率,同时,能有利于节省人力成本,并可降低作业人员的劳动强度。
4.为了实现上述发明目的,本实用新型提供一种用于撑开橡胶套的装置,包括机架、张开爪、气缸和电磁阀和开关s1;所述机架的顶部安装有水平的支撑板;
5.所述支撑板的中心区域开设有纵向槽和横向槽,纵向槽和横向槽呈十字形分布,形成十字形滑槽;
6.所述张开爪的数量为四个,四个张开爪呈十字形的安装在十字形滑槽中,其四个张开爪的下端均位于支撑板的下方;张开爪为板式结构,其由位于上端的宽板段、位于中部的过渡段和位于下端的条形段组成,且其靠近十字形滑槽中心的内边沿为竖直边沿;位于纵向槽中的两个张开爪分别与纵向槽的前部滑槽和后部滑槽滑动配合;位于横向槽中的两个张开爪分别与横向槽的左部滑槽和右部滑槽滑动配合;
7.所述气缸为弹簧复位式气缸,其设置在支撑板的上方,其数量为四个,且呈十字形的分别位于四个张开爪的外侧;气缸的缸筒通过连接座与支撑板的上端固定连接,其活塞杆与对应张开爪的宽板段固定连接;
8.所述电磁阀的b口分别与四个气缸的无杆腔气口连接,其p口与高压气源连接,其a口、r口和s口均与外部大气连通;
9.所述开关s1的一端与电磁阀的一个电源连接端连接,其另一端通过电源与电磁阀的另一个电源连接端连接。
10.作为一种优选,所述电磁阀为两位五通电磁换向阀,其失电后工作在左位,其p口
与a口之间的气路连通,其b口与s口之间的气路连通,其得电后工作在右位,其a口与r口之间的气路连通,其p口与b口之间的气路连通。
11.作为一种优选,所述电源为直流电源。
12.进一步,为了方便装配和分离,还包括y型接头,所述y型接头的数量为四个;所述宽板段的沿宽度方向开设有两个安装孔,且每个y型接头的一端与一个气缸的活塞杆端通过螺纹配合固定连接,每个y型接头的另一端套设在对应张开爪的宽板段的外部,并通过穿过两个安装孔的连接螺栓与宽板段连接。
13.本实用新型中,使四个板式结构的张开爪呈十字形的滑动装配于十字形滑槽中,并使每个张开爪与位于其外侧的气缸连接,这样,便能通过四个气缸的同步动作来驱动四个张开爪在十字形滑槽中的相互靠近和相互远离动作,由于张开爪的下端为条形段,这样,在四个张开爪相互贴合的状态下,便可以将橡胶套直接套入四个条形段的外部,然后通过同步驱动四个张开爪相互远离便可以将橡胶套自动的撑开,从而便于完成多根线束的穿线作业。该装置能便捷的实现橡胶套的撑开作业,能有效提高穿线效率,同时,有利于节省人力成本,并可降低作业人员的劳动强度。
附图说明
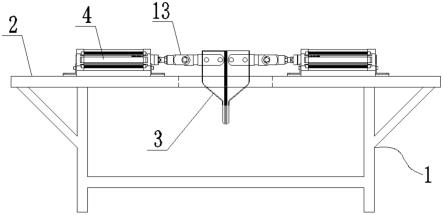
14.图1是本实用新型的结构示意图;
15.图2是本实用新型中支撑板的结构示意图;
16.图3是本实用新型中张开爪的结构示意图;
17.图4是本实用新型中四个张开爪与橡胶套相配合的状态示意图;
18.图5是本实用新型中电磁阀与气缸的气路电路原理图。
19.图中:1、机架,2、支撑板,3、张开爪,4、气缸,5、电磁阀,6、纵向槽,7、横向槽,8、竖直段,9、宽板段,10、过渡段,11、条形段,12、安装孔,13、y型接头,14、橡胶套。
具体实施方式
20.下面结合附图对本实用新型作进一步说明。
21.如图1至图5所示,一种用于撑开橡胶套的装置,包括机架1、张开爪3、气缸4和电磁阀5和开关s1;所述机架1的顶部安装有水平的支撑板2;
22.所述支撑板2的中心区域开设有纵向槽6和横向槽7,纵向槽6和横向槽7相互垂直的设置,且中心相重合,从而呈十字形分布,形成十字形滑槽;
23.所述张开爪3的数量为四个,四个张开爪3呈十字形的安装在十字形滑槽中,其四个张开爪3的下端均位于支撑板2的下方;张开爪3为板式结构,其由位于上端的宽板段9、位于中部的过渡段10和位于下端的条形段11组成,且其靠近十字形滑槽中心的内边沿为竖直边沿8;位于纵向槽6中的两个张开爪3分别与纵向槽6的前部滑槽和后部滑槽滑动配合;位于横向槽7中的两个张开爪3分别与横向槽7的左部滑槽和右部滑槽滑动配合;
24.所述气缸4为弹簧复位式气缸,其设置在支撑板2的上方,其数量为四个,且呈十字形的分别位于四个张开爪3的外侧;气缸4的缸筒通过连接座与支撑板2的上端固定连接,其活塞杆与对应张开爪3的宽板段9固定连接,从而可以通过伸缩来带动张开爪3在对应滑槽中移动;
25.所述电磁阀5的b口分别与四个气缸4的无杆腔气口连接,其p口与高压气源连接,其a口、r口和s口均与外部大气连通;
26.所述开关s1的一端与电磁阀5的一个电源连接端连接,其另一端通过电源与电磁阀5的另一个电源连接端连接。
27.作为一种优选,所述电磁阀5为两位五通电磁换向阀,其失电后工作在左位,其p口与a口之间的气路连通,其b口与s口之间的气路连通,其得电后工作在右位,其a口与r口之间的气路连通,其p口与b口之间的气路连通。
28.作为一种优选,所述电源为直流电源。
29.为了方便装配和分离,还包括y型接头13,所述y型接头13的数量为四个;所述宽板段9的沿宽度方向开设有两个安装孔12,且每个y型接头13的一端与一个气缸4的活塞杆端通过螺纹配合固定连接,每个y型接头13的另一端对应两个安装孔12的开设有两对通孔,且套设在对应张开爪3的宽板段9的外部,并通过穿过两个安装孔12的连接螺栓与宽板段9连接。
30.使四个板式结构的张开爪呈十字形的滑动装配于十字形滑槽中,并使每个张开爪与位于其外侧的气缸连接,这样,便能通过四个气缸的同步动作来驱动四个张开爪在十字形滑槽中的相互靠近和相互远离动作,由于张开爪的下端为条形段,这样,在四个张开爪相互贴合的状态下,便可以将橡胶套直接套入四个条形段的外部,然后通过同步驱动四个张开爪相互远离便可以将橡胶套自动的撑开,从而便于完成多根线束的穿线作业。该装置能便捷的实现橡胶套的撑开作业,能有效提高穿线效率,同时,有利于节省人力成本,并可降低作业人员的劳动强度。
31.使用方法:按下开关s1,接通电磁阀5的电源,电磁阀5得电后工作在右位,其a口与r口之间的气路连通,其p口与b口之间的气路连通,这样,高压气源便由p口和b口之间的气路同时进入四个气缸4的无杆腔中,进而将其活塞杆向外部伸出,这样,便可以通过气缸4活塞杆的伸出来使四个张开爪3相互靠近,直至达到相互贴合的状态时断开高压气源。此时,四个张开爪3的条形段11贴合在一起,且尺寸与橡胶套14的孔径相适配,先将橡胶套14套入四个条形段11的外部,再断开开关s1,电磁阀5的电源断开,其失电后工作在左位,其p口与a口之间的气路连通,其b口与s口之间的气路连通,这样,气缸4无杆腔中的高压气体便由b口和s口之间的通路排入大气中,在弹簧的作用下,气缸4的活塞杆自动复位,进而将四个张开爪3向相互远离的方向拉动,四个条形段11将橡胶套14径向撑开一定幅度,从而便于完成多根线束的穿线作业。在完成穿线作业后,再同步控制四个气缸4的活塞杆的伸出,驱动四个张开爪3相互靠近,直至四个张开爪3达到贴合的状态,然后将橡胶套14由四个张开爪3的下端移除即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1