一种用于夹取晶圆花篮的夹爪机构的制作方法
1.本实用新型涉及晶圆加工设备领域,尤其涉及一种用于夹取晶圆花篮的夹爪机构。
背景技术:
2.在晶圆的生产过程中,需要对晶圆进行清洗;在使用槽式清洗机时,需要对晶圆花篮进行传输,常见的传输方式通常是借助机械手夹持,机械手的动力机构通常为气缸,或是其他较为复杂的传动机构,如专利cn2011101985717公开了一种用于卸料机械手,通过两个气缸带动两个夹持头移动并对物品进行夹持,气缸的动力控制较为困难,动力不稳,使机械手夹持不稳、且易造成花篮的损坏。
技术实现要素:
3.本实用新型的一种用于夹取晶圆花篮的夹爪机构,用于解决背景技术中机械手动力控制稳定的技术问题。
4.本实用新型提供的技术方案如下:一种用于夹取晶圆花篮的夹爪机构,连接于伸缩机构上、用于夹取花篮,包括:对称设置、且可实现张闭的两个夹持机构,以及连接在伸缩机构上、用于带动夹持机构张闭的动力机构;
5.动力机构包括:用于连接夹持机构的两个传动杆,连接在传动杆上的转动块,与转动块连接、用于带动转动块转动的位移机构;其中,转动块两侧对称开设有倾斜的滑槽,位移机构两侧分别连接有滚轮,滚轮放置在滑槽内。
6.进一步的,动力机构还包括:连接在伸缩机构上的基座,基座上连接有两两对称的四个轴接座,传动杆的端部轴接在一侧的两个轴接座内。
7.进一步的,位移机构连接在两个传动杆之间,位移机构包括:连接在基座上的电机,电机的输出轴端连接有丝杆,丝杆上连接有丝杆螺母,丝杆螺母连接有导轨机构上,导轨机构连接在基座上;丝杆螺母的两侧分别连接有滚轮。
8.进一步的,基座上设有罩体。
9.进一步的,夹持机构两两对称的连接在传动杆上,夹持机构包括:连接在传动杆上的两个固定架,两个固定架底部可拆卸的连接有与花篮配合的u型夹爪。
10.进一步的,u型夹爪通过卡套与固定架螺纹连接。
11.进一步的,u型夹爪外部包覆有护套。
12.进一步的,花篮上设有夹持部。
13.进一步的,固定架中部连接有、用于监测花篮位置的传感器。
14.与现有技术相比,本实用新型的有益效果是:
15.(1)本实用新型的夹爪机构,通过位移机构位移,带动滚轮在滑槽内位移,从而带动转动块转动;动力机构运行稳定,从而使夹取花篮更为稳定、且不会对花篮造成损坏。
16.(2)本实用新型的夹爪机构,u型夹爪为可拆卸连接,从而当u型夹爪损坏时,便于
更换。
17.(3)本实用新型的夹爪机构,u型夹爪外部包覆有护套,使u型夹爪更耐腐蚀,从而延长u型夹爪的使用寿命。
附图说明
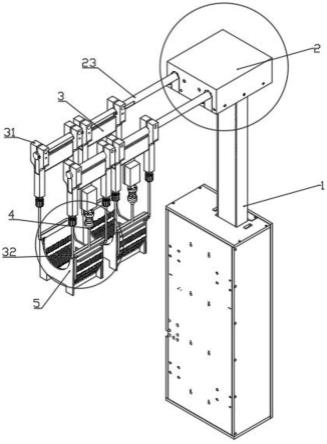
18.图1是本实用新型的夹爪机构的整体结构示意图;
19.图2是本实用新型中动力机构的局部放大图;
20.图3是本实用新型中u型夹爪连接处的局部放大图。
21.附图标记如下:1、伸缩机构,2、动力机构,21、基座,22、轴接座,23、传动杆,24、转动块,241、滑槽,25、电机,26、丝杆,27、丝杆螺母,28、导轨机构,29、滚轮,3、夹持机构,31、固定架,32、u型夹爪,4、传感器,5、花篮,51、夹持部。
具体实施方式
22.以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
23.如图1-3所示,本实用新型是一种用于夹取晶圆花篮的夹爪机构,连接于伸缩机构1上、用于夹取花篮5,包括:对称设置、且可实现张闭的两个夹持机构3,以及连接在伸缩机构1上、用于带动夹持机构3张闭的动力机构2;
24.动力机构2包括:用于连接夹持机构3的两个传动杆23,连接在传动杆23上的转动块24,与转动块24连接、用于带动转动块24转动的位移机构;其中,转动块24两侧对称开设有倾斜的滑槽241,位移机构两侧分别连接有滚轮29,滚轮29放置在滑槽241内。
25.本实施例的伸缩机构1用于带动夹爪机构上下位移,伸缩机构1可以是:伸缩缸、丝杆传动机构、齿轮传动机构等。
26.本实施例的滑槽241为前高后低的倾斜设置,滚轮29随位移机构水平向前位移时,两个转动块24相对转动,使两个夹持机构3随传动杆23转动打开,反之,则闭合。
27.进一步的,动力机构2还包括:连接在伸缩机构1上的基座21,基座21上连接有两两对称的四个轴接座22,传动杆23的端部轴接在一侧的两个轴接座22内。
28.本实施例的轴接座22不仅用于传动杆23的轴接,同时,对传动杆23进行支撑。
29.进一步的,位移机构连接在两个传动杆23之间,位移机构包括:连接在基座21上的电机25,电机25的输出轴端连接有丝杆26,丝杆26上连接有丝杆螺母27,丝杆螺母27连接有导轨机构28上,导轨机构28连接在基座21上;丝杆螺母27的两侧分别连接有滚轮29。
30.本实施例的导轨机构28包括:滑轨,以及在滑轨上活动的滑块。
31.本实施例的丝杆螺母27活动连接在丝杆26上、且底部与滑块连接。
32.具体的,当电机25启动后,电机25带动丝杆26转动,丝杆螺母27随之在丝杆26上位移。
33.进一步的,基座21上设有罩体。
34.进一步的,夹持机构3两两对称的连接在传动杆23上,夹持机构3包括:连接在传动杆23上的两个固定架31,两个固定架31底部可拆卸的连接有与花篮5配合的u型夹爪32。
35.本实施例的u型夹爪32用于夹取花篮5。
36.进一步的,u型夹爪32通过卡套与固定架31螺纹连接。
37.本实施例的u型夹爪32限位连接在卡套内,卡筒与固定架31螺纹连接。
38.进一步的,u型夹爪32外部包覆有护套。
39.本实施例的u型夹爪32需要从清洗池内夹取花篮5,而清洗池内的化学品具有较强的腐蚀性;本实施例的护套为pfa材质制成,具有较高的耐老化性、耐腐蚀性,从而增加u型夹爪32的使用寿命。
40.进一步的,花篮5上设有夹持部51。
41.本实施例的夹持部51可以使u型夹爪32夹持更为稳定。
42.进一步的,固定架31中部连接有、用于监测花篮5位置的传感器4。
43.本实施例的传感器4为位置传感器,用于监测是否夹持住感应花篮5。
44.工作原理:伸缩机构1带动上下位移,电机25启动后,电机25带动丝杆26转动,丝杆螺母27随之在丝杆26上位移,丝杆螺母27两侧的滚轮29随之向前位移时,两个转动块24相对转动,使两个夹持机构3随传动杆23转动打开;伸缩机构1带动上下位移,将u型夹爪32位移至花篮5夹持部51下侧,闭合u型夹爪32后,向上提起花篮5。
技术特征:
1.一种用于夹取晶圆花篮的夹爪机构,连接于伸缩机构(1)上、用于夹取花篮(5),其特征在于,包括:对称设置、且可实现张闭的两个夹持机构(3),以及连接在伸缩机构(1)上、用于带动所述夹持机构(3)张闭的动力机构(2);所述动力机构(2)包括:用于连接所述夹持机构(3)的两个传动杆(23),连接在所述传动杆(23)上的转动块(24),与所述转动块(24)连接、用于带动所述转动块(24)转动的位移机构;其中,所述转动块(24)两侧对称开设有倾斜的滑槽(241),所述位移机构两侧分别连接有滚轮(29),所述滚轮(29)放置在所述滑槽(241)内。2.如权利要求1所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述动力机构(2)还包括:连接在伸缩机构(1)上的基座(21),所述基座(21)上连接有两两对称的四个轴接座(22),所述传动杆(23)的端部轴接在一侧的两个所述轴接座(22)内。3.如权利要求2所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述位移机构连接在两个所述传动杆(23)之间,所述位移机构包括:连接在所述基座(21)上的电机(25),所述电机(25)的输出轴端连接有丝杆(26),所述丝杆(26)上连接有丝杆螺母(27),所述丝杆螺母(27)连接在导轨机构(28)上,所述导轨机构(28)连接在所述基座(21)上;所述丝杆螺母(27)的两侧分别连接有所述滚轮(29)。4.如权利要求2所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述基座(21)上设有罩体。5.如权利要求1所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述夹持机构(3)两两对称的连接在所述传动杆(23)上,所述夹持机构(3)包括:连接在所述传动杆(23)上的两个固定架(31),两个所述固定架(31)底部可拆卸的连接有与所述花篮(5)配合的u型夹爪(32)。6.如权利要求5所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述u型夹爪(32)通过卡套与所述固定架(31)螺纹连接。7.如权利要求5所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述u型夹爪(32)外部包覆有护套。8.如权利要求1所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述花篮(5)上设有夹持部(51)。9.如权利要求5所述的一种用于夹取晶圆花篮的夹爪机构,其特征在于,所述固定架(31)中部连接有、用于监测花篮(5)位置的传感器(4)。
技术总结
本实用新型属于领域,提供了一种用于夹取晶圆花篮的夹爪机构,连接于伸缩机构上、用于夹取花篮,包括:对称设置、且可实现张闭的两个夹持机构,以及连接在伸缩机构上、用于带动夹持机构张闭的动力机构;动力机构包括:用于连接夹持机构的两个传动杆,连接在传动杆上的转动块,与转动块连接、用于带动转动块转动的位移机构;其中,转动块两侧对称开设有倾斜的滑槽,位移机构两侧分别连接有滚轮,滚轮放置在滑槽内。本实用新型的用于夹取晶圆花篮的夹爪机构,用于解决机械手动力控制稳定的技术问题。题。题。
技术研发人员:陈铁龙 程龙祥
受保护的技术使用者:谷微半导体科技(江苏)有限公司
技术研发日:2022.08.19
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1