一种工业机器人的目标抓取装置的制作方法
本技术涉及工业机器人,具体是指一种工业机器人的目标抓取装置。
背景技术:
1、工业机器人定义为“其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。生产中常用工业机器人的货物抓取装置来抓取运送货物,但是现有的用于工业机器人的货物抓取装置在使用时仍存在一定不足。
2、在工业机器人进行抓取的时候,货物容易掉落,机械手的夹持效果不佳,尤其是抓取方形物体的时候,不能很好地进行抓取。
技术实现思路
1、本实用新型为解决上述各种问题,提出了抓取效果好,物体不容易掉落的一种工业机器人的目标抓取装置。
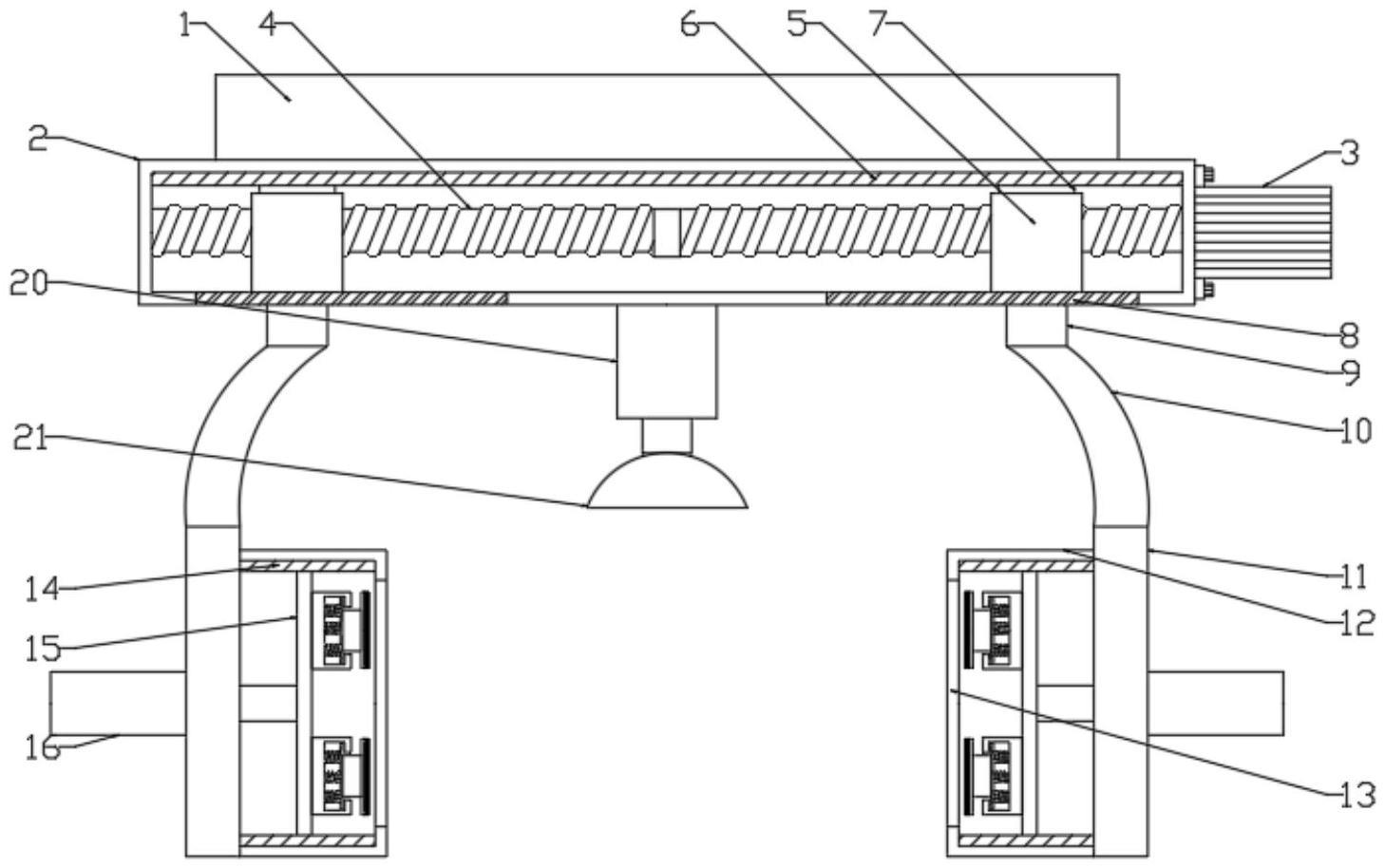
2、为解决上述的技术问题,本实用新型提出的技术方案为:一种工业机器人的目标抓取装置,包括连接板,所述连接板下面连接设有滑动箱,所述滑动箱下面两侧均连接设有通过槽,所述滑动箱一侧通过螺栓固定连接设有伺服电机,所述伺服电机的输出端伸入所述滑动箱内驱动连接设有螺纹杆,所述螺纹杆和所述滑动箱两侧均转动连接,所述螺纹杆中间处两侧的螺纹方向相反,所述螺纹杆和所述滑动箱之间连接设有内外移动装置,所述内外移动装置下面连接设有弧状板,所述弧状板下面连接设有竖板,所述竖板内侧连接设有保护箱,所述保护箱内上下侧均连接设有滑槽二,所述滑槽二之间滑动连接设有移动板,所述移动板上下侧均连接设有和所述滑槽二相适配的滑条二,所述保护箱相对侧均设有出口,所述移动板外侧连接设有扶正夹持装置,所述竖板外侧连接设有电动推杆一,所述电动推杆一的输出端穿过所述竖板且和所述移动板相连接,所述滑动箱下面中间处连接设有吸取装置。
3、本实用新型与现有技术相比优点在于:本实用新型在使用时,对于抓取方形物体,把两侧的竖板置于物体两侧,启动伺服电机驱动螺纹杆转动,两侧的竖板向内靠拢,启动电动推杆一伸出,使移动板外移,工型板伸出滑动框外且和方形物体接触,工型板在滑动框内滑动,减震器起到缓冲减震的作用,启动电动推杆二伸出,使得真空电动吸盘吸住方形物体,抓取工作完成,实现抓取效果好,物体不容易掉落的优点。
4、进一步的,所述内外移动装置包括连接设于所述螺纹杆上两侧的移动块,所述滑动箱下面两侧均连接设有通过槽,所述移动块下面连接设有伸出所述通过槽连接设有通过板,所述通过板下面和所述弧状板相连接。
5、进一步的,所述滑动箱内上面连接设有滑槽一,所述移动块上面连接设有和所述滑槽一相适配的滑条一。
6、进一步的,所述扶正夹持装置包括连接设于所述移动板外侧的滑动框,所述滑动框内滑动连接设有工型板,所述工型板和所述滑动框之间连接设有减震器。
7、进一步的,所述吸取装置包括连接设于所述滑动箱下面中间处的电动推杆二,所述电动推杆二的下端连接设有真空电动吸盘。
技术特征:
1.一种工业机器人的目标抓取装置,包括连接板(1),其特征在于:所述连接板(1)下面连接设有滑动箱(2),所述滑动箱(2)下面两侧均连接设有通过槽(8),所述滑动箱(2)一侧通过螺栓固定连接设有伺服电机(3),所述伺服电机(3)的输出端伸入所述滑动箱(2)内驱动连接设有螺纹杆(4),所述螺纹杆(4)和所述滑动箱(2)两侧均转动连接,所述螺纹杆(4)中间处两侧的螺纹方向相反,所述螺纹杆(4)和所述滑动箱(2)之间连接设有内外移动装置,所述内外移动装置下面连接设有弧状板(10),所述弧状板(10)下面连接设有竖板(11),所述竖板(11)内侧连接设有保护箱(12),所述保护箱(12)内上下侧均连接设有滑槽二(14),所述滑槽二(14)之间滑动连接设有移动板(15),所述移动板(15)上下侧均连接设有和所述滑槽二(14)相适配的滑条二(22),所述保护箱(12)相对侧均设有出口(13),所述移动板(15)外侧连接设有扶正夹持装置,所述竖板(11)外侧连接设有电动推杆一(16),所述电动推杆一(16)的输出端穿过所述竖板(11)且和所述移动板(15)相连接,所述滑动箱(2)下面中间处连接设有吸取装置。
2.根据权利要求1所述的一种工业机器人的目标抓取装置,其特征在于:所述内外移动装置包括连接设于所述螺纹杆(4)上两侧的移动块(5),所述滑动箱(2)下面两侧均连接设有通过槽(8),所述移动块(5)下面连接设有伸出所述通过槽(8)连接设有通过板(9),所述通过板(9)下面和所述弧状板(10)相连接。
3.根据权利要求2所述的一种工业机器人的目标抓取装置,其特征在于:所述滑动箱(2)内上面连接设有滑槽一(6),所述移动块(5)上面连接设有和所述滑槽一(6)相适配的滑条一(7)。
4.根据权利要求1所述的一种工业机器人的目标抓取装置,其特征在于:所述扶正夹持装置包括连接设于所述移动板(15)外侧的滑动框(17),所述滑动框(17)内滑动连接设有工型板(18),所述工型板(18)和所述滑动框(17)之间连接设有减震器(19)。
5.根据权利要求1所述的一种工业机器人的目标抓取装置,其特征在于:所述吸取装置包括连接设于所述滑动箱(2)下面中间处的电动推杆二(20),所述电动推杆二(20)的下端连接设有真空电动吸盘(21)。
技术总结
本技术公开了一种工业机器人的目标抓取装置,包括连接板,连接板下面连接设有滑动箱,滑动箱下面两侧均连接设有通过槽,螺纹杆和滑动箱两侧均转动连接,螺纹杆中间处两侧的螺纹方向相反,螺纹杆和滑动箱之间连接设有内外移动装置,内外移动装置下面连接设有弧状板,保护箱内上下侧均连接设有滑槽二,滑槽二之间滑动连接设有移动板,移动板上下侧均连接设有和滑槽二相适配的滑条二,保护箱相对侧均设有出口,移动板外侧连接设有扶正夹持装置,竖板外侧连接设有电动推杆一,电动推杆一的输出端穿过竖板且和移动板相连接,滑动箱下面中间处连接设有吸取装置。本技术的优点在于:抓取效果好,物体不容易掉落。
技术研发人员:崔建斌
受保护的技术使用者:西安匠心智能工业设备有限公司
技术研发日:20220826
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!