一种机械手用稳定性高的底盘的制作方法
1.本实用新型涉及机械手技术领域,具体涉及一种机械手用稳定性高的底盘。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点;底盘是指汽车上由传动系、行驶系、转向系和制动系四部分组成的组合,支承、安装汽车发动机及其各部件、总成,形成汽车的整体造型,承受发动机动力,保证正常行驶。
3.现有技术中,提出来公开号为cn213859262u,公开日为2021年8月3日的中国实用新型专利文件,来解决上述存在的技术问题,该专利文献所公开的技术方案如下:一种机械手用底盘用固定装置,包括支撑台,所述支撑台上端设置有四个固定块,固定块分别位于支撑台上端前后左右位置,所述固定块右侧均开设有卡槽,卡槽中部连接有第一转轴,所述第一转轴中部转动连接有夹爪,夹爪为v字形,夹爪上端位于支撑台上方,夹爪下端位于支撑台之中,所述支撑台前端设置有控制版面,支撑台内侧开设有内置腔体。
4.上述技术方案在实际使用过程中,会出现以下问题:
5.(1)该机械手底盘装置稳定性不够牢靠,在对机械工作的过程中由于底部的低稳定性使得该机械手夹取的效果不理想。
6.(2)该机械手的底盘没有加以设置机械手,不能使得该装置更加美观。
技术实现要素:
7.本实用新型提供一种机械手用稳定性高的底盘,以解决上述背景技术中提出的问题。
8.为解决上述技术问题,本实用新型所采用的技术方案是:
9.一种机械手用稳定性高的底盘,包括稳定装置,所述稳定装置的下方固定安装有夹取装置。
10.所述稳定装置包括底座,所述底座的顶部固定安装有缓冲机构,所述底座的底部开设有减震孔。
11.所述夹取装置包括第一支撑顶板,所述第一支撑顶板的内部穿过转动轴,所述转动轴的两端固定连接在支撑板的靠内侧,所述支撑板的底部固定连接在第二支撑顶板的顶部。
12.本实用新型技术方案的进一步改进在于:所述缓冲机构的顶部固定连接有第一底板,所述第一底板的顶部固定连接有减震机构,且减震机构设置有若干个。
13.本实用新型技术方案的进一步改进在于:所述减震机构的顶部固定连接在第二底板的底部,所述第二底板的顶部固定连接有支撑柱。
14.本实用新型技术方案的进一步改进在于:所述第二支撑顶板的顶部后侧设置有第
一传动轮,所述第二支撑顶板的顶部前侧设置有第二传动轮,所述第二传动轮的右侧设置有第三传动轮,所述第一传动轮、第二传动轮和第三传动轮通过皮带相连。
15.本实用新型技术方案的进一步改进在于:所述第一传动轮的底部固定连接有电机,且位于第二支撑顶板的底部,所述第二传动轮的底部固定连接有第一蜗杆,所述第一蜗杆的左侧啮合连接有第一蜗轮,所述第一蜗轮的轴心处固定连接有第一转动柱,所述第一转动柱的后侧固定连接在第一衔接板的前侧,所述第一转动柱的前侧底部固定连接有第一机械手臂,所述第一机械手臂的右侧设置有第一硅胶垫。
16.本实用新型技术方案的进一步改进在于:所述第三传动轮的底部固定连接有第二蜗杆,所述第二蜗杆的右侧啮合连接有第二蜗轮,所述第二蜗轮的轴心处固定连接有第二转轴柱,所述第二转轴柱的后侧固定连接在第二衔接板的前侧,所述第二转轴柱的前侧底部固定连接有第二机械手臂,所述第二机械手臂的左侧设置有第二硅胶垫。
17.本实用新型技术方案的进一步改进在于:所述缓冲机构包括缓冲外壳,所述缓冲外壳的内壁设置有活动板,所述活动板的底部固定连接有液压板。
18.本实用新型技术方案的进一步改进在于:所述减震机构包括阻尼器,所述阻尼器的外表面上设置有弹簧。
19.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
20.1、本实用新型提供一种机械手用稳定性高的底盘,在该装置上安装了一种稳定装置,通过设置的缓冲机构和减震机构,使得能够在机械手工作时加强底部的稳定,同时能够将工作产生的振动通过减震机构和减震孔将振动减到最小。
21.2、本实用新型提供一种机械手用稳定性高的底盘,在该装置上安装了一种夹取装置,通过设置的传动轮、蜗轮、蜗杆、机械手臂和硅胶垫,使得能够将需要夹取的物料夹住,此外,两个蜗轮设置的纹路相反,以此使得两个机械手臂运动的方向相反。
附图说明
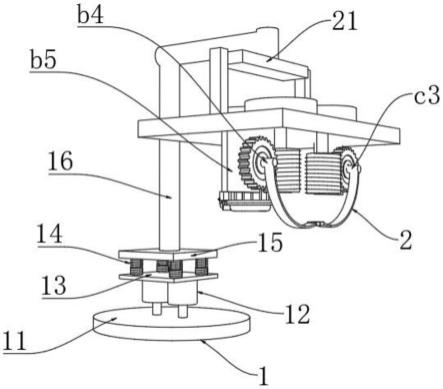
22.图1为本实用新型的结构示意图;
23.图2为本实用新型为图1的结构示意图;
24.图3为本实用新型为图1稳定装置的底部结构示意图;
25.图4为本实用新型为图1缓冲机构的内部结构示意图。
26.图中:1、稳定装置;2、夹取装置;11、底座;12、缓冲机构;13、第一底板;14、减震机构;15、第二底板;16、支撑柱;21、第一支撑顶板;22、转动轴;23、支撑板;24、第二支撑顶板;a1、第一传动轮;a2、第二传动轮;a3、第三传动轮;a4、皮带;b1、电机;b2、第一蜗杆;b3、第一蜗轮;b4、第一转动柱;b5、第一衔接板;b6、第一机械手臂;b7、第一硅胶垫;c1、第二蜗杆;c2、第二蜗轮;c3、第二转轴柱;c4、第二衔接板;c5、第二机械手臂;c6、第二硅胶垫;d、减震孔;e1、缓冲外壳;e2、活动板;e3、液压板;f1、弹簧;f2、阻尼器。
具体实施方式
27.请参阅图1-4,本实用新型提供一种技术方案:一种机械手用稳定性高的底盘,包括稳定装置1,稳定装置1的下方固定安装有夹取装置2。
28.在本实施例中,稳定装置1包括底座11,底座11的顶部固定安装有缓冲机构12,底
座11的底部开设有减震孔d,缓冲机构12的顶部固定连接有第一底板13,第一底板13的顶部固定连接有减震机构14,且减震机构14设置有若干个,减震机构14的顶部固定连接在第二底板15的底部,第二底板15的顶部固定连接有支撑柱16,缓冲机构12包括缓冲外壳e1,缓冲外壳e1的内壁设置有活动板e2,活动板e2的底部固定连接有液压板e3,减震机构14包括阻尼器f2,阻尼器f2的外表面上设置有弹簧f1,在该装置上安装了一种稳定装置1,通过设置的缓冲机构12和减震机构14,使得能够在机械手工作时加强底部的稳定,同时能够将工作产生的振动通过减震机构14和减震孔d将振动减到最小。
29.优选的,夹取装置2包括第一支撑顶板21,第一支撑顶板21的内部穿过转动轴22,转动轴22的两端固定连接在支撑板23的靠内侧,支撑板23的底部固定连接在第二支撑顶板24的顶部,第二支撑顶板24的顶部后侧设置有第一传动轮a1,第二支撑顶板24的顶部前侧设置有第二传动轮a2,第二传动轮a2的右侧设置有第三传动轮a3,第一传动轮a1、第二传动轮a2和第三传动轮a3通过皮带a4相连,第一传动轮a1的底部固定连接有电机b1,且位于第二支撑顶板24的底部,第二传动轮a2的底部固定连接有第一蜗杆b2,第一蜗杆b2的左侧啮合连接有第一蜗轮b3,第一蜗轮b3的轴心处固定连接有第一转动柱b4,第一转动柱b4的后侧固定连接在第一衔接板b5的前侧,第一转动柱b4的前侧底部固定连接有第一机械手臂b6,第一机械手臂b6的右侧设置有第一硅胶垫b7,第三传动轮a3的底部固定连接有第二蜗杆c1,第二蜗杆c1的右侧啮合连接有第二蜗轮c2,第二蜗轮c2的轴心处固定连接有第二转轴柱c3,第二转轴柱c3的后侧固定连接在第二衔接板c4的前侧,第二转轴柱c3的前侧底部固定连接有第二机械手臂c5,第二机械手臂c5的左侧设置有第二硅胶垫c6,在该装置上安装了一种夹取装置2,通过设置的传动轮、蜗轮、蜗杆、机械手臂和硅胶垫,使得能够将需要夹取的物料夹住,此外,两个蜗轮设置的纹路相反,以此使得两个机械手臂运动的方向相反。
30.下面具体说一下该机械手用稳定性高的底盘的工作原理。
31.如图1-4所示,首先,通过稳定装置1将底盘稳定住,启动电机b1,带动第一传动轮a1转动,通过皮带a4带动第二传动轮a2和第三传动轮a3转动,使得两侧的蜗杆转动,带动外侧的蜗轮转动,使得轴心处的转动柱转动,从而让两个机械手臂运动,且方向相反。
32.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1