机械手抓取设备的制作方法
本技术涉及抓取设备,具体来说涉及一种机械手抓取设备。
背景技术:
1、在流水线为代替人工,多会使用视觉识别组件(如海康威视)来对传送带上的物件进行识别并标定位置,而后使用机械手对识别后的物体进行抓取,其中抓取装置多使用吸盘来对盘状件或者是塑料膨胀件进行抓取。
2、在现有技术中,当盘状件上的可抓取范围较小时,只能有较小的吸盘配合真空泵或者是真空发生器进行抓取,一旦盘状件的重量过重或者是机械手移动较快时,盘状件会因为甩动时产生的惯性和离心力脱出吸盘。
技术实现思路
1、本实用新型的目的是提供一种机械手抓取设备,旨在解决可抓取范围较小时,吸盘吸力差的问题。
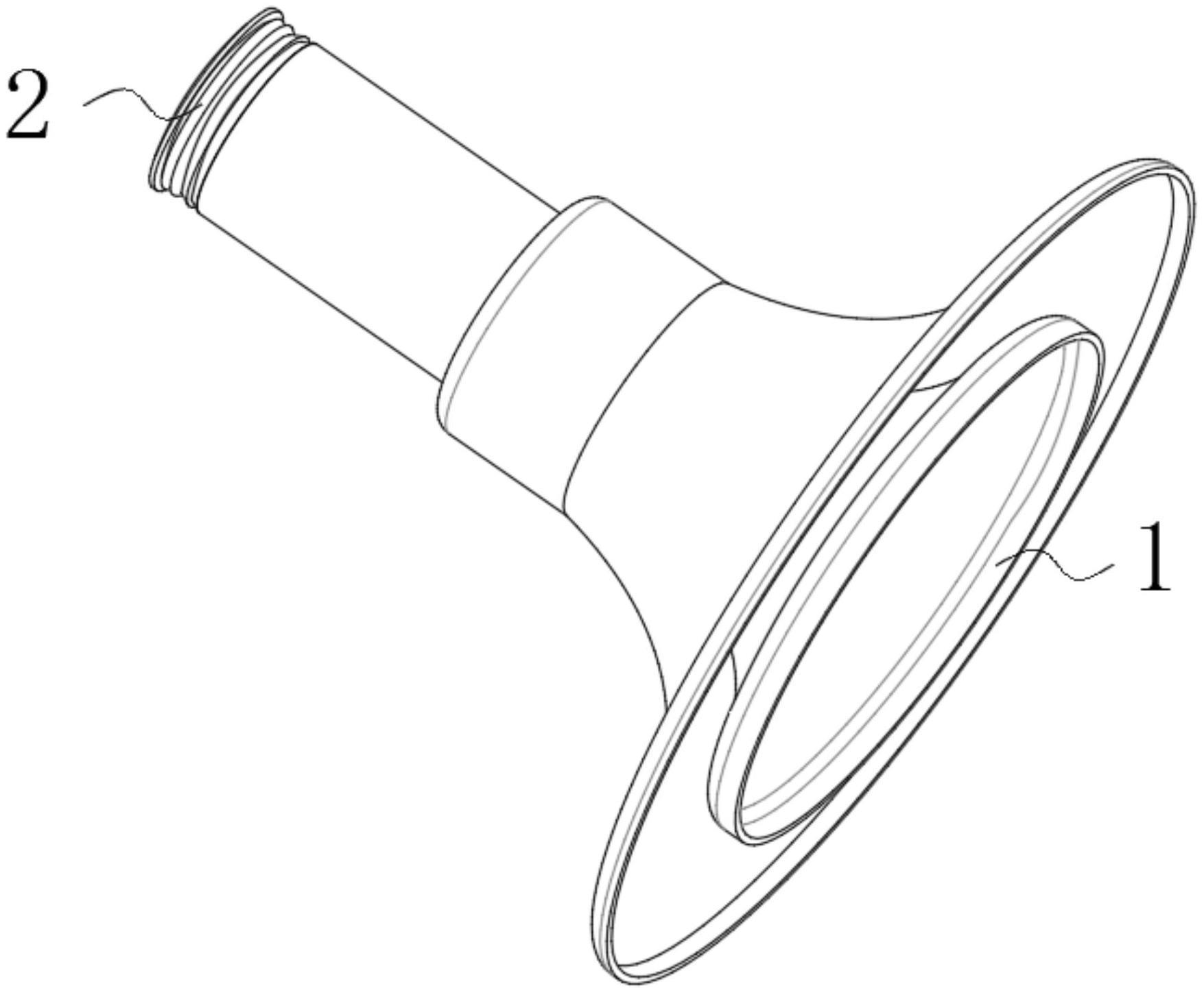
2、为了实现上述目的,本实用新型提供如下技术方案:一种机械手抓取设备,包括复合吸盘,所述复合吸盘包括第一吸盘和固定连接于所述第一吸盘上的第二吸盘,所述第一吸盘上固定连通有抽吸管,所述抽吸管上对称开设有活动抽吸口,所述活动抽吸口第一端设置有封堵块,所述第一吸盘延伸出所述第二吸盘预定距离。
3、作为优选的,所述抽吸管第一端固定连通有连接部,所述连接部包括固定连接于所述抽吸管第一端的封堵头,所述封堵头通过连接件固定连通于真空发生器内。
4、作为优选的,所述封堵头内固定连接有固定管,所述固定管深入所述抽吸管内。
5、作为优选的,所述第二吸盘上设置有竖直部,所述竖直部固定连接于所述抽吸管上。
6、作为优选的,所述竖直部和所述抽吸管之间固定连接有保持架,所述保持架呈圆周阵列开设有通孔。
7、作为优选的,所述封堵头第一端设置有封堵环、第二端开设有三角堵环。
8、作为优选的,所述封堵块为聚氨酯橡胶块。
9、作为优选的,所述第一吸盘为丁腈橡胶盘。
10、作为优选的,所述第二吸盘为丁腈橡胶盘。
11、作为优选的,所述固定管为金属管。
12、在上述技术方案中,本实用新型提供的一种机械手抓取设备,具备以下有益效果:利用了复合吸盘,能在使用时,首先由第一吸盘接触吸附面,而后进行抽吸时第一吸盘进行抽吸以使工件和第二吸盘拉近,当第一吸盘的吸附力达到预定值时,第二吸盘产生吸力以对工件再次进行吸附,能增强吸附能力,以防止工件在机械臂进行移动时因为离心力和惯性与复合吸盘脱落,还在复合吸盘上设置有封堵头,能在对接气管时封闭,不容易漏气。
技术特征:
1.一种机械手抓取设备,其特征在于,包括复合吸盘(1),所述复合吸盘(1)包括第一吸盘(11)和固定连接于所述第一吸盘(11)上的第二吸盘(12),所述第一吸盘(11)上固定连通有抽吸管(111),所述抽吸管(111)上对称开设有活动抽吸口(112),所述活动抽吸口(112)第一端设置有封堵块(113),所述第一吸盘(11)延伸出所述第二吸盘(12)预定距离。
2.根据权利要求1所述的机械手抓取设备,其特征在于,所述抽吸管(111)第一端固定连通有连接部(2),所述连接部(2)包括固定连接于所述抽吸管(111)第一端的封堵头(22),所述封堵头(22)通过连接件固定连通于真空发生器内。
3.根据权利要求2所述的机械手抓取设备,其特征在于,所述封堵头(22)内固定连接有固定管(21),所述固定管(21)深入所述抽吸管(111)内。
4.根据权利要求1所述的机械手抓取设备,其特征在于,所述第二吸盘(12)上设置有竖直部(121),所述竖直部(121)固定连接于所述抽吸管(111)上。
5.根据权利要求4所述的机械手抓取设备,其特征在于,所述竖直部(121)和所述抽吸管(111)之间固定连接有保持架(122),所述保持架(122)呈圆周阵列开设有通孔(1221)。
6.根据权利要求2所述的机械手抓取设备,其特征在于,所述封堵头(22)第一端设置有封堵环(222)、第二端开设有三角堵环(221)。
7.根据权利要求1所述的机械手抓取设备,其特征在于,所述封堵块(113)为聚氨酯橡胶块。
8.根据权利要求1所述的机械手抓取设备,其特征在于,所述第一吸盘(11)为丁腈橡胶盘。
9.根据权利要求1所述的机械手抓取设备,其特征在于,所述第二吸盘(12)为丁腈橡胶盘。
10.根据权利要求3所述的机械手抓取设备,其特征在于,所述固定管(21)为金属管。
技术总结
本技术公开了一种机械手抓取设备,包括复合吸盘,所述复合吸盘包括第一吸盘和固定连接于所述第一吸盘上的第二吸盘,所述第一吸盘上固定连通有抽吸管,所述抽吸管上对称开设有活动抽吸口,所述活动抽吸口第一端设置有封堵块,所述第一吸盘延伸出所述第二吸盘预定距离。本技术提供的机械手抓取设备,利用了复合吸盘,能在使用时,首先由第一吸盘接触吸附面,而后进行抽吸时第一吸盘进行抽吸以使工件和第二吸盘拉近,当第一吸盘的吸附力达到预定值时,第二吸盘产生吸力以对工件再次进行吸附,能增强吸附能力,以防止工件在机械臂进行移动时因为离心力和惯性与复合吸盘脱落,还在复合吸盘上设置有封堵头,能在对接气管时封闭。
技术研发人员:朱海顺,倪长乐,张辉,陈自强
受保护的技术使用者:镇江智能制造创新研究院
技术研发日:20220901
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!