一种可规则扩展的机器人机体零件及机体机构的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种可规则扩展的机器人机体零件及机体机构。
背景技术:
2.机体结构和机械传动系统共同组成机器人本体,机体结构作为支承平台,用于承载机器人其他功能系统,因此构建机体结构需要遵循一些规则,包括但不限于对称、牢固、易扩展,以保障机器人平衡稳定,有利于机器人顺畅运动。目前中小学教学用机器人本体的机体结构根据实施方式主要分为三种:第一种是一体化固定成型的机体结构;第二种是采用榫卯连接方式组成的机体结构;第三种是采用螺纹连接方式组成的机体结构。机器人三种机体结构各自具备相应的教学适用性,但也有明显的缺点。
3.一体化固定成型的机体结构一般不支持改变,也不支持扩展,机体结构的改变或者扩展都将改变功能模块的安装位置,造成功能模块无法安装到位,所以一体化固定成型的机体结构存在难改变难扩展的缺点,限制了所构建机器人的功能扩展和创新改进。
4.采用榫卯连接方式组成的机体结构多应用于塑料拼插教育机器人领域,采用螺纹连接方式组成的机体结构多应用于金属组装教育机器人领域。不论是榫卯方式构建的机体结构,还是使用螺纹方式构建的机体结构,其本质是相同,都是采用一定数量的零件,按照牢固、对称等规则,连接零件构建出机体结构。
5.采用上述榫卯或螺纹连接方式构建出支承机器人的机体结构均具有难扩展的缺点,且在构建机体结构时需要的零件数量较多,而连接零件越多形成的机体结构平衡稳定性越差,因此榫卯或螺纹连接方式会影响机器人的平衡稳定性和运动流畅性。
技术实现要素:
6.有鉴于此,本实用新型的目的在于提出一种可规则扩展的机器人机体零件及机体机构,以解决机器人机体机构稳定性差和可扩展性差的问题。
7.基于上述目的,本实用新型提供了一种可规则扩展的机器人机体零件,所述机体零件用以安装机器人的辅助件,所述机体零件为正多边形零件;
8.所述正多边形零件的顶角处设有圆弧缺口,多个所述圆弧缺口组合能够形成供紧固件穿过的组合通孔;
9.所述正多边形零件靠近所述圆弧缺口处设有供紧固件穿过的连接通孔;
10.所述正多边形零件上设有多个孔洞,用以与所述辅助件插接固定。
11.进一步的,所述正多边形零件为正六边形零件,其顶角处的圆弧缺口的弧度为120
°
,靠近每个所述圆弧缺口处设有两个所述连接通孔,所述连接通孔为圆形,两个所述连接通孔相对于其对应的所述顶角的角平分线对称设置。
12.进一步的,所述正六边形零件上的所述孔洞为长条形孔洞,所述长条形孔洞位于所述正六边形零件的边沿内侧且与所述边沿平行,所述长条形孔洞供与其适配的所述辅助
件穿过,使得所述辅助件在所述机体零件上插接固定。
13.进一步的,所述正六边形零件上的所述孔洞为圆角矩形孔洞,所述圆角矩形孔洞设有两个且相对于所述正六边形零件的一中线对称设置。
14.进一步的,所述正六边形零件上的所述孔洞为圆孔洞,多个所述圆孔洞相对于所述正六边形零件的一中线对称设置。
15.进一步的,所述正多边形零件为正方形零件,其顶角处的圆弧缺口的弧度为90
°
,靠近每个所述圆弧缺口处设有一个所述连接通孔,所述连接通孔为弧形孔,所述连接通孔相对于其对应的所述顶角的角平分线对称设置。
16.进一步的,所述正方形零件上的孔洞包括法兰孔洞和多个圆孔洞,所述法兰孔洞位于所述正方形零件的中部,多个所述圆孔洞环绕所述法兰孔洞均匀设置。
17.进一步的,所述正多边形零件为正三角形零件,其顶角处的圆弧缺口的弧度为60
°
,靠近每个所述圆弧缺口处设有一个所述连接通孔,所述连接通孔为圆形,所述连接通孔的圆心位于其对应的所述顶角的角平分线上;所述正三角形零件上的多个孔洞沿所述正三角形零件的一轴线对称设置。
18.进一步的,所述辅助件为法兰时,所述正三角形零件中部的所述孔洞为法兰孔洞,所述法兰孔洞用以连接所述法兰。
19.本技术还提供一种可规则扩展的机器人机体机构,包括连接件及如上述所述的一种可规则扩展的机器人机体零件,所述连接件上设有与所述组合通孔适配的第一通孔,且所述第一通孔外围设有与所述连接通孔适配的第二通孔,所述第二通孔设有多个,所述紧固件穿过对应设置的所述组合通孔和所述第一通孔以及对应设置的所述连接通孔和所述第二通孔以在一平面内固定连接多个所述机体零件。
20.从上面所述可以看出,本实用新型提供的一种可规则扩展的机器人机体零件及机体机构,其中,通过将机体零件设置为可平面密铺的正多边形结构,使得其能够可规则扩展为符合机器人对称性等要求的机体结构,且所述机体零件上设有多个孔洞能够在满足对称的原则下与所述辅助件连接,使得组成的所述机体结构既满足可扩展性,又具备稳定性良好的功能。所述机体零件在遵循对称和牢固规则下能有效降低构建难度,且容易灵活,扩展,并依然保持对称和牢固性。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
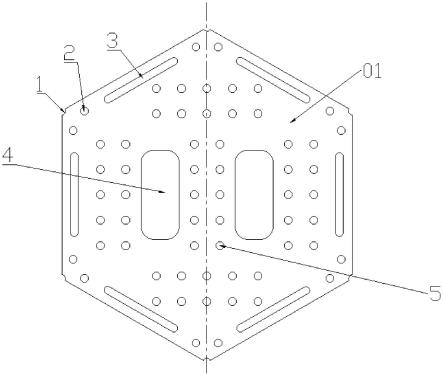
22.图1为本实用新型实施例可规则扩展的机器人机体零件为正六边形零件时的结构示意图;
23.图2为本实用新型实施例可规则扩展的机器人机体零件为正方形零件时的结构示意图;
24.图3为本实用新型实施例可规则扩展的机器人机体零件为正三角形零件时的结构示意图;
25.图4为本实用新型实施例可规则扩展的机器人机体结构的结构示意图;
26.图5为本实用新型实施例可规则扩展的机器人机体结构的结构示意图;
27.图6为本实用新型实施例连接件的结构示意图。
28.图中:01、机体零件;1、圆弧缺口;2、连接通孔;3、长条形孔洞;4、圆角矩形孔洞;5、圆孔洞;6、法兰孔洞;61、大通孔;62、小通孔;7、连接件;71、第一通孔;72、第二通孔;8、机体机构;9、组合通孔。
具体实施方式
29.为使本实用新型的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。
30.需要说明的是,除非另外定义,本实用新型实施例使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
31.本技术一个或多个实施例提供了一种可规则扩展的机器人机体零件及机体结构,能够在满足对称的原则下,使得机体结构实现规则扩展。
32.以下通过具体的实施例来详细说明本技术一个或多个实施例的技术方案,一种可规则扩展的机器人机体零件,如图1、图2和图3所示,所述机体零件01用以安装机器人的辅助件,所述机体零件01为正多边形零件,多个所述机体零件01组合在一起能在平面上进行密铺。
33.所述正多边形零件的顶角处设有圆弧缺口1,多个所述圆弧缺口1组合能够形成供紧固件穿过的组合通孔9,多个所述机体零件01在平面上密铺时,互相贴近的多个所述机体零件01顶角上的圆弧缺口1互相抵接形成所述组合通孔9。
34.当所述紧固件为带有螺栓时,所述螺栓的尾部穿过所述组合通孔9,所述螺栓的头部与形成所述组合通孔9的多个所述正多边形零件贴合且无法穿过所述组合通孔9,将所述螺栓的尾部用螺母拧紧固定,多个所述正多边形零件便在所述螺栓的连接作用下连接在一起。
35.所述正多边形零件靠近所述圆弧缺口1处设有供紧固件穿过的连接通孔2,所述连接通孔2与所述组合通孔9均是供所述紧固件穿过,发挥固定连接多个所述正多边形零件的作用。
36.所述正多边形零件上设有多个孔洞,用以与所述辅助件插接固定,使得所述正多边形零件连接所述辅助件,具备可扩展的作用。
37.所述机体零件01在遵循对称和牢固规则下能有效降低构建难度,且容易灵活,扩展,并依然保持对称和牢固性。
38.在一些实施例中,如图1所示,所述正多边形零件为正六边形零件,其顶角处的圆
弧缺口1的弧度为120
°
,靠近每个所述圆弧缺口1处设有两个所述连接通孔2,所述连接通孔2为圆形,两个所述连接通孔2相对于其对应的所述顶角的角平分线对称设置,当所述正多边形零件为正六边形零件时,其顶角的角度为120
°
,相应的,当3个所述正六边形零件的顶角贴近在一起时,三个顶角的角度为360
°
,正好形成一个圆形的组合通孔9,供所述紧固件通过。所述正六边形零件上的连接通孔2和孔洞均匀设置,使得所述正六边形零件满足对称原则。
39.在一些实施例中,所述正六边形零件上的所述孔洞为长条形孔洞3,所述长条形孔洞3位于所述正六边形零件的边沿内侧且与所述边沿平行,所述长条形孔洞3供与其适配的所述辅助件穿过,使得所述辅助件在所述机体零件01上插接固定。所述长条形孔洞3均匀设置使得所述正六边形零件满足对称原则,所述长条形孔洞3中能够插入统一高度且与其适配的所述辅助件(例如侧板),上面再覆盖另一所述正六边形零件,使得所述辅助件(例如侧板)的另一端插入该另一所示正六边形零件上的所述长条形孔洞3,再将所述紧固件穿过两个所述正六边形零件上对应的连接通孔2,将两个所述正六边形零件固定连接,形成六面柱体,其内部能够安装电路模块或其他需要保护的模块。所述正六边形满足组成所述机器人的机体机构8的可规则扩展的需要。
40.在一些实施例中,所述正六边形零件上的所述孔洞为圆角矩形孔洞4,所述圆角矩形孔洞4设有两个且相对于所述正六边形零件的一中线对称设置,使得所述正六边形零件满足对称原则,且所述圆角矩形孔洞4较大,能够用于穿插线缆,便于线缆通过。
41.在一些实施例中,所述正六边形零件上的所述孔洞为圆孔洞5,多个所述圆孔洞5相对于所述正六边形零件的一中线对称设置。所述圆孔洞5能够供与其适配的所述辅助件(例如圆杆)插入,形成支撑结构支撑和连接其他物体(例如亚克力板)。
42.在一些实施例中,如图2所示,所述正多边形零件为正方形零件,其顶角处的圆弧缺口1的弧度为90
°
,靠近每个所述圆弧缺口1处设有一个所述连接通孔2,所述连接通孔2为弧形孔,所述连接通孔2相对于其对应的所述顶角的角平分线对称设置。相应的,4个所述正方形零件上的所述圆弧缺口1连接在一起能够形成供紧固件通过的组合通孔9,所述连接通孔2为弧形孔能够便于紧固件的安装。所述正方形零件上的所述孔洞和连接通孔2均匀设置,使得所述正方形零件满足组成所述机器人所需的对称性。
43.在一些实施例中,所述正方形零件上的孔洞包括法兰孔洞6和多个圆孔洞5,所述法兰孔洞6位于所述正方形零件的中部,多个所述圆孔洞5环绕所述法兰孔洞6均匀设置。当所述辅助件为法兰时,所述法兰孔洞6能够连接所述法兰,多个所述圆孔洞5能够连接其他所述辅助件,如此设置能够使得所述正方形零件在连接不同的所述辅助件时仍满足对称性,符合可规则扩展的原则。
44.在一些实施例中,如图3所示,所述正多边形零件为正三角形零件,其顶角处的圆弧缺口1的弧度为60
°
,靠近每个所述圆弧缺口1处设有一个所述连接通孔2,所述连接通孔2为圆形,所述连接通孔2的圆心位于其对应的所述顶角的角平分线上;所述正三角形零件上的多个孔洞沿所述正三角形零件的一轴线对称设置。相应的,6个所述正三角形零件上的所述圆弧缺口1顺次贴合时能够形成所述组合通孔9,所述正三角形零件上的所述孔洞满足对称性原则使得所述正三角形零件满足可规则扩展的原则,与所述正六边形零件和所述正方形零件相比,所述正三角形零件的对称轴线只有一个,当使用所述正三角形零件形成所述
机器人的机体机构8时需要按照所述对称轴线安装,使其形成的所述机体机构8符合对称原则。
45.在一些实施例中,所述辅助件为法兰时,所述正三角形零件中部的所述孔洞为法兰孔洞6,所述法兰孔洞6用以连接所述法兰。所述正三角形零件的所述法兰孔洞6与其他多个所述孔洞均沿所述正三角形零件的一轴线对称设置。
46.所述正三角形零件和所述正方形零件上的所述法兰孔洞6结构相同,所述法兰孔洞6包括一个大孔洞和绕其均匀设置的八个小孔洞,其中四个小孔洞相对于所述轴线位于12点、3点、6点和9点方向,用以连接舵机法兰盘,其余四个小孔洞分别位于上述四个小孔洞的中间位置,且连接形成正方形结构,用以连接减速电机法兰盘。
47.本技术还提供一种可规则扩展的机器人机体机构,如图4和图5所示,包括连接件7及如上述所述的一种可规则扩展的机器人机体零件01,如图6所示,所述连接件7上设有与所述组合通孔9适配的第一通孔71,且所述第一通孔71外围设有与所述连接通孔2适配的第二通孔72,所述第二通孔72设有多个,所述紧固件穿过对应设置的所述组合通孔9和所述第一通孔71以及对应设置的所述连接通孔2和所述第二通孔72以在一平面内固定连接多个所述机体零件01。所述紧固件穿过所述组合通孔9和所述第一通孔71,将组成所述组合通孔9的多个所述机体零件01连接在一起,所述紧固件穿过所述第二通孔72和所述连接通孔2,将所述连接件7和所述机体零件01固定,使得所述机体零件01不会绕穿过所述组合通孔9和所述第一通孔71的所述紧固件转动,使得多个所述机体零件01组合形成的所述机体机构8更稳固。
48.在一些实施例中,所述连接件7上相对的两个所述第二通孔72设为腰型孔,当所述紧固件穿过所述第二通孔72与所述连接通孔2时,所述第二通孔72设为腰型孔,能够克服所述连接通孔2与所述第二通孔72之间相对的误差,便于所述紧固件的通过,使得所述连接件7与所述机体零件01的连接更简便。
49.如图4所示,为四个所述正六边形零件与四个所述正三角形零件组合形成的所述机体机构8,在平面上能够紧密贴合使得形成的所述机体机构8在平面上密铺,满足所述机器人的可规则扩展的需要,两个所述正六边形零件的所述圆弧缺口1和两个所述正三角形零件的所述圆弧缺口1形成所述组合通孔9,在所述组合通孔9处安装所述连接件7,并安装紧固件将构成所述圆弧缺口1的所述正六边形零件和所述正三角形零件固定连接。
50.如图5所示,为四个所述正方形零件组合形成的所述机体机构8,四个所述正方形零件的所述圆弧缺口1组合形成所述组合通孔9,在所述组合通孔9处安装所述连接件7,并安装紧固件将四个所述正方形零件固定连接。
51.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本技术的范围(包括权利要求)被限于这些例子;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明它们没有在细节中提供。
52.本实用新型的实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本实用新型的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1