一种具有双臂协作的机器人的制作方法
1.本实用新型涉及协作机器人技术领域,具体涉及一种具有双臂协作的机器人。
背景技术:
2.具有双臂协作的机器人是一种具备可伸缩的能力,固定性好,夹持稳定,具备三百六十度的转向能力,具备工作记录的能力。
3.现有的机器人,不具备可伸缩的能力,固定性较差,不具备三百六十度的转向能力,例如公告号cn201610643477.0公开的一种机器人,所述机器人包括机械手及示教装置。所述机械手用于执行操作任务,且所述机械手在执行操作任务时具有不同运动姿态。所述示教装置设置在所述机械手上以跟随所述机械手运动。所述示教装置包括显示单元,所述显示单元具有用于显示所述机械手的运转状态信息的显示区域。所述显示单元设置为跟随所述机械手的动作姿态而改变所述机械手的运转状态信息的显示方式所述机器人能够便于人眼清晰、舒适地观察,从而给操作带来了极大便利。
4.因此,发明一种具有双臂协作的机器人来解决上述不具备可伸缩的能力,固定性较差,不具备三百六十度的转向能力的问题。
技术实现要素:
5.本实用新型的目的是提供一种具有双臂协作的机器人,以解决技术中不具备可伸缩的能力,固定性较差,不具备三百六十度的转向能力的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种具有双臂协作的机器人,包括机体盒、电动圆形伸缩杆、旋转角度控制器、机器人手臂、驱动电机、爪手、支架板、旋钮、摄像机、旋转器、固定盘和固定孔,所述机体盒内部设置有电动圆形伸缩杆,所述电动圆形伸缩杆内部设置有旋转角度控制器,所述旋转角度控制器端部设置有机器人手臂,所述机器人手臂外表面设置有驱动电机,所述机器人手臂端部设置有爪手,所述机体盒顶部设置有电动矩形伸缩杆,所述电动矩形伸缩杆顶部设置有支架板,所述支架板外表面设置有旋钮,所述支架板顶部设置有摄像机,所述摄像机顶部设置有遮光板,所述机体盒底部设置有旋转器,所述旋转器底部固定连接有固定盘,所述固定盘外表面开设有固定孔,解决了不具备可伸缩的能力,固定性较差,不具备三百六十度的转向能力的问题。
7.优选的,所述电动圆形伸缩杆设置有两个,两个所述电动圆形伸缩杆对称,电动圆形伸缩杆可延伸机器人手臂。
8.优选的,所述旋转角度控制器设置有两个,两个所述旋转角度控制器对称,旋转角度控制器可以转动机器人手臂的方向。
9.优选的,所述机器人手臂设置有两个,两个所述机器人手臂对称,机器人手臂的数量。
10.优选的,所述驱动电机设置有八个,八个所述驱动电机每四个为一组,两组所述驱动电机对称,驱动电机驱动关节转动。
11.优选的,所述爪手设置有两个,两个所述爪手对称,爪手用于夹持抓取。
12.优选的,所述支架板设置有两个,两个所述支架板对称,支架板支撑摄像机。
13.优选的,所述固定孔开设有十二个,十二个所述固定孔每六个为一组,两组所述固定孔对称,固定孔便于连接固定。
14.在上述技术方案中,本实用新型提供的技术效果和优点:技术效果在于,机体盒、电动圆形伸缩杆、旋转角度控制器、机器人手臂、爪手、摄像机、旋转器和固定盘;优点在于,实现了具备可伸缩的能力,固定性好,夹持稳定,具备三百六十度的转向能力,具备工作记录的能力的优点。
附图说明
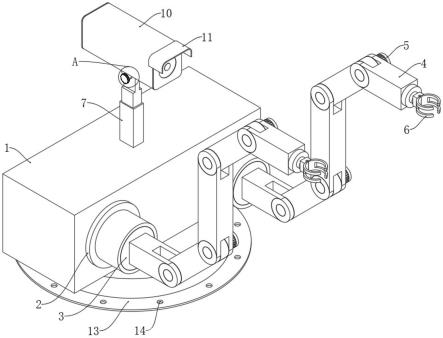
15.图1为本实用新型机体盒的整体结构示意图;
16.图2为本实用新型电动圆形伸缩杆的整体结构示意图;
17.图3为本实用新型旋转器的整体结构示意图;
18.图4为本实用新型图1的a处放大图。
19.附图标记说明:
20.1、机体盒;2、电动圆形伸缩杆;3、旋转角度控制器;4、机器人手臂;5、驱动电机;6、爪手;7、电动矩形伸缩杆;8、支架板;9、旋钮;10、摄像机;11、遮光板;12、旋转器;13、固定盘;14、固定孔。
具体实施方式
21.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
22.本实用新型提供了如图1-4所示的一种具有双臂协作的机器人,包括机体盒1、电动圆形伸缩杆2、旋转角度控制器3、机器人手臂4、驱动电机5、爪手6、支架板8、旋钮9、摄像机10、旋转器12、固定盘13和固定孔14,机体盒1内部设置有电动圆形伸缩杆2,电动圆形伸缩杆2内部设置有旋转角度控制器3,旋转角度控制器3端部设置有机器人手臂4,机器人手臂4外表面设置有驱动电机5,机器人手臂4端部设置有爪手6,机体盒1顶部设置有电动矩形伸缩杆7,电动矩形伸缩杆7顶部设置有支架板8,支架板8外表面设置有旋钮9,支架板8顶部设置有摄像机10,摄像机10顶部设置有遮光板11,机体盒1底部设置有旋转器12,旋转器12底部固定连接有固定盘13,固定盘13外表面开设有固定孔14。
23.电动圆形伸缩杆2设置有两个,两个电动圆形伸缩杆2对称,旋转角度控制器3设置有两个,两个旋转角度控制器3对称,机器人手臂4设置有两个,两个机器人手臂4对称,驱动电机5设置有八个,八个驱动电机5每四个为一组,两组驱动电机5对称,爪手6设置有两个,两个爪手6对称,支架板8设置有两个,两个支架板8对称,固定孔14开设有十二个,十二个固定孔14每六个为一组,两组固定孔14对称。
24.本实用工作原理:
25.参照说明书附图1-4,在使用本装置时,机器人手臂4通过爪手6抓取,通过电动圆形伸缩杆2的伸缩,辅助机器人手臂4的伸缩抓取,旋转角度控制器3辅助机器人手臂4的转动,驱动电机5用于驱动机器人手臂4关节的转动,爪手6用于抓取,电动矩形伸缩杆7用于摄
像机10的伸缩,旋钮9调转摄像机10的角度,旋转器12使机体盒1转动,便于机器人手臂4的转向,固定盘13的固定孔14便于固定。
技术特征:
1.一种具有双臂协作的机器人,包括机体盒(1)、电动圆形伸缩杆(2)、旋转角度控制器(3)、机器人手臂(4)、驱动电机(5)、爪手(6)、支架板(8)、旋钮(9)、摄像机(10)、旋转器(12)、固定盘(13)和固定孔(14),其特征在于:所述机体盒(1)内部设置有电动圆形伸缩杆(2),所述电动圆形伸缩杆(2)内部设置有旋转角度控制器(3),所述旋转角度控制器(3)端部设置有机器人手臂(4),所述机器人手臂(4)外表面设置有驱动电机(5),所述机器人手臂(4)端部设置有爪手(6),所述机体盒(1)顶部设置有电动矩形伸缩杆(7),所述电动矩形伸缩杆(7)顶部设置有支架板(8),所述支架板(8)外表面设置有旋钮(9),所述支架板(8)顶部设置有摄像机(10),所述摄像机(10)顶部设置有遮光板(11),所述机体盒(1)底部设置有旋转器(12),所述旋转器(12)底部固定连接有固定盘(13),所述固定盘(13)外表面开设有固定孔(14)。2.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述电动圆形伸缩杆(2)设置有两个,两个所述电动圆形伸缩杆(2)对称。3.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述旋转角度控制器(3)设置有两个,两个所述旋转角度控制器(3)对称。4.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述机器人手臂(4)设置有两个,两个所述机器人手臂(4)对称。5.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述驱动电机(5)设置有八个,八个所述驱动电机(5)每四个为一组,两组所述驱动电机(5)对称。6.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述爪手(6)设置有两个,两个所述爪手(6)对称。7.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述支架板(8)设置有两个,两个所述支架板(8)对称。8.根据权利要求1所述的一种具有双臂协作的机器人,其特征在于:所述固定孔(14)开设有十二个,十二个所述固定孔(14)每六个为一组,两组所述固定孔(14)对称。
技术总结
本实用新型公开了一种具有双臂协作的机器人,包括机体盒、电动圆形伸缩杆、旋转角度控制器、机器人手臂、驱动电机、爪手、支架板、旋钮、摄像机、旋转器、固定盘和固定孔,所述机体盒内部设置有电动圆形伸缩杆,所述电动圆形伸缩杆内部设置有旋转角度控制器,所述旋转角度控制器端部设置有机器人手臂,所述机器人手臂外表面设置有驱动电机,所述机器人手臂端部设置有爪手。本实用新型通过,技术效果在于,机体盒、电动圆形伸缩杆、旋转角度控制器、机器人手臂、爪手、摄像机、旋转器和固定盘;优点在于,实现了具备可伸缩的能力,固定性好,夹持稳定,具备三百六十度的转向能力,具备工作记录的能力的优点。的优点。的优点。
技术研发人员:张伟 武爽 王代华
受保护的技术使用者:苏州华旭自动化设备有限公司
技术研发日:2022.09.13
技术公布日:2023/1/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1