一种基于IDC的机器人定位机构的制作方法
一种基于idc的机器人定位机构
技术领域
1.本实用新型属于定位机构技术领域,更具体地说,特别涉及一种基于idc 的机器人定位机构。
背景技术:
2.idc是指一种拥有完善的设备,包括高速互联网接入带宽、高性能局域网络、安全可靠的机房环境、专业化的管理、完善的应用服务平台,工业机器人是一种多用途的和可重复编程的自动控制操作机,通常会用过idc对工业机器人进行变成控制,现有的通常是通过机器人中的定位机构对工件实现定位,便于对工件进行后序加工。
3.基于上述,本发明人发现存在以下问题:现在的机器人定位机构,在对工件进行定位时,对表面不平整的工件,难以对工件进行夹持定位,且定位效果不佳,工件易晃动,导致后续加工精度不高。
4.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种基于idc 的机器人定位机构,以期达到更具有更加实用价值性的目的。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种基于idc的机器人定位机构,以解决现在的现在的机器人定位机构,在对工件进行定位时,对表面不平整的工件,难以对工件进行夹持定位,且定位效果不佳,工件易晃动,导致后续加工精度不高的问题。
6.本实用新型基于idc的机器人定位机构的目的与功效,由以下具体技术手段所达成:
7.一种基于idc的机器人定位机构,包括防护壳,所述防护壳上侧固定安装有台面,所述驱动机构设置于台面下侧,所述夹持机构一侧与驱动机构相连接,所述夹持机构包括与台面转动连接的转盘,所述驱动机构驱动转盘沿其与台面连接处为圆心进行转动,四组所述定位机构均设置于台面上侧,所述定位机构一侧与夹持机构相连接,所述定位机构包括定位板,所述定位板一侧并排设置有三组定位块。
8.进一步的,所述驱动机构包括液压杆,所述液压杆两端分别固定连接有拉板,每组所述拉板一侧与台面一侧滑动连接。
9.进一步的,所述夹持机构还包括台面上开设的四组滑槽,每组所述滑槽内部滑动连接有工型块,每组所述工型块一侧转动连接有拉杆,每组所述拉杆一侧均与转盘转动连接。
10.进一步的,所述定位机构还包括与工型块一侧固定连接的承载板,所述承载板一侧与定位板滑动连接,所述定位板一侧固定安装有滑轨,所述滑轨内部滑动连接有两组u型块,两组所述u型块内部均转动连接有v型转杆,两组所述v型转杆一侧分别与相邻的一组定位块转动连接,两组所述v型转杆相邻的一侧转动连接有同一组定位块。
11.进一步的,所述滑轨两端分别转动连接有限位杆,每组所述限位杆一端与相邻一
侧的定位块转动连接,每组所述定位块上转动连接有限位环。
12.进一步的,所述定位板一侧固定连接有滑杆,所述滑杆一端滑动连接有固定块,所述滑杆外部套设有弹簧,所述弹簧一端与固定块固定连接。所述固定块一侧与承载板固定连接,所述承载板上滑动连接有两组竖板,两组所述竖板一侧均与定位板固定连接。
13.与现有技术相比,本实用新型具有如下有益效果:
14.1、本实用新型中,通过设置的夹持机构,液压杆收缩拉动两侧拉板,拉板推动相邻工型块,两组拉杆推动转盘进行转动,从而拉动另外两组拉杆并带动相对应连接的工型块移动,从而带动四组定位机构同时移动对工件进行夹持定位,同时对工件进行四向夹持,定位效果好;
15.2、通过设置的定位机构,定位块通过v型转杆和限位杆推动定位板,竖板对定位板限位,定位板推动滑杆,弹簧压缩,从而防止因夹持力度过大造成工件损伤,若工件表面不平整,定位块通过v型转杆推动u型块,u型块沿滑轨滑动,使三组定位块均能抵住工件表面,从而将工件夹持定位,夹持定位效果好,工件不易晃动。
附图说明
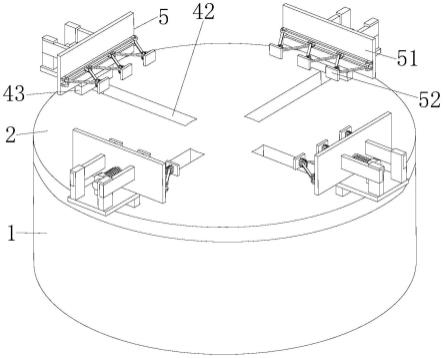
16.图1是本实用新型外观结构示意图;
17.图2是本实用新型夹持结构和驱动机构结合机构示意图;
18.图3是本实用新型定位机构结构示意图。
19.图中,部件名称与附图编号的对应关系为:
20.1、防护壳;2、台面;3、驱动机构;31、液压杆;32、拉板;4、夹持机构;41、转盘;42、滑槽;43、工型块;44、拉杆;5、定位机构;51、定位板;52、定位块;53、承载板;54、滑轨;55、u型块;56、v型转杆; 57、限位杆;58、限位环;59、滑杆;591、固定块;592、竖板。
具体实施方式
21.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
22.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
24.实施例:
25.请参阅图1-3,本实用新型提供一种基于idc的机器人定位机构,包括防护壳1,防护壳1上侧固定安装有台面2;
26.驱动机构3,驱动机构3设置于台面2下侧,驱动机构3包括液压杆 31,液压杆31两端分别固定连接有拉板32,每组拉板32一侧与台面2一侧滑动连接;
27.夹持机构4,夹持机构4一侧与驱动机构3相连接,夹持机构4包括与台面2转动连接的转盘41,驱动机构3驱动转盘41沿其与台面2连接处为圆心进行转动;
28.夹持机构4还包括台面2上开设的四组滑槽42,每组滑槽42内部滑动连接有工型块43,每组工型块43一侧转动连接有拉杆44,每组拉杆44一侧均与转盘41转动连接,液压杆31收缩,并拉动两侧拉板32,拉板32推动相邻工型块43,进而推动相邻拉杆44,两组拉杆44推动转盘41进行转动;
29.四组定位机构5,四组定位机构5均设置于台面2上侧,定位机构5一侧与夹持机构4相连接,定位机构5包括定位板51,定位板51一侧并排设置有三组定位块52;
30.定机构5还包括与工型块43一侧固定连接的承载板53,承载板53一侧与定位板51滑动连接,定位板51一侧固定安装有滑轨54,滑轨54两端分别转动连接有限位杆57,每组限位杆57一端与相邻一侧的定位块52转动连接,每组定位块52上转动连接有限位环58,滑轨54内部滑动连接有两组u型块 55,两组u型块55内部均转动连接有v型转杆56,v型转杆56由两组转动连接的直杆组成,两组v型转杆56一侧分别与相邻的一组定位块52转动连接,两组v型转杆56相邻的一侧转动连接有同一组定位块52;
31.定位板51一侧固定连接有滑杆59,滑杆59一端滑动连接有固定块591,滑杆59外部套设有弹簧,弹簧一端与固定块591固定连接。固定块591一侧与承载板53固定连接,承载板53上滑动连接有两组竖板592,两组竖板592 一侧均与定位板51固定连接,定位块52通过v型转杆56和限位杆57推动定位板51,竖板592对定位板51限位,定位板51推动滑杆59,弹簧压缩。
32.工作原理:对工件进行夹持定位时,启动液压杆31,液压杆31收缩,并拉动两侧拉板32,拉板32推动相邻工型块43,进而推动相邻拉杆44,两组拉杆44推动转盘41进行转动,从而拉动另外两组拉杆44并带动相对应连接的工型块43移动,从而带动四组定位机构5同时移动对工件进行夹持定位;
33.当定位机构5上的定位块52接触工件表面时,定位块52通过v型转杆 56和限位杆57推动定位板51,竖板592对定位板51限位,定位板51推动滑杆59,弹簧压缩,从而防止因夹持力度过大造成工件损伤;
34.若工件表面不平整,定位块52通过v型转杆56推动u型块55,u型块55 沿滑轨54滑动,使三组定位块52均能抵住工件表面,从而将工件夹持定位,夹持定位效果好,工件不易晃动。
35.本实用新型的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本实用新型限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本实用新型的原理和实际应用,并且使本领域的普通技术人员能够理解本实用新型从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1