具有路径规划的救火机器人
本技术涉及救火机器人,具体是具有路径规划的救火机器人。
背景技术:
1、近年来,机器人行业发达,越来越多程序式或危险的工作交由机器人来处理,消防机器人也应运而生,为了减小消防员工作时发生人身意外的概率,一些消防机器人可以代替消防员冲入火场进行灭火。
2、现有的救火机器人大都是通过在机器人装有摄像头,然后远程对其进行操控,而救火机器人在灭火时,可能由于火灾过程中产生的油烟,熏黑摄像头,从而导致摄像头视线不清,导致远程操作的人员无法对机器人进行控制,影响火灾扑灭的效率,因此,本实用新型提供了具有路径规划的救火机器人,以解决上述提出的问题。
技术实现思路
1、本实用新型的目的在于提供具有路径规划的救火机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
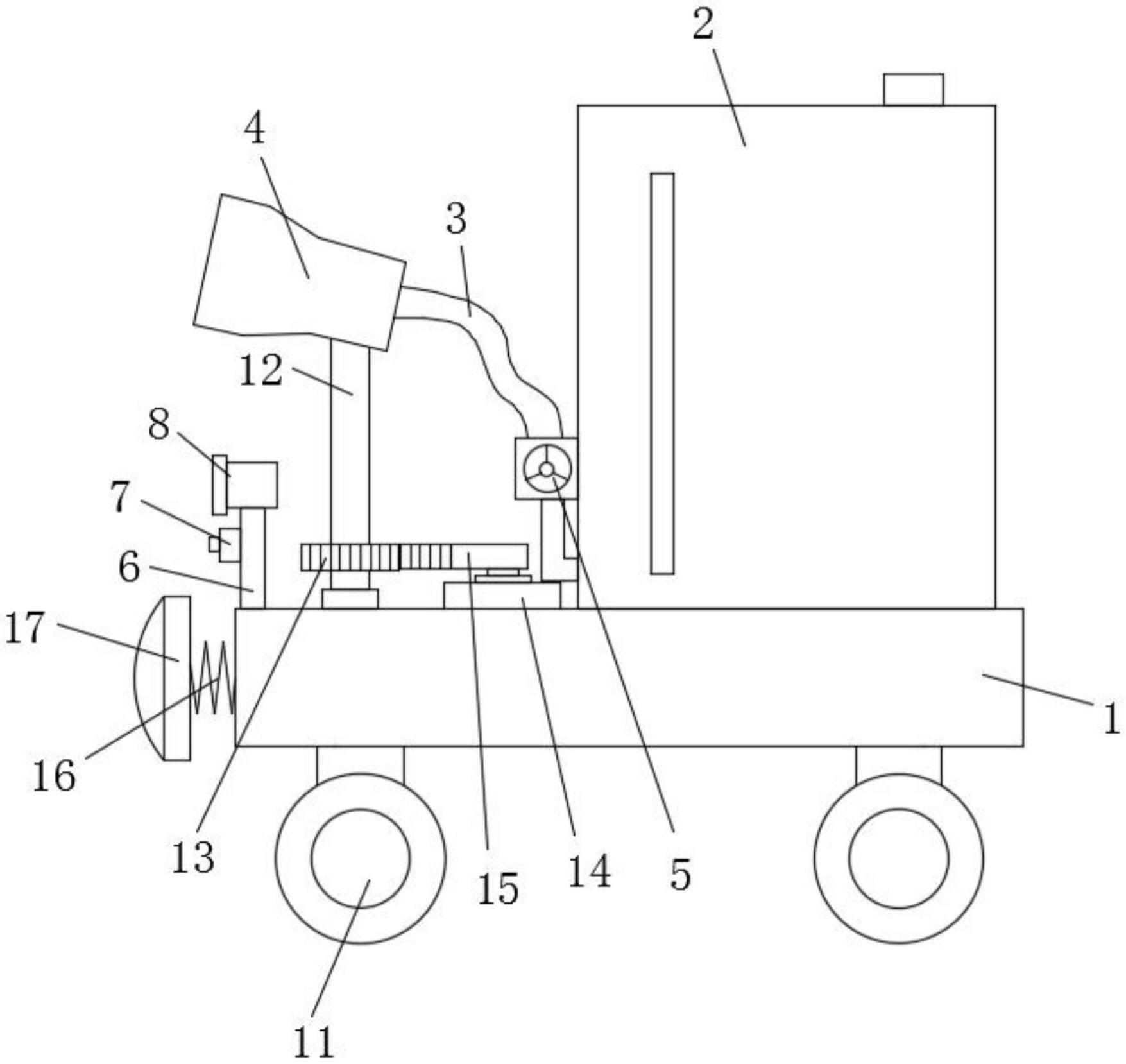
3、具有路径规划的救火机器人,包括底板,所述底板顶部的右侧固定连接有水箱,所述水箱左侧的底部连通有出水管,所述出水管的一端连通有喷头,所述出水管的表面连通有水泵,所述底板顶部的左侧固定连接有支撑杆,所述支撑杆的左侧固定连接有激光测距传感器,所述支撑杆的顶部固定连接有摄像头,所述底板内腔的左侧设置有主控机,所述底板内腔的右侧设置有蓄电池,所述底板底部的两侧均设置有驱动万向轮。
4、作为本实用新型进一步的方案,所述底板的顶部通过轴承活动连接有传动杆,所述传动杆的顶部与喷头固定连接。
5、作为本实用新型再进一步的方案,所述传动杆的表面设置有从动齿轮,所述底板的顶部开设有凹槽,且凹槽的内腔设置有电机。
6、作为本实用新型再进一步的方案,所述电机的输出轴固定连接有扇形齿轮,所述扇形齿轮与从动齿轮啮合。
7、作为本实用新型再进一步的方案,所述底板的左侧固定连接有弹簧,所述弹簧的左侧固定连接有防护板。
8、作为本实用新型再进一步的方案,所述水箱的顶部连通有进水管,所述水箱的表面设置有观察窗。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型,通过水箱、出水管、喷头和水泵的设置,共同构成了一个消防喷洒装置,通过摄像头的设置,能够将火灾现场的情况实时传播至远程指挥部,通过激光测距传感器探测机器人前方障碍物的距离信息,由主控机进行数据分析判断规划行进路径,与摄像头之间相互配合,可以更好的进行救火作业,通过驱动万向轮实现机器人行进过程中路径自主规划并避开障碍物。
技术特征:
1.具有路径规划的救火机器人,包括底板(1),其特征在于,所述底板(1)顶部的右侧固定连接有水箱(2),所述水箱(2)左侧的底部连通有出水管(3),所述出水管(3)的一端连通有喷头(4),所述出水管(3)的表面连通有水泵(5),所述底板(1)顶部的左侧固定连接有支撑杆(6),所述支撑杆(6)的左侧固定连接有激光测距传感器(7),所述支撑杆(6)的顶部固定连接有摄像头(8),所述底板(1)内腔的左侧设置有主控机(9),所述底板(1)内腔的右侧设置有蓄电池(10),所述底板(1)底部的两侧均设置有驱动万向轮(11)。
2.根据权利要求1所述的具有路径规划的救火机器人,其特征在于,所述底板(1)的顶部通过轴承活动连接有传动杆(12),所述传动杆(12)的顶部与喷头(4)固定连接。
3.根据权利要求2所述的具有路径规划的救火机器人,其特征在于,所述传动杆(12)的表面设置有从动齿轮(13),所述底板(1)的顶部开设有凹槽,且凹槽的内腔设置有电机(14)。
4.根据权利要求3所述的具有路径规划的救火机器人,其特征在于,所述电机(14)的输出轴固定连接有扇形齿轮(15),所述扇形齿轮(15)与从动齿轮(13)啮合。
5.根据权利要求1所述的具有路径规划的救火机器人,其特征在于,所述底板(1)的左侧固定连接有弹簧(16),所述弹簧(16)的左侧固定连接有防护板(17)。
6.根据权利要求1所述的具有路径规划的救火机器人,其特征在于,所述水箱(2)的顶部连通有进水管,所述水箱(2)的表面设置有观察窗。
技术总结
本技术公开了具有路径规划的救火机器人,属于救火机器人技术领域,包括底板,所述底板顶部的右侧固定连接有水箱,所述水箱左侧的底部连通有出水管,所述出水管的一端连通有喷头,所述出水管的表面连通有水泵,所述底板顶部的左侧固定连接有支撑杆。本技术,通过水箱、出水管、喷头和水泵的设置,共同构成了一个消防喷洒装置,通过摄像头的设置,能够将火灾现场的情况实时传播至远程指挥部,通过激光测距传感器探测机器人前方障碍物的距离信息,由主控机进行数据分析判断规划行进路径,与摄像头之间相互配合,可以更好的进行救火作业,通过驱动万向轮实现机器人行进过程中路径自主规划并避开障碍物。
技术研发人员:焦杨帅
受保护的技术使用者:河南科技学院
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!