一种仿生螃蟹机器人
1.本实用新型涉及多足步行机器人领域,尤其涉及一种仿生螃蟹机器人。
背景技术:
2.多足步行机器人的运动轨迹通常为一系列离散的足印运动,可以在可能到达的地面上选择最优的支撑点,因此多足步行机器人对崎岖地形的适应性强且对环境的破坏程度也较小。轮式和履带式机器人的运动轨迹则是一条连续的运动轨迹,在崎岖地形中往往含有岩石、泥土、沙子、甚至峭壁和陡坡等障碍物,使得可以稳定支撑机器人的连续路径十分有限,这意味着轮式和履带式机器人在这种地形中已经不适用。
3.在军事领域上,多足步行机器人能够帮助军队进行危险的扫雷任务和侦察任务,由于多足步行机器人全地形都适应的运动特点,因此可以完成轮式机器人许多无法完成的任务。在商用领域上,多足步行机器人具有搬运、避障、监测、娱乐、科普等功能,以及在恶劣环境下的搜救与探测等应用前景。但现有的多足步行机器人存在一些不足之处,例如相比自然界的节肢动物,仿生多足步行机器人的机动性还有很大差距,例如为仿生多足步行机器人与蟹腿的配合不灵活、不能单独控制蟹腿的运动或不具备钳螯,使得多足步行机器人在移动时不稳定,从而降低多足步行机器人对环境的适应性。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种具有较为成熟的行走系统和夹取系统的仿生螃蟹机器人。
5.根据本实用新型的第一方面实施例的仿生螃蟹机器人,包括躯干部,所述躯干部两侧对称位置分别设有若干个腿部组件,所述腿部组件包括第一传动组件、蟹腿下肢和蟹腿上肢,所述第一传动组件安装于所述躯干部上,所述蟹腿上肢与所述第一传动组件连接,所述蟹腿下肢与所述蟹腿上肢连接;多个钳螯部组件,多个所述钳螯部组件依次设置于所述躯干部的前端,所述钳螯部组件包括第二传动组件和蟹钳部,所述第二传动组件安装于所述躯干部的前端,所述蟹钳部与所述第二传动组件连接;其中,所述腿部组件能够驱动所述躯干部前后及左右移动或左右转动,所述第二传动组件能够驱动所述蟹钳部开合夹取物件。
6.根据本实用新型实施例的仿生螃蟹机器人,至少具有如下技术效果:
7.本实用新型通过第一传动组件驱动蟹腿上肢上下前后摆动,通过第一传动组件驱动蟹腿下肢左右摆动,第一传动组件能够单独驱动其中一个腿部组件移动,从而提高腿部组件的灵活性。第一传动组件能够驱动同一侧腿部组件同步移动,使得躯干部能够进行由不同动作组成的不同步态,例如:前进、后退、横行、旋转等不同的行走方式。本实用新型通过第二传动组件驱动蟹钳部开合,使得蟹钳部能够开合夹取路面的阻碍物件,从而提高躯干部和腿部组件移动的稳定性,从而提高本实用新型对环境的适应性。
8.根据本实用新型的一些实施例,位于所述躯干部左侧的所述腿部组件分别为一号
腿部组件、二号腿部组件和三号腿部组件,所述一号腿部组件、所述二号腿部组件和所述三号腿部组件均包括若干个所述第一传动组件、所述蟹腿下肢和所述蟹腿上肢。
9.根据本实用新型的一些实施例,位于所述躯干部右侧的所述腿部组件分别为四号腿部组件、五号腿部组件和六号腿部组件,所述四号腿部组件、所述五号腿部组件和所述六号腿部组件均包括若干个所述第一传动组件、所述蟹腿下肢和所述蟹腿上肢。
10.根据本实用新型的一些实施例,所述第一传动组件包括第一舵机、第二舵机、第一固定框和第二固定框,所述第一固定框设有安装槽,所述第二固定框通过所述安装槽与所述第一固定框连接形成放置位,所述第一舵机安装于所述放置位内,所述第二舵机安装于所述放置位内。
11.根据本实用新型的一些实施例,所述第一传动组件还包括第三舵机,所述第一舵机与所述躯干部连接,所述第二舵机与所述蟹腿上肢连接,所述蟹腿上肢通过所述第三舵机与所述蟹腿下肢连接。
12.根据本实用新型的一些实施例,所述蟹钳部包括左钳螯部、右钳螯部、第一齿轮部和第二齿轮部,所述左钳螯部与所述第一齿轮部一体成型,所述右钳螯部与所述第二齿轮部一体成型,所述第一齿轮部与所述第二齿轮部啮合。
13.根据本实用新型的一些实施例,所述第二传动组件包括至少两个第四舵机和至少两个第五舵机,所述第四舵机用于控制所述蟹钳部开合夹取物件,所述第五舵机用于控制所述蟹钳部左右摆动。
14.根据本实用新型的一些实施例,还包括超声波模块,所述超声波模块安装于所述躯干部上,所述超声波模块能够检测障碍并控制所述躯干部躲避障碍。
15.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过实用新型的实践了解到。
附图说明
16.本实用新型的附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
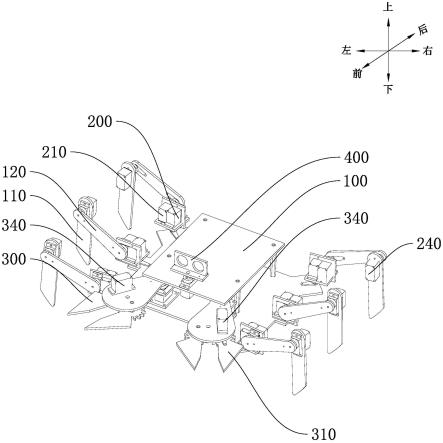
17.图1为本实用新型实施例的一种仿生螃蟹机器人的结构示意图;
18.图2为图1示出的一种仿生螃蟹机器人的仰视图;
19.图3为图1示出的一种仿生螃蟹机器人的主视图;
20.图4为图1示出的钳螯部组件的结构示意图;
21.图5为图1示出的钳螯部组件的侧视图;
22.图6为第一固定框和第二固定框的组装示意图。
23.附图标记:
24.躯干部100、蟹腿下肢110、蟹腿上肢120、一号腿部组件130、二号腿部组件140、三号腿部组件150、四号腿部组件160、五号腿部组件170、六号腿部组件180;
25.第一舵机200、第二舵机210、第一固定框220、安装槽221、第二固定框230、第三舵机240;
26.左钳螯部300、右钳螯部310、第一齿轮部320、第二齿轮部330、第四舵机340、第五舵机350;
27.超声波模块400。
具体实施方式
28.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
29.参照图1至图6所示,根据本实用新型实施例的一种仿生螃蟹机器人包括躯干部100和多个钳螯部组件。如图1、图2和图3所示,躯干部100左右两侧相对位置分别设有若干个腿部组件,腿部组件能够驱动躯干部100前后及左右移动或左右转动。腿部组件包括第一传动组件、蟹腿下肢110和蟹腿上肢120,第一传动组件与躯干部100连接,蟹腿上肢120一端与第一传动组件连接,蟹腿上肢120另一端与蟹腿下肢110连接。具体地,第一传动组件能够驱动蟹腿上肢120沿前后和/或上下方向摆动,第一传动组件能够驱动蟹腿下肢110沿左右方向摆动。本实用新型通过第一传动组件分别驱动蟹腿上肢120和蟹腿下肢110朝不同方向摆动,通过设置第一传动组件能够单独驱动其中一个腿部组件移动,从而提高腿部组件移动时的灵活性。如图4和图5所示,多个钳螯部组件依次设置于躯干部100的前端,钳螯部组件包括第二传动组件和蟹钳部,第二传动组件安装于躯干部100的前端,蟹钳部与第二传动组件连接,第二传动组件能够驱动蟹钳部开合以将路面上细小的物件夹取。
30.在本实用新型的一些实施例中,如图1和图2所示,为了便于下述结构的描述,本实施例将位于躯干部100左侧的腿部组件分别称为一号腿部组件130、二号腿部组件140和三号腿部组件150,本实施例将位于躯干部100右侧的腿部组件分别为四号腿部组件160、五号腿部组件170和六号腿部组件180。一号腿部组件130、二号腿部组件140和三号腿部组件150均包括若干个第一传动组件、蟹腿下肢110和蟹腿上肢120,四号腿部组件160、五号腿部组件170和六号腿部组件180均包括若干个第一传动组件、蟹腿下肢110和蟹腿上肢120。具体仿生螃蟹机器人向前或后行走步骤如下:当仿生螃蟹机器人要完成向前或后移动时,仿生螃蟹机器人处于初始状态,通过将二号腿部组件140、四号腿部组件160和六号腿部组件180抬起并向前或后摆动指定角度,然后保持角度不变分别将二号腿部组件140、四号腿部组件160和六号腿部组件180同步放下,最后通过分别回摆二号腿部组件140、四号腿部组件160和六号腿部组件180,使得二号腿部组件140、四号腿部组件160和六号腿部组件180回到原来角度;与此同时分别抬起一号腿部组件130、三号腿部组件150和五号腿部组件170并向前或后摆动指定角度,然后放下一号腿部组件130、三号腿部组件150和五号腿部组件170,通过分别回摆一号腿部组件130、三号腿部组件150和五号腿部组件170,从而将仿生螃蟹机器人向前或后移动后回到初始状态,从而完成向前或后移动的命令。具体仿生螃蟹机器人横向行走步骤如下:当仿生螃蟹机器人要完成向左或右移动时,仿生螃蟹机器人处于初始状态,通过将四号腿部组件160、五号腿部组件170和六号腿部组件180抬起并向左或右摆动指定角度,然后保持角度不变分别将四号腿部组件160、五号腿部组件170和六号腿部组件180组件同步放下,最后通过分别回摆四号腿部组件160、五号腿部组件170和六号腿部组件180,使得四号腿部组件160、五号腿部组件170和六号腿部组件180回到原来角度;与此同时分别抬起一号腿部组件130、二号腿部组件140和三号腿部组件150并向右或左摆动指定角
度,然后保持角度不变分别同步放下一号腿部组件130、二号腿部组件140和三号腿部组件150,最后通过分别回摆一号腿部组件130、二号腿部组件140和三号腿部组件150,从而仿生螃蟹机器人向左或右移动后回到初始状态,从而完成向左或右移动的命令。当仿生螃蟹机器人向左转动时,仿生螃蟹机器人处于初始状态,首先仿生螃蟹机器人分别将一号腿部组件130和三号腿部组件150抬起并向前摆动指定角度,五号腿部组件170抬起且向后摆动指定角度,随后放下一号腿部组件130、三号腿部组件150和五号腿部组件170,接着回摆一号腿部组件130、三号腿部组件150和五号腿部组件170使其回到原来角度;同时分别抬起二号腿部组件140、四号腿部组件160和六号腿部组件180,并将二号腿部组件140向前摆动指定角度,四号腿部组件160和六号腿部组件180向后摆动指定角度,然后放下二号腿部组件140、四号腿部组件160和六号腿部组件180,接着回摆二号腿部组件140、四号腿部组件160和六号腿部组件180,使得仿生螃蟹机器人最后回到初始状态并完成向左转动。当仿生螃蟹机器人向右转动时,仿生螃蟹机器人处于初始状态,首先仿生螃蟹机器人分别将四号腿部组件160和六号腿部组件180抬起并向前摆动指定角度,二号腿部组件140抬起且向后摆动指定角度,随后放下二号腿部组件140、四号腿部组件160和六号腿部组件180,接着回摆二号腿部组件140、四号腿部组件160和六号腿部组件180使其回到原来角度;同时分别抬起一号腿部组件130、三号腿部组件150和五号腿部组件170,并将五号腿部组件170向前摆动指定角度,一号腿部组件130和三号腿部组件150向后摆动指定角度,然后放下一号腿部组件130、三号腿部组件150和五号腿部组件170,接着回摆一号腿部组件130、三号腿部组件150和五号腿部组件170,使得仿生螃蟹机器人最后回到初始状态并完成向右转动。
31.在本实用新型的进一步实施例中,如图6所示,第一传动组件包括第一舵机200、第二舵机210、第一固定框220和第二固定框230,第一固定框220设有安装槽221,第二固定框230通过安装槽221与第一固定框220连接形成放置位,第一舵机200安装于放置位内,第二舵机210安装于放置位内。为了便于第一舵机200和第二舵机210的安装,通过采用第一固定框220和第二固定框230连接形成放置位,使得第一舵机200和第二舵机210紧密地连接组成第一传动组件,从而节省了第一传动组件所需的空间体积,使得第一传动组件结构紧凑。
32.在本实用新型的一些实施例中,如图1所示,第一传动组件还包括第三舵机240,第一舵机200与躯干部100连接,第二舵机210与蟹腿上肢120连接,蟹腿上肢120通过第三舵机240与蟹腿下肢110连接。通过采用第一舵机200控制蟹腿上肢120沿前后的方向转动,通过采用第二舵机210控制蟹腿可以在竖直方向上的旋转移动,带动蟹腿上肢120在竖直方向上的移动。
33.在本实用新型的进一步实施例中,如图1、图2、图4和图5所示,蟹钳部包括左钳螯部300、右钳螯部310、第一齿轮部320和第二齿轮部330。左钳螯部300与第一齿轮部320一体成型,右钳螯部310与第二齿轮部330一体成型,第一齿轮部320与第二齿轮部330啮合,使得第二传动组件控制第一齿轮部320左右转动时,第二齿轮部330同步转动,从而使得左钳螯部300和右钳螯部310张开或闭合。通过设置第一齿轮部320与第二齿轮部330啮合,从而节省了第二传动组件的数量。
34.在本实用新型的一些实施例中,如图1、图3和图5所示,第二传动组件包括至少两个第四舵机340和至少两个第五舵机350,第四舵机340和第五舵机350可为两个。位于左侧的第四舵机340与第一齿轮部320连接,位于右侧的第四舵机340与第二齿轮部330连接,第
五舵机350用于控制蟹钳部左右摆动。通过第四舵机340控制第一齿轮部320左右转动,从而带动第二齿轮部330左右转动,使得左钳螯部300和右钳螯部310张开或闭合。通过第四舵机340控制第二齿轮部330左右转动,从而带动第一齿轮部320左右转动,使得左钳螯部300和右钳部310张开或闭合。通过设置第四舵机340控制蟹钳部可通过开合方式夹取细小物件,从而辅助腿部组件进行移动。
35.在本实用新型的进一步实施例中,如图1所示,还包括超声波模块400和控制系统,控制系统能够控制第一传动组件和第二传动组件运作,超声波模块400安装于躯干部100上,控制系统与超声波模块400电连接,超声波模块400能够检测障碍并发送信息到控制系统,控制系统控制躯干部100躲避障碍,从而使得仿生螃蟹机器人具备自动避障功能。控制系统可包括mega 2560控制板和舵机控制板,从而控制仿生螃蟹机器人中每个腿部组件能够单独移动,从而提高仿生螃蟹机器人各个腿部组件配合的灵活性。
36.在本说明书的描述中,参考术语“一些实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
37.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1