具有多级收纳存储的运载机器人的制作方法
1.本实用新型涉及机器人领域,尤其涉及一种具有多级收纳存储的运载机器人。
背景技术:
2.随着社会的发展很多场合都用机械设备替代人工,机械替人具有众多优点,例如搬运装载储存一些有毒有害物品,更是需要避免人员直接接触;尤其是医院场景中,医护人员经常要面对医疗废物的搬运问题,如果直接搬运医疗废物,危险系数高,且医护人员劳动强度大,因此,采用一些机械设备,例如机器人来支持医护人员的工作则可避免上述问题。
3.通过利用机器人替代人工搬运装载储存一些医疗废物时,可以避免医护人员对此类物体的直接接触,有效的降低医护人员的危险系数,同时也降低了医护人员的劳动强度。但是,医院的场景特殊,楼道与病房的过道相对狭窄,因此设计一款适合医院场景使用的运载机器人很有必要。
技术实现要素:
4.本实用新型提供了一种具有多级收纳存储的运载机器人,具有既可以搬运医疗废物又可以搬运病床的效果。具体技术方案如下:
5.一种具有多级收纳存储的运载机器人,其中,包括移动装置和承托组件,移动装置用于运载机器人的移动,承托组件设置在移动装置上方,承托组件可放置病床;移动装置上竖向设置有支架组件,支架组件上设置有旋转组件,旋转组件与抓取组件相连,旋转组件可带动抓取组件旋转,抓取组件可抓取病床并放置在承托组件上。
6.进一步,抓取组件与翻转组件相连,翻转组件与旋转组件相连,旋转组件可带动翻转组件与抓取组件整体向左或向右旋转;翻转组件可带动抓取组件整体向上或向下翻转。
7.进一步,旋转组件与吊臂组件相连,吊臂组件设置在支架组件上,吊臂组件可带动旋转组件、翻转组件以及抓取组件沿水平方向移动,以增大抓取组件的有效工作范围。
8.进一步,旋转组件包括旋转电机,旋转电机与第一锥齿轮相连,第一锥齿轮与第二锥齿轮相捏合,第二锥齿轮的齿轮轴与吊臂组件相连,第二锥齿轮固定设置在翻转组件上,旋转电机可通过第一锥齿轮和第二锥齿轮驱动翻转组件相对于吊臂组件向左或向右转动。
9.进一步,抓取组件包括第一夹爪和第二夹爪,第一夹爪和第二夹爪的内侧设置有夹取槽,夹取槽可与病床相卡接,第一夹爪和第二夹爪可相向移动或背离移动,以改变第一夹爪和第二夹爪之间的距离,以实现对块状物品或病床的夹取。
10.进一步,第一夹爪和第二夹爪的内侧面上设置有限位凸台,以保证每次抓取块状物品的位置的一致性。
11.进一步,支架组件上方设置有收纳存储组件,收纳存储组件位于抓取组件的上方,收纳存储组件上设置有多个收纳槽,收纳存储组件和承托组件可相对于抓取组件转动,以便于抓取组件将抓取到的块状物品存放在指定的收纳槽中。
12.进一步,支架组件上方设置有限位组件,限位组件为环形,限位组件套设在收纳存
储组件的外侧,以防止收纳槽内的块状物品掉落。
13.进一步,限位组件上设置有开口,开口与抓取组件相对应,抓取组件可通过开口将块状物品放入收纳槽中或从收纳槽中取出。
14.进一步,承托组件包括承托架,承托架固定设置在移动装置上方,承托架上设置有四个轮槽,病床的四个轮子可容置在轮槽内,以实现对病床的承托。
15.本实用新型的具有多级收纳存储的运载机器人,自动化程度高,可替代人工搬运医疗废物,避免了医护人员对此类物体的直接接触,有效的降低医护人员的危险系数,同时也降低了医护人员的劳动强度;同时通过设置在移动装置上的承托组件,可使运载机器人可搬运病床,大大提高了搬运效率,进一步降低了医护人员的劳动强度。
16.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
附图说明
17.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
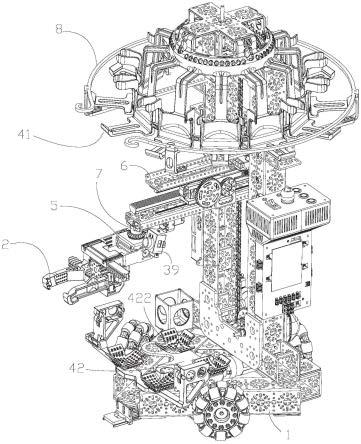
18.图1为本实用新型的具有多级收纳存储的运载机器人的使用状态立体图1;
19.图2为本实用新型的具有多级收纳存储的运载机器人的使用状态立体图2;
20.图3为本实用新型的具有多级收纳存储的运载机器人的夹爪组件的局部示意图;
21.图4为本实用新型的具有多级收纳存储的运载机器人的升降组件的立体图;
22.图5为本实用新型的具有多级收纳存储的运载机器人的抓取组件的立体图1;
23.图6为本实用新型的具有多级收纳存储的运载机器人的抓取组件的立体图2;
24.图7为本实用新型的具有多级收纳存储的运载机器人的收纳存储组件的立体图。
具体实施方式
25.为了更好地了解本实用新型的目的、功能以及具体设计方案,下面结合附图,对本实用新型的具有多级收纳存储的运载机器人作进一步详细的描述。
26.如图1-7所示,本实用新型的具有多级收纳存储的运载机器人,包括移动装置1,移动装置1用于运载机器人的移动,本实施例的移动装置1为无线遥控车。移动装置1上竖向设置有支架组件3,支架组件3上设置有旋转组件7,旋转组件7与抓取组件2相连,旋转组件7可带动抓取组件2旋转,移动装置1上设置有承托组件42,承托组件42可承托病床,抓取组件2可抓取病床并放置在承托组件42上。
27.本实施例的支架组件3上还设置有收纳存储组件41,收纳存储组件41和承托组件42分别位于抓取组件2的上方和下方,收纳存储组件41上设置有多个收纳槽45,收纳存储组件41可相对于抓取组件2转动,抓取组件2还可抓取块状物品(药品或者医疗废物),抓取到的块状物品可存放在指定的收纳槽45中。即抓取组件2可以根据实际需求,将抓取到的物品存放在多个收纳槽45中的某一个收纳槽45中。
28.优选的,支架组件3上方设置有限位组件8,限位组件8为环形,限位组件8套设在收
纳存储组件41的外侧,以防止运输过程中,收纳槽45内的块状物品掉落。值得注意的是,限位组件8上设置有开口,开口设置在与抓取组件2相对应的位置处,抓取组件2可通过开口将块状物品放入收纳槽45中或从收纳槽45中取出。
29.支架组件3上设置有升降组件,升降组件上设置有旋转组件7,旋转组件7与翻转组件5相连,抓取组件2设置在翻转组件5上,升降组件可带动旋转组件7、翻转组件5和抓取组件2竖向移动,抓取组件2可抓取物品;本实施例的收纳存储组件41设置在支架组件3的顶部位置处,承托组件42设置在支架组件3的底部位置处,升降组件带动旋转组件7、翻转组件5和抓取组件2竖向移动,旋转组件7可带动翻转组件5与抓取组件2整体向左或向右旋转,翻转组件5可带动抓取组件2向上或向下翻转,以将抓取到的块状物品存放在收纳存储组件41的收纳槽45中,从而使运载机器人可同时运载多个物品,提高运载机器人的效率。
30.具体来说,升降组件包括链条传动组件,链条传动组件设置在支架组件3上。支架组件3包括立柱31,立柱31竖向设置在移动装置1上,链条传动组件与立柱31相连,本实施例的立柱31为两根,竖向固定设置在移动装置1上,链条传动组件设置在两根立柱31之间。链条传动组件上设置有升降台36,旋转组件7设置在升降台36上,链条传动组件通过升降台36带动旋转组件7、翻转组件5和抓取组件2沿立柱31竖向移动。
31.如图4所示,链条传动组件包括升降从动轮32、升降主动轮33、链条34以及升降驱动元件35。两根立柱31上端的中间位置处设置有升降从动轮32,两根立柱31下端的中间位置处设置有升降主动轮33,升降从动轮32与升降主动轮33上套设有链条34。升降主动轮33与升降驱动元件35相连,升降驱动元件35可带动升降主动轮33旋转从而带动链条34移动。
32.链条34上设置有升降台36,升降台36可随链条34的移动而进行升降,从而实现抓取组件2的升降。本实施例的升降台36上设置有多个导向轮,导向轮可与立柱31相卡接并沿立柱上下移动,导向轮可增强升降台36移动时的稳定性。
33.优选的,如图1和图2所示,升降台36上设置有吊臂组件6,吊臂组件6与旋转组件7相连,吊臂组件6可带动旋转组件7水平移动,从而带动翻转组件5与抓取组件2沿水平方向移动,以增大抓取组件2的有效工作范围。吊臂组件6包括第一吊臂梁61和第二吊臂梁62,第一吊臂梁61和第二吊臂梁62相对的一侧设置有吊臂齿条,两条吊臂齿条之间设置有吊臂驱动轮63,吊臂驱动轮63转动可带动第一吊臂梁61和第二吊臂梁62相对移动,以实现带动抓取组件2沿水平方向移动的功能。
34.优选的,为了方便抓取组件2抓取物品,吊臂组件6的前端位置处设置有视觉模块39,操作人员可根据摄像头拍摄的画面控制抓取组件2更准确的抓取物品。本实施例的升降驱动元件35采用带有编码器的直流减速电机,通过直流减速电机的编码器进行反馈,通过pid调节,实现特定高度精确停留。
35.优选的,立柱31顶端还设置有限位开关38,当升降台36与限位开关38相抵触时,升降驱动元件35断电,防止升降台36移动过高与其他零部件发生碰撞,造成设备的损坏,同理,立柱31的下方也设置有限位开关38。
36.如图5-6所示,本实施例的抓取组件2包括第一夹爪21和第二夹爪22,第一夹爪21和第二夹爪22可相向移动或背离移动,以改变第一夹爪21和第二夹爪22之间的距离,从而夹取块状物品或者病床。
37.具体来说,抓取组件2包括夹爪驱动元件23,夹爪驱动元件23与夹爪主动齿轮24相
连,夹爪主动齿轮24的两侧分别与第一齿条25和第二齿条26相啮合,第一齿条25和第二齿条26分别与第一夹爪21和第二夹爪22相连,夹爪驱动元件23驱动夹爪主动齿轮24转动以使第一齿条25和第二齿条26相向移动或背离移动,从而驱动第一夹爪21和第二夹爪22平行相向移动或平行背离移动,以实现第一夹爪21和第二夹爪22的夹取功能。
38.第一夹爪21和第二夹爪22的内侧面设置有夹取槽210,夹取槽210可与病床的床板相卡接。具体来说,第一夹爪21和第二夹爪22伸入到病床的两侧,然后闭合第一夹爪21和第二夹爪22,使夹取槽210与病床的床板相卡接,从而实现病床的夹取。优选的,夹取槽210的开口处设置有导向面,以方便板状结构卡接至夹取槽210内。
39.第一夹爪21和第二夹爪22的内侧面上设置有限位凸台211,以保证每次抓取块状物品的时候,块状物品位置的一致性,限位凸台211靠近夹爪开口的一侧设置有限位导向部,限位导向部为倾斜面,限位导向部可对夹取的块状物品起到导向的作用,以使每次夹取的块状物品均在斜坡的前方位置处(倾斜面与第一夹爪21和第二夹爪22的内侧面相交的位置处)。
40.抓取组件2包括安装支架27,安装支架27为类“u”型,夹爪驱动元件23固定设置在安装支架27上,夹爪驱动元件23与夹爪主动齿轮24相连,夹爪主动齿轮24设置在安装支架27“u”型的中间位置处,安装支架27“u”型的两侧壁上设置有第一滑槽和第二滑槽,第一齿条25和第二齿条26分别活动设置在第一滑槽和第二滑槽内,以提高第一齿条25和第二齿条26移动时的稳定性。
41.安装支架27与翻转组件5相连,翻转组件5可带动安装支架27与第一夹爪21和第二夹爪22整体向上或向下翻转,以增大抓取组件2的有效工作范围。
42.翻转组件5包括翻转臂51,翻转臂51的一端与安装支架27相连,翻转臂51的另一端与翻转驱动机构54相连,翻转驱动机构54可驱动翻转臂51转动,从而实现安装支架27与第一夹爪21和第二夹爪22的整体向上或向下翻转。本实施例的翻转驱动机构54设置在翻转安装板55上,翻转安装板55与旋转组件7相连。
43.旋转组件7包括旋转电机,旋转电机与第一锥齿轮相连,第一锥齿轮与第二锥齿轮相啮合,第二锥齿轮的齿轮轴与吊臂组件6相连,第二锥齿轮固定设置在翻转组件5的翻转安装板55上,旋转电机可通过第一锥齿轮和第二锥齿轮驱动翻转组件5相对于吊臂组件6向左或向右转动。
44.如图7所示,收纳存储组件41包括收纳架体411和收纳组件412,收纳架体411固定设置在支架组件3的顶部,收纳组件412与收纳架体411相连,多个收纳槽45设置在收纳组件412上。运载机器人抓取的物品可放置在收纳槽45中,即抓取组件2抓取的物品可放置在收纳槽45中。
45.具体来说,本实施例的收纳组件412包括连接板43和储物架44,连接板43的与储物架44相连,储物架44上设置有多个收纳槽45,实际数量根据需求设计。抓取组件2所抓取的物品通过升降组件运输至支架组件3上方,然后通过翻转组件5将抓取组件2抓取的物品放置到其中一个收纳槽45内进行存储。优选的,为了防止收纳槽45内的物品掉出,收纳槽45的底部倾斜设置。
46.优选的,本实施例的储物架44活动设置在收纳架体411上,储物架44可相对于收纳架体411转动,以便于物品能够放置在不同的收纳槽45中。为了实现上述目的,本实施例的
连接板43可相对于收纳架体411旋转,以带动储物架44旋转,从而使抓取组件2可将抓取的物品放置在不同的收纳槽45内。
47.具体来说,收纳架体411内设置有第一旋转驱动元件,第一旋转驱动元件与旋转轴46相连,旋转轴46与连接板43相连,第一旋转驱动元件可通过旋转轴46带动连接板43旋转,为了方便控制,本实施例的第一旋转驱动元件采用角度舵机。储物架44为圆形,圆形的圆心与旋转轴46的轴线相重合,以使圆形的圆心与储物架44的转动轴线相重合,圆形的储物架44上均布有多个收纳槽45。
48.如图1和图2所示,承托组件42包括承托架体421,承托架体421固定设置在支架组件3的下方位置处,本实施例的承托架体421设置在移动装置1的上方,承托架体上设置有四个轮槽422,抓取组件2吊装的病床可放置在承托架体421上,并且病床的四个轮子可放置在轮槽422内,以实现病床的承托。由于病床的轮子均容置在轮槽422内,病床运输时的稳定性好。
49.本实施例的运载机器人在使用时,通过遥控控制各个驱动元件运转,当抓取组件2抓取物品后,通过升降组件将物品运送至升降组件上方,通过翻转组件5将块状物品放入收纳槽45内,以实现对物品的收纳,之后抓取组件2可通过升降组件下降并夹取另一个物品,然后再通过升降组件将物品送至升降组件上方,此时旋转收纳组件412将空的收纳槽45对准抓取组件2,通过翻转组件5将块状物品放入收纳槽45内,以实现对块状物品的收纳。如需取出块状物品,将上述操作方向操作即可,在此不做赘述。当需要搬运病床时,第一夹爪21和第二夹爪22伸入到病床的两侧,然后闭合第一夹爪21和第二夹爪22,使夹取槽210与病床的床板相卡接,然后将病床吊起,并移动至承托组件42上方,然后将病床放置在承托组件42上,使病床的四个轮子容置在轮槽47内,即可对病床进行运输。
50.本实用新型的具有多级收纳存储的运载机器人,自动化程度高,可替代人工搬运医疗废物,避免了医护人员对此类物体的直接接触,有效的降低医护人员的危险系数,同时也降低了医护人员的劳动强度;同时通过设置在移动装置上的承托组件,可使运载机器人可搬运病床,大大提高了搬运效率,进一步降低了医护人员的劳动强度。
51.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1