一种液压机械手的制作方法
1.本实用新型涉及液压机械手技术领域,具体涉及一种液压机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。
4.按驱动方式可分为液压式、气动式、电动式、机械式。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
5.当机械手用于教学领域时,教师通常会利用机械手的运行来向学生们展示机械手的工作原理,以此来使得学生能够更好地掌握住有关机械手的相关知识。
6.如公告为cn213439728u,名称为《一种液压机械手》的中国专利,包括底座,所述底座的顶部安装有壳体,所述壳体为中空的长方体结构,所述壳体的侧面安装有第一电机,所述第一电机的输出轴插入壳体的内部并连接有蜗杆,所述壳体的内部转动连接有转轴,所述转轴上固定套接有蜗轮,所述蜗轮与蜗杆啮合传动,所述转轴贯穿壳体的顶部并连接有支撑柱,所述支撑柱的内部安装有第一液压缸,所述第一液压缸的活塞杆的顶部安装有滑板,所述滑板的顶部安装有第一导向轴,所述第一导向轴的顶部固定有滑套,所述滑套的侧面转动连接有第二液压缸,所述滑套的顶部固定有支撑板,所述支撑板的侧面固定有第二导向轴,所述第二导向轴上滑动套接有安装架,所述第二液压缸的输出轴与安装架转动连接,所述安装架上安装有第二电机,所述第二电机的输出轴贯穿安装架并连接有机械手机构。上述专利解决了通过对机械手机构的调整实现对产品位置的调整,从而方便产品组装,有效避免了重复装夹的现象出现,大大提高了生产效率的问题。
7.上述专利的不足之处在于:由于上述专利所提出的液压机械手是刚性连接的,当上述专利所提出的液压机械手用于教学领域时,很容易导致由于不方便对不同规格的液压机械手进行更换,使得学生所能掌握的液压机械手相关知识会比较有限,因此不仅在一定程度上降低了液压机械手的实用性,而且还降低了液压机械手的教学效果。
技术实现要素:
8.本实用新型的目的是提供一种液压机械手,以解决现有技术中的上述不足之处。
9.为了实现上述目的,本实用新型提供如下技术方案:一种液压机械手,包括底座和设置在底座上的第二液压缸,所述第二液压缸的输出端设置有机械手主体;所述第二液压缸和机械手主体之间设置有用于夹持机械手主体的夹持组件;所述夹持组件包括固定连接在所述第二液压缸上的安装盒,所述安装盒上固定设置有多个连接框,多个所述连接框的内壁均滑动连接有卡板,所述机械手主体上开设有多个与各所述卡板相配合的卡槽;各所述连接框和各卡板之间均设置有弹性件。
10.进一步地,所述底座上转动连接有第一转盘,所述第一转盘上固定安装有第一液压缸,所述第一液压缸的输出端固定连接有第二转盘,所述第二液压缸固定安装在所述第二转盘上。
11.进一步地,所述安装盒的周面上固定连接有多个连接板,各所述连接板与各所述连接框一一对应地固定连接。
12.进一步地,所述弹性件为弹簧,所述弹簧的两端分别与连接框和卡板固定连接。
13.进一步地,各所述卡板上均滑动插设有限位杆,所述限位杆的一端与连接框固定连接,所述弹簧套设在所述限位杆上。
14.进一步地,各所述连接框上均螺纹连接有螺栓,所述卡板靠近螺栓的一侧开设有与螺栓相配合的第一螺纹槽和第二螺纹槽。
15.进一步地,所述安装盒的内壁固定连接有多个定位块,所述机械手主体上开设有多个与各所述定位块相配合的定位槽。
16.在上述技术方案中,本实用新型提供一种液压机械手,具备以下有益效果:在需要对不同规格的机械手主体进行更换时,拉动安装盒上各连接框中卡板,使得各卡板能够往远离安装盒的方向进行移动,然后将待更换的机械手主体放置在安装盒中,然后使得各连接框中的卡板能够在相对应弹性件的作用下,卡进机械手主体上相对应的卡槽中,从而使得机械手主体能够被夹持在安装盒中,通过利用夹持组件,起到了能够方便对不同规格的液压机械手进行更换,使得学生能够尽可能多地掌握到液压机械手的相关知识,从而不仅提高了液压机械手的实用性,而且还提高了液压机械手的教学效果。
附图说明
17.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
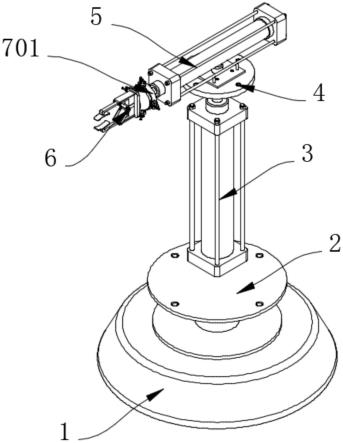
18.图1为本实用新型实施例提供的整体的结构示意图;
19.图2为本实用新型实施例提供的图1的部分拆解结构示意图;
20.图3为本实用新型实施例提供的图2中a处的结构示意图;
21.图4为本实用新型实施例提供的图1中安装盒的部分结构示意图;
22.图5为本实用新型实施例提供的图1中机械手主体的结构示意图。
23.附图标记说明:
24.1、底座;2、第一转盘;3、第一液压缸;4、第二转盘;5、第二液压缸;6、机械手主体;
701、安装盒;702、连接板;703、连接框;704、卡板;705、卡槽;706、弹性件;707、限位杆;708、螺栓;709、第一螺纹槽;710、第二螺纹槽;711、定位块;712、定位槽。
具体实施方式
25.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
26.请参阅图1-5,本实用新型实施例提供的,包括底座1和设置在底座1上的第二液压缸5,第二液压缸5的输出端设置有机械手主体6;第二液压缸5和机械手主体6之间设置有用于夹持机械手主体6的夹持组件;夹持组件包括固定连接在第二液压缸5上的安装盒701,安装盒701上固定设置有多个连接框703,多个连接框703的内壁均滑动连接有卡板704,机械手主体6上开设有多个与各卡板704相配合的卡槽705;各连接框703和各卡板704之间均设置有弹性件706;在需要对不同规格的机械手主体6进行更换时,拉动安装盒701上各连接框703中卡板704,使得各卡板704能够往远离安装盒701的方向进行移动,然后将待更换的机械手主体6放置在安装盒701中,然后使得各连接框703中的卡板704能够在相对应弹性件706的作用下,卡进机械手主体6上相对应的卡槽705中,从而使得机械手主体6能够被夹持在安装盒701中,通过利用夹持组件,起到了能够方便对不同规格的液压机械手进行更换,使得学生能够尽可能多地掌握到液压机械手的相关知识,从而不仅提高了液压机械手的实用性,而且还提高了液压机械手的教学效果。
27.具体的,底座1上转动连接有第一转盘2,第一转盘2上固定安装有第一液压缸3,第一液压缸3的输出端固定连接有第二转盘4,第二液压缸5固定安装在第二转盘4上;利用第一转盘2,起到了能够对机械手主体6的转动角度进行调节的作用;利用第一液压缸3,起到了能够对机械手主体6的高度进行调节的作用;利用第二液压缸5,起到了能够对机械手主体6的拉伸长度进行调节的作用。
28.具体的,安装盒701的周面上固定连接有多个连接板702,各连接板702与各连接框703一一对应地固定连接;利用各连接板702,起到了能够方便件各连接框703与安装盒701进行相连接的作用。
29.具体的,弹性件706为弹簧,弹簧的两端分别与连接框703和卡板704固定连接;在将更换后的液压机械手放置进安装盒701中适当位置之后,利用弹簧,使得各卡板704能够在弹簧弹力的作用下,插进至机械手主体6上相对应卡槽705中,从而对安装盒701中的机械手主体6进行夹持的效果。
30.具体的,各卡板704上均滑动插设有限位杆707,限位杆707的一端与连接框703固定连接,弹簧套设在限位杆707上;利用限位杆707,起到了能够对弹簧进行限位的作用。
31.具体的,各连接框703上均螺纹连接有螺栓708,卡板704靠近螺栓708的一侧开设有与螺栓708相配合的第一螺纹槽709和第二螺纹槽710;在需要对不同规格的机械手主体6进行更换时,拉动各连接框703中的卡板704,使得各卡板704能够往远离安装盒701的方向进行移动,从而使得各卡板704能够从液压机械手上的各卡槽705中取出,此时弹簧便会处于被拉伸的状态,进而使得原机械手主体6能够从安装盒701中取下,然后转动螺栓708,使得螺栓708转进至相对应卡板704上的第一螺纹槽709中,从而对卡板704的滑动限制,尽量避免了由于卡板704的滑动,对机械手主体6的更换过程造成阻碍的情况发生;在将更换后
的机械手主体6放置在安装盒701中的适当位置之后,转动连接框703上的螺栓708,使得螺栓708能够从卡板704上的第一螺纹槽709中取出,此时卡板704便会在弹簧弹力的作用下,再次插进至更换后机械手主体6上相应位置的卡槽705中,从而对更换后的机械手主体6进行夹持,再次转动连接框703上的螺栓708,使得螺栓708转进至卡板704上的第二螺纹槽710中,从而再次对卡板704的滑动进行限制,尽量避免在机械手主体6使用的过程中,由于卡板704的滑动,造成机械手主体6从安装盒701上脱落下来的情况发生。
32.具体的,安装盒701的内壁固定连接有多个定位块711,机械手主体6上开设有多个与各定位块711相配合的定位槽712;利用定位块711,起到了能够对机械手放置在安装盒701中的位置进行快速定位的作用。
33.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1