一种五指仿人灵巧手的制作方法
本技术属于机械手,特别是涉及一种五指仿人灵巧手。
背景技术:
1、为了辅助或替代人手在人类工作环境中进行操作,机械手要实现灵活、精确的运动。仿人灵巧手是一种在手指数量、自由度、外形和功能等方面都接近人手的机械手,模拟人手进行设计和实现,以期望实现类似人手的灵活性。
2、人手中各个关节的运动由肌肉群驱动,可灵活独立的驱动,并且人手具有对掌运动的能力,各手指具有较好的自由度和自适应性能力。对于机械手而言,需要驱动单元提供动力,通常而言,较多的驱动单元能够提供较多的自由度,但驱动单元的体积、数量的增长将引起机械手的体积、重量的增长。机械手的灵活性和体积、重量之间的平衡,也是机械手的重要设计考量因素。
3、机械手的驱动方式主要采用线驱动和连杆驱动,线驱动方式具备重量轻、占据空间小的优点,但线驱动的机械手指负载能力不足,且传动效率和精度较低;连杆驱动方式具备抓取力强、运动精度高的优点,但刚性连杆结构承受碰撞/冲击的能力较差。
技术实现思路
1、本实用新型的目的在于提供一种五指仿人灵巧手,以提供一种灵活性较好,能够兼具捏取、夹取、抓握性能,同时具有较强的抓握力。
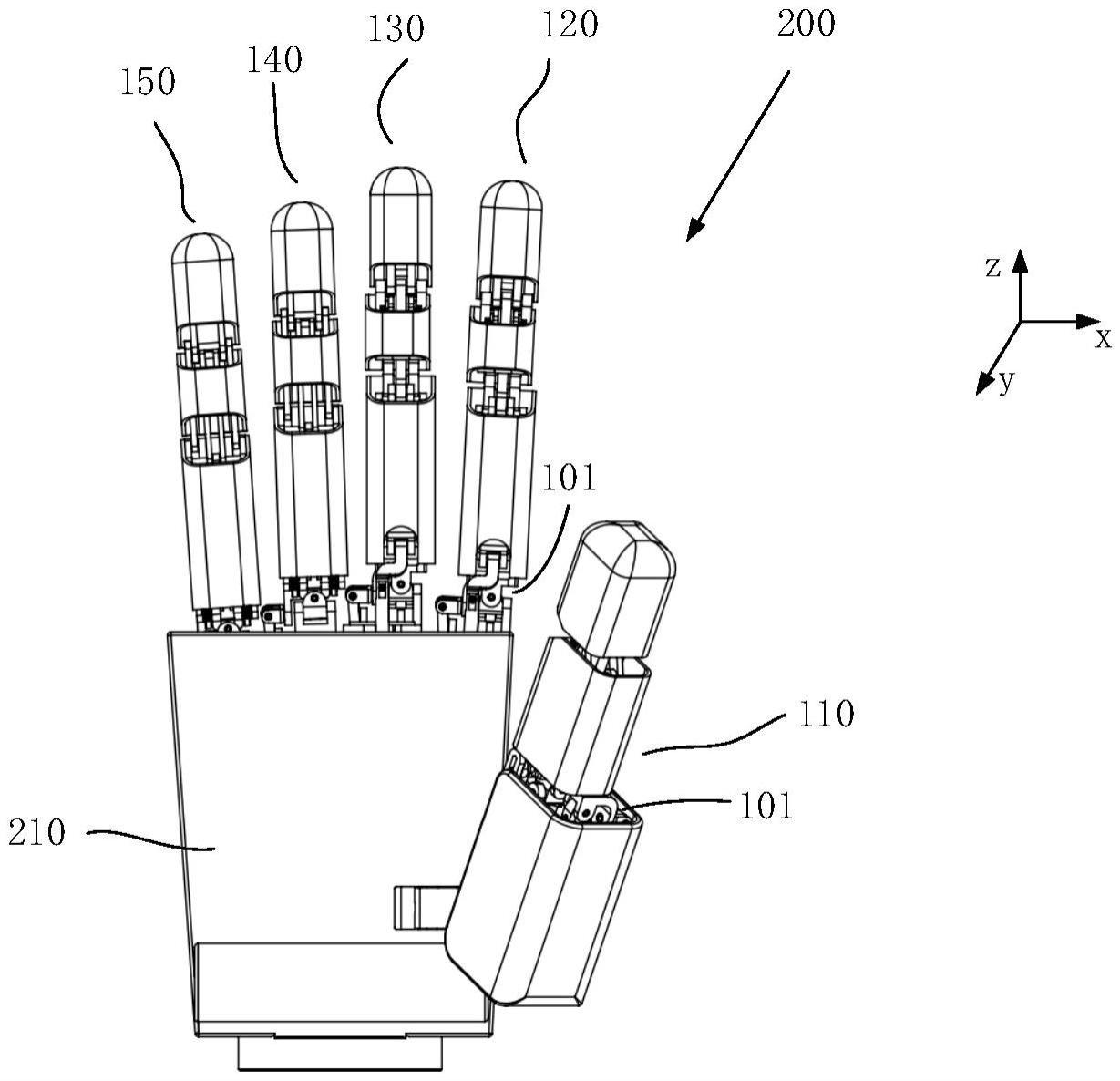
2、为此,本实用新型可采用如下技术方案:一种五指仿人灵巧手,包括手掌和连接于所述手掌且沿z轴延伸的食指、中指、无名指和小指,其特征在于,所述大拇指具有3个致动器和4个关节自由度,基于耦合结构实现抓取;所述食指和中指采用相同结构,各自具有3个致动器和4个关节自由度,食指和中指的中指节能够主动屈伸运动;无名指和小指采用相同的结构,各自具有2个致动器和4个关节自由度,能够自适应被抓物体的形状和尺寸。
3、进一步,每个手指和手掌之间设置有基关节以产生相对于手掌的运动,所述基关节使得各手指执行绕x轴旋转的屈伸运动和绕y轴旋转的侧摆运动,以使各手指的近指节能够主动屈伸运动和侧摆运动;所述大拇指包括设置于大拇指根部的根关节,大拇指通过所述根关节执行绕z轴旋转的对掌运动。
4、进一步,各手指的基关节包括设置于手掌侧的第一基座和设置于手指侧的第二基座,所述第一基座和第二基座之间通过第一转动部连接,所述第一基座设置用于移动第二基座的第一致动器和第二致动器,当第一致动器和第二致动器同步驱动时,第二基座绕第一转动部的x轴旋转执行屈伸运动;当第二致动器单独驱动时,第二基座绕第一转动部的y轴旋转执行侧摆运动。
5、进一步,所述第一致动器用于移动设置于第二基座的第二转动部,第二致动器用于移动设置于第二基座的第三转动部,所述第一致动器和第二致动器同步驱动时,所述第二转动部和第三转动部同步移动使得第二基座执行屈伸运动;所述第二转动部单独驱动时,第三转动部单独移动使得第二基座执行侧摆运动。
6、进一步,各手指包括连接于第二基座的近指节,当近指节未接触物体时跟随第二基座同步运动。
7、进一步,所述大拇指包括2个指节,大拇指近指节和大拇指中指节形成反平行四边形机构,使得大拇指中指节能够耦合屈伸运动。
8、进一步,所述大拇指的根关节包括沿x轴横置于手掌的大拇指第三致动器、以及传递大拇指第三致动器动力的蜗轮蜗杆传动单元,所述大拇指能够绕沿z轴方向设置的大拇指转轴旋转以执行对掌运动。
9、进一步,所述食指和中指各包括3个指节以形成六连杆机构,食指包括食指第三致动器,食指第三致动器用于驱动食指中指节主动屈伸运动,食指远指节能够耦合屈伸运动。
10、进一步,所述无名指和小指各包括3个指节,无名指的3个指节和基关节的第二基座形成为五连杆机构;无名指近指节通过张紧件连接于第二基座,所述张紧件的张紧力使得无名指近指节未接触被抓物体时跟随第二基座运动,当无名指近指节接触被抓物体而克服所述张紧件的张紧力时,无名指能够自适应被抓物体的形状和尺寸。
11、进一步,所述食指、无名指和小指分布于中指的两侧且以预设角度倾斜设置。
12、与现有技术相比,本实用新型具体实施例的有益效果在于:1、提供一种五指仿人灵巧手的设计,该灵巧手具有较多的关节自由度、较少的致动器数量;2、各手指具有主动侧摆功能,大拇指能够对掌运动,满足捏取、夹取、抓握等多种性能要求;3、食指和中指具有较多的灵活性,能够提供较大的抓握力,无名指和小指具有被动自适应抓取的功能,并且能够减少致动器设置。
技术特征:
1.一种五指仿人灵巧手,包括手掌和连接于所述手掌且沿z轴延伸的大拇指、食指、中指、无名指和小指,其特征在于,所述大拇指具有3个致动器和4个关节自由度,基于耦合结构实现抓取;所述食指和中指采用相同结构,各自具有3个致动器和4个关节自由度,食指和中指的中指节能够主动屈伸运动;无名指和小指采用相同的结构,各自具有2个致动器和4个关节自由度,能够自适应被抓物体的形状和尺寸。
2.根据权利要求1所述的五指仿人灵巧手,其特征在于,每个手指和手掌之间设置有基关节以产生相对于手掌的运动,所述基关节使得各手指执行绕x轴旋转的屈伸运动和绕y轴旋转的侧摆运动,以使各手指的近指节能够主动屈伸运动和侧摆运动;所述大拇指包括设置于大拇指根部的根关节,大拇指通过所述根关节执行绕z轴旋转的对掌运动。
3.根据权利要求2所述的五指仿人灵巧手,其特征在于,各手指的基关节包括设置于手掌侧的第一基座和设置于手指侧的第二基座,所述第一基座和第二基座之间通过第一转动部连接,所述第一基座设置用于移动第二基座的第一致动器和第二致动器,当第一致动器和第二致动器同步驱动时,第二基座绕第一转动部的x轴旋转执行屈伸运动;当第二致动器单独驱动时,第二基座绕第一转动部的y轴旋转执行侧摆运动。
4.根据权利要求3所述的五指仿人灵巧手,其特征在于,所述第一致动器用于移动设置于第二基座的第二转动部,第二致动器用于移动设置于第二基座的第三转动部,所述第一致动器和第二致动器同步驱动时,所述第二转动部和第三转动部同步移动使得第二基座执行屈伸运动;所述第二转动部单独驱动时,第三转动部单独移动使得第二基座执行侧摆运动。
5.根据权利要求3所述的五指仿人灵巧手,其特征在于,各手指包括连接于第二基座的近指节,当近指节未接触物体时跟随第二基座同步运动。
6.根据权利要求2所述的五指仿人灵巧手,其特征在于,所述大拇指包括2个指节,大拇指近指节和大拇指中指节形成反平行四边形机构,使得大拇指中指节能够耦合屈伸运动。
7.根据权利要求2所述的五指仿人灵巧手,其特征在于,所述大拇指的根关节包括沿x轴方向横置于手掌的大拇指第三致动器、以及传递大拇指第三致动器动力的蜗轮蜗杆传动单元,所述大拇指能够绕沿z轴方向设置的大拇指转轴旋转以执行对掌运动。
8.根据权利要求2所述的五指仿人灵巧手,其特征在于,所述食指和中指各包括3个指节以形成六连杆机构,食指包括食指第三致动器,食指第三致动器用于驱动食指中指节主动屈伸运动,食指远指节能够耦合屈伸运动。
9.根据权利要求2所述的五指仿人灵巧手,其特征在于,所述无名指和小指各包括3个指节,无名指的3个指节和基关节的第二基座形成为五连杆机构;无名指近指节通过张紧件连接于第二基座,所述张紧件的张紧力使得无名指近指节未接触被抓物体时跟随第二基座运动,当无名指近指节接触被抓物体而克服所述张紧件的张紧力时,无名指能够自适应被抓物体的形状和尺寸。
10.根据权利要求1所述的五指仿人灵巧手,其特征在于,所述食指、无名指和小指分布于中指的两侧且以预设角度倾斜设置。
技术总结
本技术提供一种五指仿人灵巧手,包括手掌和连接于所述手掌且沿Z轴延伸的食指、中指、无名指和小指,其特征在于,所述大拇指具有3个致动器和4个关节自由度,基于耦合结构实现抓取;所述食指和中指采用相同结构,各自具有3个致动器和4个关节自由度,食指和中指的中指节能够主动屈伸运动;无名指和小指采用相同的结构,各自具有2个致动器和4个关节自由度,能够自适应被抓物体的形状和尺寸。本技术的灵巧手拟人化程度高,具有较多的关节自由度,且能够满足捏取、夹取和抓握的性能要求。
技术研发人员:刘静帅,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:20221020
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!