一种加油双臂机器人检测装置的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种加油双臂机器人检测装置。
背景技术:
2.汽车加油机器人,是一种可以24小时连续工作的机器人,是利用智能机器人控制全角度自由机械臂进行实现汽车加油工作,如专利号:cn214924395u专利名称为:一种双臂机器人加油机,给出了一种双臂机器人工作结构,但现有技术中的加油双臂机器人多采用机器人主体检测,利用机器人主体上的检测相机进行寻找汽车油箱的位置,但这样会在工作时。如果出现了遮挡,则无法准确的找到汽车油箱口的具体位置,同时机器人主体距离汽车油箱具有一定的距离,这样会导致检测画面不够清晰。
技术实现要素:
3.实用新型目的:提供一种加油双臂机器人检测装置,解决上述提到的问题。
4.技术方案:一种加油双臂机器人检测装置,包括:所述检测装置安装于所述加油双臂机器人上,所述检测装置由相机、安装架和支撑架组成;
5.所述相机固定安装于所述安装架的一端,所述安装架的另一端固定安装于所述支撑架上。
6.在进一步的实施例中,所述加油双臂机器人由加油机本体、机器人主体和机械臂组组成;
7.所述加油机本体安装于工作区域内,所述机器人主体活动安装于所述加油机本体上,所述机械臂组活动连接于所述机器人主体的两侧。
8.在进一步的实施例中,所述机械臂包括:加油机械臂和开盖机械臂;所述检测装置安装于所述开盖机械臂上。
9.在进一步的实施例中,所述开盖机械臂包括:多轴驱动臂,一端活动连接于所述机器人主体的一侧、另一端设有开盖组件;
10.所述开盖组件包括:吸盘组、旋转组和检测装置,所述检测装置安装于所述吸盘组和旋转组之间。
11.在进一步的实施例中,所述支撑架的上下两端分别与所述吸盘组和旋转组连接。
12.有益效果:本实用新型公开了一种双臂机器人,属于机器人技术领域,具体涉及一种加油双臂机器人检测装置,所述检测装置安装于所述加油双臂机器人上,所述检测装置由相机、安装架和支撑架组成;所述相机固定安装于所述安装架的一端,所述安装架的另一端固定安装于所述支撑架上,本实用新型在加油双臂机器人的开盖机械臂上加入检测装置,由相机进行检测车辆油箱口的位置,从而可以使得机器人可以精准找到油箱口的具体位置,从而提交了加油的准确性。
附图说明
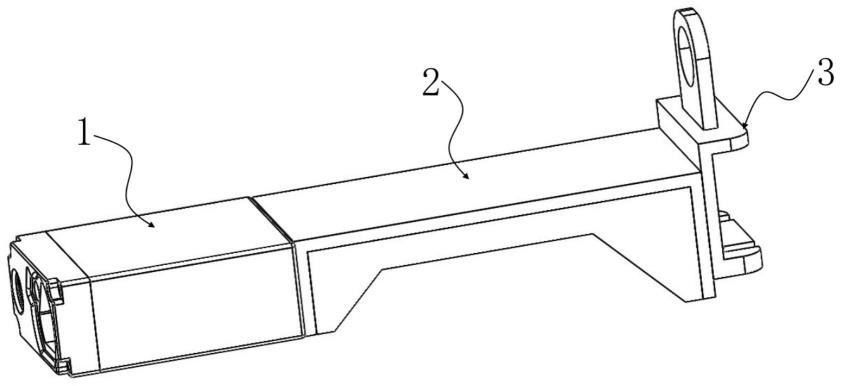
13.图1是本实用新型的检测装置示意图。
14.图2是本实用新型的开盖机械臂示意图。
15.图3是本实用新型的加油双臂机器人示意图。
16.附图标记:相机1、安装架2、支撑架3、加油机本体4、机器人主体5、加油机械臂6、开盖机械臂7、吸盘组8、旋转组9、检测装置10。
具体实施方式
17.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
20.一种加油双臂机器人检测装置,所述检测装置10安装于所述加油双臂机器人上;
21.在一个实施例中,如图1所示,所述检测装置10由相机1、安装架2和支撑架3组成;
22.所述相机1固定安装于所述安装架2的一端,所述安装架2的另一端固定安装于所述支撑架3上。
23.在一个实施例中,如图3所示,所述加油双臂机器人由加油机本体4、机器人主体5和机械臂组组成;
24.所述加油机本体4安装于工作区域内,所述机器人主体5活动安装于所述加油机本体4上,所述机械臂组活动连接于所述机器人主体5的两侧。
25.在一个实施例中,如图3所示,所述机械臂包括:加油机械臂6和开盖机械臂7;所述检测装置10安装于所述开盖机械臂7上。
26.在一个实施例中,如图2所示,所述开盖机械臂7包括:多轴驱动臂,一端活动连接于所述机器人主体5的一侧、另一端设有开盖组件;
27.所述开盖组件包括:吸盘组8、旋转组9和检测装置10,所述检测装置10安装于所述吸盘组8和旋转组9之间。
28.在一个实施例中,如图2所示,所述支撑架3的上下两端分别与所述吸盘组8和旋转组9连接。其中,
29.工作原理:当本实用新型进行工作时,首先机器人主体5进行扫描车辆,进而驱动机械臂组移动至汽车油箱的大致位置,进而检测组件进行精确查找、利用开盖机械臂7上的相机1进行采集此时油箱的具体位置,同时利用多轴驱动臂进行调整位置和角度,当到达符合位置时,进行利用吸盘组8进行开启油箱外盖,并再次利用相机1进行采集油箱内盖位置信息,当确定油箱内盖位置后,进行利用旋转组9进行开启油箱内盖,并利用加油机械臂6进行加油。
30.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
技术特征:
1.一种加油双臂机器人检测装置,其特征在于,所述检测装置安装于所述加油双臂机器人上,所述检测装置由相机、安装架和支撑架组成;所述相机固定安装于所述安装架的一端,所述安装架的另一端固定安装于所述支撑架上。2.根据权利要求1所述一种加油双臂机器人检测装置,其特征在于,所述加油双臂机器人由加油机本体、机器人主体和机械臂组组成;所述加油机本体安装于工作区域内,所述机器人主体活动安装于所述加油机本体上,所述机械臂组活动连接于所述机器人主体的两侧。3.根据权利要求2所述一种加油双臂机器人检测装置,其特征在于,所述机械臂包括:加油机械臂和开盖机械臂;所述检测装置安装于所述开盖机械臂上。4.根据权利要求3所述一种加油双臂机器人检测装置,其特征在于,所述开盖机械臂包括:多轴驱动臂,一端活动连接于所述机器人主体的一侧、另一端设有开盖组件;所述开盖组件包括:吸盘组、旋转组和检测装置,所述检测装置安装于所述吸盘组和旋转组之间。5.根据权利要求4所述一种加油双臂机器人检测装置,其特征在于,所述支撑架的上下两端分别与所述吸盘组和旋转组连接。
技术总结
本实用新型公开了一种双臂机器人,属于机器人技术领域,具体涉及一种加油双臂机器人检测装置,所述检测装置安装于所述加油双臂机器人上,所述检测装置由相机、安装架和支撑架组成;所述相机固定安装于所述安装架的一端,所述安装架的另一端固定安装于所述支撑架上,本实用新型在加油双臂机器人的开盖机械臂上加入检测装置,由相机进行检测车辆油箱口的位置,从而可以使得机器人可以精准找到油箱口的具体位置,从而提交了加油的准确性。从而提交了加油的准确性。从而提交了加油的准确性。
技术研发人员:王晓辉 单洪伟 丁佳
受保护的技术使用者:江苏八麦尔智能科技有限公司
技术研发日:2022.10.31
技术公布日:2023/1/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1