多轴机器人加注机的制作方法
1.本技术涉及汽车自动加注设备技术领域,具体涉及一种多轴机器人加注机。
背景技术:
2.目前,随着经济的高速发展、人民生活水平的不断提高,汽车保有量也在连年增加,与之配套的加油站的建设也逐年增多;同时,出于降低成本的考量,如今的加油站都在大力推广自助加油方式,但提枪自助加油一方面繁琐的操作使其望而却步,另一方面加油枪和油管的缠绕常常使他们无从下手。
3.随着科学技术的进步,尤其是自动化、信息化技术的迅猛发展,以人为主导的传统生产模式正朝向以机器人为主导的智能化生产模式转换。机器人技术的发展为加油站提供了新的服务方式
‑‑
加油机器人:利用传感器定位汽车及其油箱门和油箱口,控制系统指挥机器人自动完成加油。
4.但现有的机器人加油技术中,通常将机械加油臂固定在加油主箱体上,机械臂以主箱体上的固定点为圆心进行伸展加注工作,但受限于驾驶员的操控技术往往不能将汽车加注口停放到指定的加注区,导致用户需反复调整停车位置,严重影响加注效率;同时还可能因停放位置不标准导致识别组件无法识别加油口或出现识别误差导致油品加注失败的问题。
5.公开于该背景技术部分的信息仅用于加深对本公开的背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现要素:
6.鉴于以上技术问题中的至少一项,本公开提供了一种多轴机器人加注机,通过在机械臂顶部加装位移组件,使得机械臂可随意调整作业位置,增大作业半径,满足不同停车区域的油品加注工作。
7.根据本公开的一个方面,提供一种多轴机器人加注机,包括六轴机械臂,安装在该六轴机械臂底部的加注组件和视觉识别组件及位移组件,所述位移组件包括驱动源、与该驱动源传动连接的传动组件、与所述六轴机械臂顶部配合连接的滑台及所述滑台配合连接的导轨;所述驱动源通过所述传动组件带动所述六轴机械臂沿所述导轨移动,以调节六轴机械臂底部加油组件及视觉识别组件的作业范围。
8.在本公开的一些实施例中,所述导轨包括沿纵向布设的第一导轨及沿横向布设的第二导轨,所述驱动源包括与所述第一导轨传动配合的纵移电机及与所述第二导轨传动配合的横移电机,所述纵移电机和横移电机分别带动所述六轴机械臂沿第一导轨和第二导轨进行纵向和横向移动。
9.在本公开的一些实施例中,所述安装座包括与所述第一导轨配合的纵向滑槽、与所述第二导轨配合的横向滑槽及与所述六轴机械臂连接的安装孔。
10.在本公开的一些实施例中, 所述传动组件包括与所述横移电机配合连接的丝杆
及与所述丝杆配合连接的安装座,所述安装座设置在所述第一导轨上,转动所述丝杆以使所述六轴机械臂沿所述第二导轨横向移动。
11.本技术实施例中提供的一个或多个技术方案,至少具有如下任一技术效果或优点:
12.采用了在六轴机械臂顶部增设横向导轨和纵向导轨,并通过滑台将六轴机械臂分别与横向导轨和纵向导轨滑动配合,启动横移电机和纵移电机使得六轴机械臂分别沿纵向、横向导轨进行移动,从而提高了加油机器人的作业半径,有效解决了机械臂工作半径有限、视觉识别系统视野受限,导致在固定的区域识别时,识别区域较小的技术问题,同时还解决了加注时停车不规范而导致的加注失败的缺陷,提升了自动加油的效率和成功率。
附图说明
13.图1为本技术一实施例中位移组件的结构示意图之一。
14.图2为本技术一实施例中位移组件的结构示意图之二。
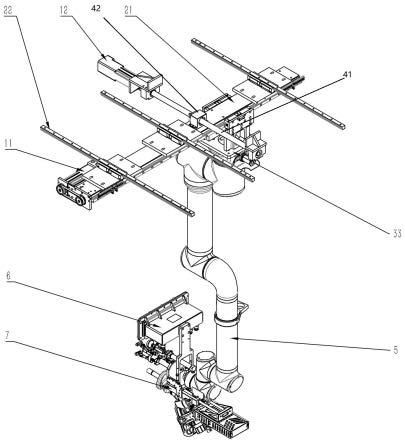
15.图3为本技术一实施例中多轴机器人加注机的结构示意图。
16.以上各图中,1、驱动源;11、纵移电机;12、横移电机;2、导轨;21、第一导轨;22、第二导轨;3、滑台;31、第一滑槽;32、第二滑槽;33、安装孔;4、传动组件;41、丝杆;42、安装座;5、六轴机械臂;6、视觉识别组件;7、加注组件。
具体实施方式
17.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“竖直”、“水平”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。本技术所涉及“第一”、“第二”等是用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所涉及“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
18.实施例一
19.本例公开一种多轴机器人加注机,参见图1至图3,包括六轴机械臂5,安装在该六轴机械臂5底部的加注组件7及视觉识别组件6、安装在六轴机械臂5顶部的位移组件。
20.所述位移组件包括驱动源1、与所述驱动源1传动配合的传动组件、导轨2及用于将六轴机械臂5安装在导轨上的滑台3;所述导轨2包括纵向布设的第一导轨21及与所述第一导轨21相垂直横向布设的第二导轨22,所述驱动源1包括用于为六轴机械臂5沿第一导轨21纵向移动提供动力来源的纵移电机11及用于为六轴机械臂5沿第二导轨22横向移动的横移电机12,所述纵移电机11和横移电机12均采用具有正反转功能的电机,以便往复调整六轴机械臂5的作业位置;所述传动组件4包括与所述纵移电机11配合的第一传动组件及与所述横移电机12配合的第二传动组件;所述第一传动组件包括与所述纵移电机11输出端传动配合连的同步轮、安装在第一导轨底部的丝杆及与所述纵移电机输出端同步配合的传送带,所述纵移电机11带动其输出端的同步轮转动,进一步使得第一导轨底部的丝杆转动,所述滑台3上设有与该丝杆配合的丝杆螺母,通过纵移电机11的转动带动第一导轨21底部的丝杆转动,进一步使得滑台3沿第一导轨21往复运动;所述第二传动组件包括与所述横移电机
12的输出端传动配合连接的丝杆及与所述丝杆41旋拧配合连接的安装座42,所述安装座42分别固定在丝杆41的两端及中部位置,两端的安装座42与加油机的框架固定连接,中部的安装座42固定安装在第一导轨21上,启动所述横移电机12带动丝杆41转动,使得滑台3上的六轴机械臂5沿第二导轨22横向移动,调节六轴机械臂5的作业位置,满足不同区域内的油品加注工作。
21.所述滑台3顶部开设有与所述第二导轨22滑动配合连接的第二凹槽,所述滑台3的底部开设有与所述第一导轨21滑动配合连接的第一凹槽,且所述滑台3上还设有与所述六轴机械臂5顶部连接的安装孔,通过螺栓螺母将六轴机械臂5的顶端固定在所述滑台3上,并通过横移电机12和纵移电机11带动六轴机械臂5在第一导轨21和第二导轨22上移动。
22.上述多轴机器人加注机的操作使用原理如下:
23.(1)带汽车进入加注区并熄火等待加注时,所述视觉识别组件对汽车加注口进行粗定位;
24.(2)根据视觉识别的定位,所述横移电机和纵移电机分别启动带动六轴机械臂沿第一导轨和第二导轨进行移动,并移动至靠近加油口最佳位置;
25.(3)所述视觉识别组件进一步对加油口进行精确定位,六轴机械臂底部的加注组件根据精确定位开始进行加注工作。
26.尽管已描述了本技术的一些优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
27.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本技术之发明精神和范围。这样,倘若对本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1