一种焊接机器人行走地轨用的行走限位机构的制作方法
本技术主要涉及焊接机器人的,具体涉及一种焊接机器人行走地轨用的行走限位机构。
背景技术:
1、焊接机器人是一种能够自动对工件进行焊接的焊接设备,利用计算机来对其进行控制,实现自动化的焊接作业,焊接机器人地轨需要行程限位,防止机器人脱离地轨。
2、根据申请号为cn201921523841.5的专利文献所提供的一种用于机器人地轨的行程限位机构可知,该行程限位机构包括地轨、限位机构和行程开关;所述限位机构安装在地轨两侧,所述行程开关安装在地轨的侧面。该行程限位机构能够解决工业机器人在接收到停止信号后,能够抵消牵引力或者惯性,将地轨上的机器人停在行程限位机构设置的位置,还能够调整行程开关位置。
3、上述地轨的行程限位机构能够抵消牵引力或者惯性,将地轨上的机器人停在行程限位机构设置的位置,但传统的行程限位机构往往通过弧形面为机器人提供换成,长期的碰撞容易影响行程限位机构的使用寿命。
技术实现思路
1、本实用新型主要提供了一种焊接机器人行走地轨用的行走限位机构用以解决上述背景技术中提出的技术问题。
2、本实用新型解决上述技术问题采用的技术方案为:
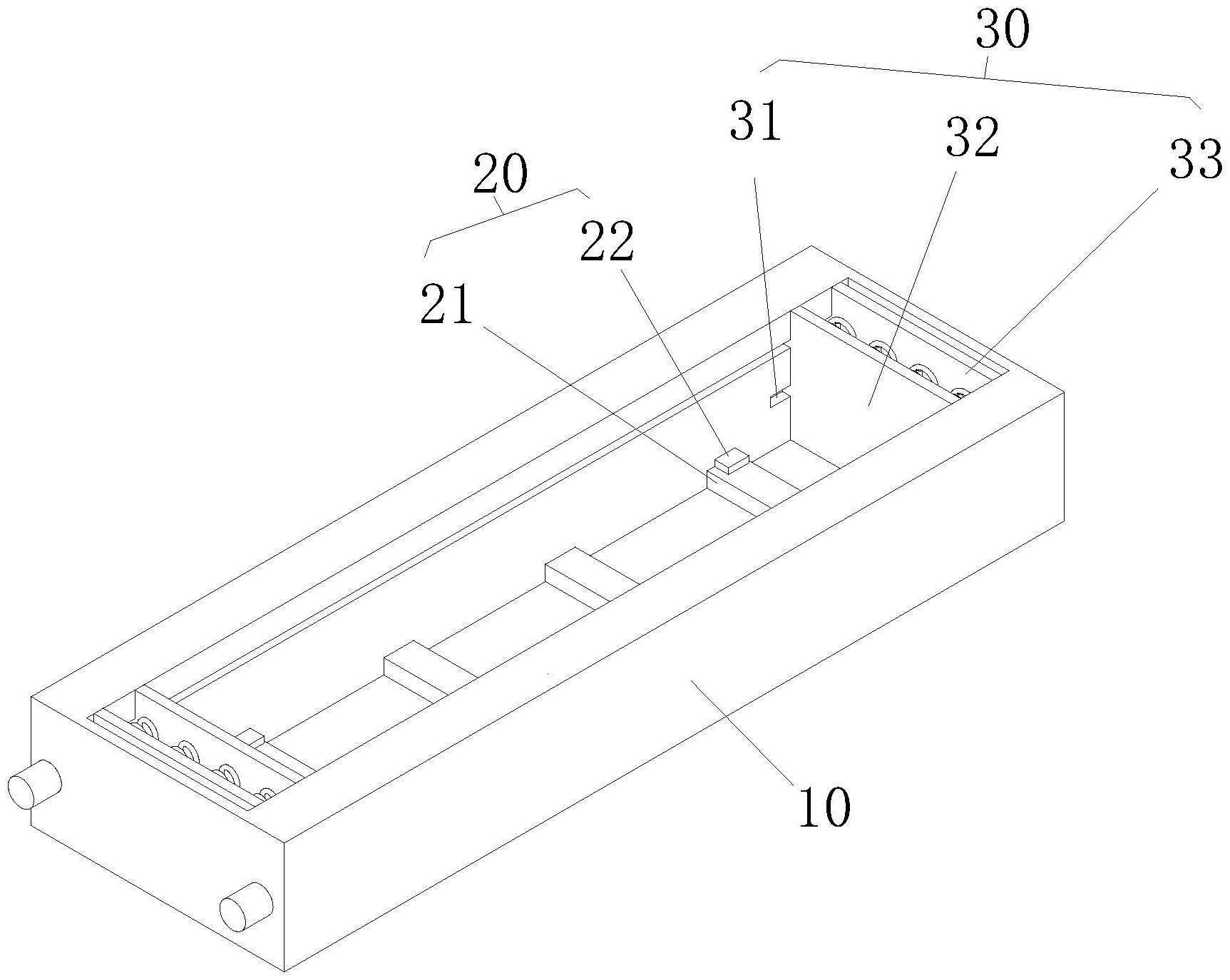
3、一种焊接机器人行走地轨用的行走限位机构,包括地轨,所述地轨的内部两端设有限制组件,所述地轨的内部底端设有监测组件,所述监测组件设于两个所述限制组件之间;
4、所述监测组件包括设于两个所述限制组件之间、且安装于所述地轨内部底端的多个横梁,以及安装于靠近所述限制组件的横梁上表面的光电传感器;
5、所述限制组件包括设于所述地轨内壁、且对称设置的滑槽,与所述滑槽滑动连接的受压板,以及与所述滑槽相连接的缓冲器,所述受压板的壳体一端嵌入有第一压力传感器。
6、进一步的,所述缓冲器包括穿设于所述滑槽槽体内部的丝杆,以及与所述滑槽滑动连接、且通过丝母与所述丝杆外表面相连接的挤压板,所述挤压板与受压板之间设有多个第一弹簧。
7、进一步的,所述受压板远离所述第一压力传感器的壳体一端连接有第二压力传感器。
8、进一步的,所述挤压板和受压板的外表面均设有延伸至所述滑槽内部的滑块,所述滑块通过丝母与所述丝杆的外表面相连接。
9、进一步的,所述滑块延伸至滑槽内部的一端设有通孔,所述通孔的内部通过转轴转动连接有滑轮。
10、进一步的,所述丝杆的外部套设有第二弹簧,所述第二弹簧设于所述受压板与挤压板之间。
11、进一步的,所述受压板远离挤压板的一侧表面设有橡胶垫。
12、与现有技术相比,本实用新型的有益效果为:
13、本实用新型能够监测机器人停机后的移动,并可以调整对机器人的缓冲效果,从而提高限位机构的使用效果,具体为:通过第一压力传感器监测机器人对受压板的挤压力度,以使与第一压力传感器相连接的控制器能够监测到机器人停止后的移动,电机带动与其输出轴相连接的丝杆进行旋转时,挤压板将丝杆的回转运动转变为自身的直线运动,从而带动挤压板进行平移,以改变挤压板与受压板之间的距离,也即改变第一弹簧的缓冲效果。
14、以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
技术特征:
1.一种焊接机器人行走地轨用的行走限位机构,包括地轨(10),其特征在于,所述地轨(10)的内部两端设有限制组件(30),所述地轨(10)的内部底端设有监测组件(20),所述监测组件(20)设于两个所述限制组件(30)之间;
2.根据权利要求1所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述缓冲器(33)包括穿设于所述滑槽(31)槽体内部的丝杆(331),以及与所述滑槽(31)滑动连接、且通过丝母与所述丝杆(331)外表面相连接的挤压板(332),所述挤压板(332)与受压板(32)之间设有多个第一弹簧(333)。
3.根据权利要求2所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述受压板(32)远离所述第一压力传感器(34)的壳体一端连接有第二压力传感器(35)。
4.根据权利要求2所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述挤压板(332)和受压板(32)的外表面均设有延伸至所述滑槽(31)内部的滑块(3321),所述滑块(3321)通过丝母与所述丝杆(331)的外表面相连接。
5.根据权利要求4所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述滑块(3321)延伸至滑槽(31)内部的一端设有通孔(3322),所述通孔(3322)的内部通过转轴转动连接有滑轮(3323)。
6.根据权利要求5所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述丝杆(331)的外部套设有第二弹簧(334),所述第二弹簧(334)设于所述受压板(32)与挤压板(332)之间。
7.根据权利要求2所述的一种焊接机器人行走地轨用的行走限位机构,其特征在于,所述受压板(32)远离挤压板(332)的一侧表面设有橡胶垫(321)。
技术总结
本技术提供了一种焊接机器人行走地轨用的行走限位机构,包括地轨,所述地轨的内部两端设有限制组件,所述地轨的内部底端设有监测组件,所述监测组件设于两个所述限制组件之间;所述监测组件包括设于两个所述限制组件之间、且安装于所述地轨内部底端的多个横梁,以及安装于靠近所述限制组件的横梁上表面的光电传感器;所述限制组件包括设于所述地轨内壁、且对称设置的滑槽,与所述滑槽滑动连接的受压板,以及与所述滑槽相连接的缓冲器,所述受压板的壳体一端嵌入有第一压力传感器。本技术能够监测机器人停机后的移动,并可以调整对机器人的缓冲效果,从而提高限位机构的使用效果。
技术研发人员:桂劲松,雷忠能,计文超
受保护的技术使用者:芜湖锐龙机器人科技有限公司
技术研发日:20221114
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!