拾料机器人的制作方法
1.本实用新型涉及机械臂领域,尤其涉及拾料机器人。
背景技术:
2.在对工件加工和装配过程中,需要使工件进行拾取和转运,如图1所示,目前,采用机器人进行拾取和转运,为工件转运的一种输送方式,但,由于机器人体积大,占据设备空间多,而且在使用时,还需专业人员进行编程调试,对于该情况,有通过增加设备占地面积和进驻专业人员,但实际情况是,增加设备占地面积,且编程和计算机模拟过程的时间耗费长,导致生产成本增加,且使工件拾取和转运较为不便,因此,提出一种结构简单、体型较小且无需进行编程的机器人。
技术实现要素:
3.本实用新型的目的是解决现有技术存在的以下问题:由于机器人体积大,占据设备空间多,而且在使用时,还需专业人员进行编程调试,对于该情况,有通过增加设备占地面积和进驻专业人员,但实际情况是,增加设备占地面积,且编程和计算机模拟过程的时间耗费长,导致生产成本增加,且使工件拾取和转运较为不便。
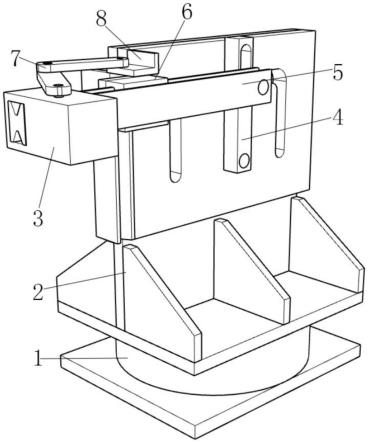
4.为解决现有技术存在的问题,本实用新型提供了拾料机器人,包括旋转座,所述旋转座的顶端设有支撑架,所述支撑架的侧面顶端设有贯穿所述支撑架的电机,所述电机的一端且位于支撑架的另一侧设有连接块,所述连接块的顶端设有贯穿所述连接块且与所述支撑架连接的连接杆,所述连接杆的一端设有安装块。
5.优选的,所述支撑架的一端设有滑轨,所述滑轨的外侧包裹有第二滑块,所述第二滑块的侧面设有第一滑块,所述第一滑块与所述连接杆连接,该结构用于使连接杆的移动呈横平竖直状。
6.优选的,所述支撑架的另一侧设有u形槽,所述支撑架的u形槽顶端呈水平状,所述连接杆的一端插接在支撑架的u形槽内侧,通过支撑架的u形槽顶端呈水平,使连接杆可水平移动。
7.优选的,所述连接块的顶端设有通孔,其通孔形状呈腰形,所述连接杆的一端插接在连接块的通孔内侧,所述连接块的通孔尺寸与连接杆的一端适配,该结构用于使连接杆在支撑架的u形槽内侧水平移动距离较长。
8.优选的,所述第二滑块的顶端且位于第一滑块的上方设有连接座,所述连接座的顶端套设有连杆,所述连杆的一端套设在安装块的上方,该结构通过连杆与第一滑块和第二滑块连接,使连杆具有对安装块的支撑力。
9.优选的,所述安装块的一端设置有连接孔,所述安装块的底端设有安装孔,所述连接杆的另一端插接在安装块的连接孔内侧,该结构用于使连接杆固定在安装块的内侧,使连接块带动连接杆移动时安装块可进行移动,同时使安装块的安装孔安装夹具或吸盘。
10.优选的,所述支撑架的两侧底端均设有加强筋,该结构用于提升支撑架的支撑强
度。
11.与现有技术相比,本实用新型的有益效果是:
12.本实用新型通过在支撑架的侧面设置顶端具有直段的u形槽,使连接块带动连接杆在支撑架的u形槽内侧移动的同时,通过第一滑块、滑轨、第二滑块的配合,使安装块的位置坐水平和垂直运动,使安装块移动至物料上方,使安装块下方安装的拾料工具进行拾料,并通过旋转座使安装块的位置调节放料,使拾料机器人的结构较为简单,且避免识拾料机器人在使用时需要进行编程工作。
附图说明
13.图1为现有机器人结构示意图;
14.图2为本实用新型的整体结构示意图;
15.图3为本实用新型的整体结构侧视示意图;
16.图4为本实用新型的连接杆处放大示意图;
17.图5为本实用新型的支撑架处放大示意图;
18.图6为本实用新型的整体结构仰视示意图;
19.附图标记:1、旋转座;2、支撑架;3、安装块;4、连接块;5、连接杆;6、第一滑块;7、连杆;8、连接座;9、电机;10、滑轨;11、第二滑块。
具体实施方式
20.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例和附图,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。
21.下面结合附图描述本实用新型的具体实施例。
22.实施例1
23.如图2-6所示,拾料机器人,由以下部件装配而成:
[0024][0025]
装配说明:首先将支撑架2安装到旋转座1上,再将电机9的输出轴穿过支撑架2安装到支撑架2的侧面,再将连接块4安装到电机9的输出轴上,再将滑轨10安装到支撑架2的侧面,第一滑块6安装到第二滑块11的侧面,再将连接杆5滑动连接到第一滑块6的内侧,第二滑块11滑动连接到滑轨10的外侧,再使连接杆5的一端由连接杆插接在连接块4的一端并使连接杆5的插接杆位于支撑架2的u形槽内侧,再将连接杆5的另一端插接在安装块3的内侧,同时将87位于滑轨10的上方安装到支撑架2的侧面,字啊将连杆7的两端套接在连接座8和安装块3的顶端。
[0026]
工作原理说明:使用时,通过电机9带动连接块4正转,当连接块4带动连接杆5的一端在支撑架2侧面的u形槽内侧顶端移动时,连接杆5的中部通过在第一滑块6的内侧滑动,并做直线运动,使第一滑块6带动安装块3移动至物料上方,当连接块4带动连接杆5的一端位于支撑架2侧面的u形槽侧面时,连接杆5的一端根据支撑架2的u形槽下移,使连接杆5通过第一滑块6带动第二滑块11在滑轨10上滑动,并做直线运动,使连接杆5带动安装块3下方安装的夹具或吸盘进行拾料工作,同时安装块3带动连杆7活动,使连杆7与连接座8对安装块3进行支撑,再通过旋转座1转动,使安装块3的位置调节,使进行搬运,并通过电机9反转,旋转座1回转,使连接杆5收缩,使安装块3的位置恢复原位,并进行持续工作。
[0027]
以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.拾料机器人,包括旋转座(1),其特征在于:所述旋转座(1)的顶端设有支撑架(2),所述支撑架(2)的侧面顶端设有贯穿所述支撑架(2)的电机(9),所述电机(9)的一端且位于支撑架(2)的另一侧设有连接块(4),所述连接块(4)的顶端设有贯穿所述连接块(4)且与所述支撑架(2)连接的连接杆(5),所述连接杆(5)的一端设有安装块(3)。2.根据权利要求1所述的拾料机器人,其特征在于:所述支撑架(2)的一端设有滑轨(10),所述滑轨(10)的外侧包裹有第二滑块(11),所述第二滑块(11)的侧面设有第一滑块(6),所述第一滑块(6)与所述连接杆(5)连接。3.根据权利要求1所述的拾料机器人,其特征在于:所述支撑架(2)的另一侧设有u形槽,所述支撑架(2)的u形槽顶端呈水平状,所述连接杆(5)的一端插接在支撑架(2)的u形槽内侧。4.根据权利要求1所述的拾料机器人,其特征在于:所述连接块(4)的顶端设有通孔,其通孔形状呈腰形,所述连接杆(5)的一端插接在连接块(4)的通孔内侧,所述连接块(4)的通孔尺寸与连接杆(5)的一端适配。5.根据权利要求2所述的拾料机器人,其特征在于:所述第二滑块(11)的顶端且位于第一滑块(6)的上方设有连接座(8),所述连接座(8)的顶端套设有连杆(7),所述连杆(7)的一端套设在安装块(3)的上方。6.根据权利要求1所述的拾料机器人,其特征在于:所述安装块(3)的一端设置有连接孔,所述安装块(3)的底端设有安装孔,所述连接杆(5)的另一端插接在安装块(3)的连接孔内侧。7.根据权利要求1所述的拾料机器人,其特征在于:所述支撑架(2)的两侧底端均设有加强筋。
技术总结
本实用新型提供拾料机器人,涉及机械臂领域,包括旋转座,所述旋转座的顶端设有支撑架,所述支撑架的侧面顶端设有贯穿所述支撑架的电机,所述电机的一端且位于支撑架的另一侧设有连接块,所述连接块的顶端设有贯穿所述连接块且与所述支撑架连接的连接杆,通过在支撑架的侧面设置顶端具有直段的U形槽,使连接块带动连接杆在支撑架的U形槽内侧移动的同时,通过第一滑块、滑轨、第二滑块的配合,使安装块的位置坐水平和垂直运动,使安装块移动至物料上方,使安装块下方安装的拾料工具进行拾料,并通过旋转座使安装块的位置调节放料,使拾料机器人的结构较为简单,且避免识拾料机器人在使用时需要进行编程工作。用时需要进行编程工作。用时需要进行编程工作。
技术研发人员:倪超 肖宇 慧义冉 赵欢
受保护的技术使用者:江苏博裕自动化设备有限公司
技术研发日:2022.11.28
技术公布日:2023/3/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1