机械制造用机械臂
本技术涉及机械制造,尤其涉及一种机械制造用机械臂。
背景技术:
1、在机械制造领域会广泛运用到不同功能的自动化机械装置,机械臂即是其中一种较为常见的高精度装置,机械臂的主要功能是拿取物体,然后将其移动到指定位置,因此夹持机构和移动机构是机械臂的两大核心模块。
2、现有的机械臂在夹持物体时,不便于调节夹爪之间的距离,只适用于同种规格物体的转移,若物体的形状改变时,还需要对夹爪进行调整、更换,使用不够方便,降低了机械制造的效率,为此,我们提出一种机械制造用机械臂。
技术实现思路
1、本实用新型的目的是为了解决现有技术中机械臂在夹持物体时不便于调节夹爪的间距,当物体的形状变化较大时,还需要更换夹爪进行匹配,降低了效率的问题,而提出的一种机械制造用机械臂。
2、为了实现上述目的,本实用新型采用了如下技术方案:
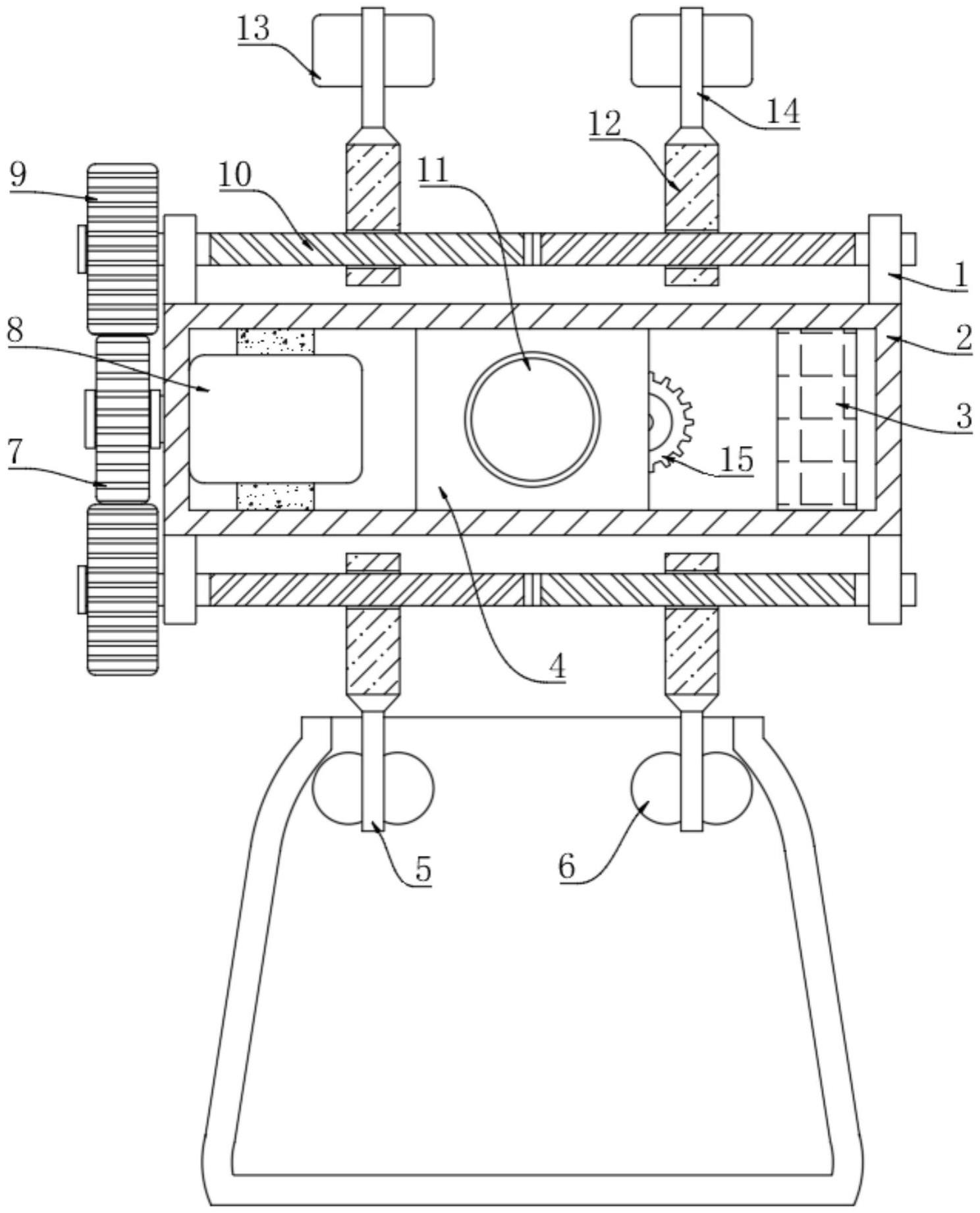
3、一种机械制造用机械臂,包括安装框,所述安装框的中部设置有固定板,所述固定板连接有旋转驱动机构,所述安装框的外侧壁上对称设置有两个夹持机构,每个所述夹持机构均包括两个侧板,位置相对应的两个所述侧板之间均转动安装有双向滚珠丝杠,每个所述双向滚珠丝杠均连接有两个装配座,所述安装框上设置有传动机构。
4、进一步,其中两个所述装配座固定连接有第一夹持臂,每个所述第一夹持臂上均对称设置有两个第一夹持件,另外两个所述装配座固定连接有第二夹持臂,每个所述第二夹持臂上均对称设置有两个第二夹持件。
5、进一步,每个所述第一夹持件均为半球形弹性垫片,每个所述第二夹持件均为条形弹性垫片。
6、进一步,所述传动机构包括第一电机,所述第一电机的输出轴转动贯穿安装框并同轴连接有第一齿轮,所述第一齿轮啮合传动有两个减速齿轮,两个所述双向滚珠丝杠的一端均通过轴杆与位置相对应的减速齿轮固定连接。
7、进一步,所述安装框内固定有配重块,且固定板位于配重块与第一电机之间。
8、进一步,所述旋转驱动机构包括第二电机,所述第二电机的输出轴同轴连接有第二齿轮,所述第二齿轮啮合传动有外齿圈,所述外齿圈内过盈配合有驱动轴,所述驱动轴的一端与固定板固定连接。
9、本实用新型具有以下优点:
10、1、通过设置第二电机、第二齿轮、外齿圈、驱动轴以及固定板,可以实现安装框的转动,从而实现不同形式夹持机构的切换,适用于不同形状物体的夹持,适用范围广;
11、2、第一夹持件为半球形弹性垫片,可以对形状不规则的物体进行固定,第二夹持件为条形弹性垫片,可以对形状规则的物体进行固定,并且与物体的接触面积稍大,物体单位面积承受的压强较小,上述两种夹持机构均能对物体的内侧或外侧进行固定,使用灵活;
12、3、通过设置第一电机、第一齿轮、减速齿轮、双向滚珠丝杠以及装配座,可以根据需求对第一夹持臂或第二夹持臂之间的距离进行调节,增加夹持范围。
技术特征:
1.一种机械制造用机械臂,包括安装框(2),其特征在于,所述安装框(2)的中部设置有固定板(4),所述固定板(4)连接有旋转驱动机构,所述安装框(2)的外侧壁上对称设置有两个夹持机构,每个所述夹持机构均包括两个侧板(1),位置相对应的两个所述侧板(1)之间均转动安装有双向滚珠丝杠(10),每个所述双向滚珠丝杠(10)均连接有两个装配座(12),所述安装框(2)上设置有传动机构。
2.根据权利要求1所述的一种机械制造用机械臂,其特征在于,其中两个所述装配座(12)固定连接有第一夹持臂(5),每个所述第一夹持臂(5)上均对称设置有两个第一夹持件(6),另外两个所述装配座(12)固定连接有第二夹持臂(14),每个所述第二夹持臂(14)上均对称设置有两个第二夹持件(13)。
3.根据权利要求2所述的一种机械制造用机械臂,其特征在于,每个所述第一夹持件(6)均为半球形弹性垫片,每个所述第二夹持件(13)均为条形弹性垫片。
4.根据权利要求1所述的一种机械制造用机械臂,其特征在于,所述传动机构包括第一电机(8),所述第一电机(8)的输出轴转动贯穿安装框(2)并同轴连接有第一齿轮(7),所述第一齿轮(7)啮合传动有两个减速齿轮(9),两个所述双向滚珠丝杠(10)的一端均通过轴杆与位置相对应的减速齿轮(9)固定连接。
5.根据权利要求4所述的一种机械制造用机械臂,其特征在于,所述安装框(2)内固定有配重块(3),且固定板(4)位于配重块(3)与第一电机(8)之间。
6.根据权利要求1所述的一种机械制造用机械臂,其特征在于,所述旋转驱动机构包括第二电机(18),所述第二电机(18)的输出轴同轴连接有第二齿轮(15),所述第二齿轮(15)啮合传动有外齿圈(17),所述外齿圈(17)内过盈配合有驱动轴(11),所述驱动轴(11)的一端与固定板(4)固定连接。
技术总结
本技术公开了一种机械制造用机械臂,包括安装框,所述安装框的中部设置有固定板,所述固定板连接有旋转驱动机构,所述安装框的外侧壁上对称设置有两个夹持机构,每个所述夹持机构均包括两个侧板,位置相对应的两个所述侧板之间均转动安装有双向滚珠丝杠,每个所述双向滚珠丝杠均连接有两个装配座,所述安装框上设置有传动机构。优点在于:通过设置第二电机、第二齿轮、外齿圈、驱动轴以及固定板,可以实现安装框的转动,从而实现不同形式夹持机构的切换,适用于不同形状物体的夹持,适用范围广,第一夹持件为半球形弹性垫片,可以对形状不规则的物体进行固定,第二夹持件为条形弹性垫片,可以对形状规则的物体进行固定。
技术研发人员:赵昱皓
受保护的技术使用者:西北工业大学
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!