机器人关节及并联机器人的制作方法
1.本技术涉及工业机器人领域,尤其是涉及机器人关节及并联机器人。
背景技术:
2.并联机器人是小型高速并联工业机器人,广泛应用于抓取分拣、搬运码跺、装配涂装等工艺场合。
3.目前,市场上常见的并联机器人一般均包括动平台、静平台、多组连杆链路和多组电机及减速器(连杆链路以及电机的组数常见为三组,也可以为四组、五组以及五组以上),执行机构放置于动平台末端,动平台通过多组连杆链路与静平台连结,多组电机及减速器安装于静平台上;连杆链路一般包括主动臂和从动臂,主动臂一端连接于电机的输出端、另一端通过运动关节与从动臂相连接,从动臂远离主动臂的一端连接于动平台上;具体的,主动臂与从动臂之间的连接多采用球铰接的方式,以使运动关节更为灵活。
4.而相关技术中主动臂和从动臂之间的球铰接,球头及一体同轴固定连接于球头上的转向轴一般由球座侧边开有的进口进入球座,而实现球座与球头的连接;但基于上述连接方式所设计的运动关节大多不具备防脱结构,在并联机器人使用的过程中,球头及转向轴有几率从进口松脱,影响并联机器人的正常运行。
技术实现要素:
5.为了增强球头与球座连接的稳定性、保障并联机器人的正常运行,本技术提供机器人关节及并联机器人。
6.本技术在于提供一种机器人关节,采用如下的技术方案:
7.一种机器人关节,设于主动臂与从动臂之间,包括固定安装于主动臂远离静平台的一端的转向轴、同轴固定连接于转向轴上的球头以及固定安装于从动臂远离动平台的一端的球座,所述球座上开设有用于供球头球铰接的第一球槽、用于供球头插入的第二球槽以及连通第一球槽和第二球槽的滑槽;所述第一球槽、第二球槽和滑槽开口朝向一致,且所述滑槽的延伸方向与从动臂的长度方向相一致,所述第二球槽的开口面积以及球头的最大截面面积均大于第一球槽的开口面积,所述滑槽开口的最大宽度小于球头的直径;所述球座上还可拆卸固定安装有用于对滑槽进行覆盖的固定套。
8.通过采用上述技术方案,第一球槽、第二球槽、滑槽以及固定套共同构成防脱结构,在连接/安装主动臂和从动臂的过程中,将球头置入第二球槽内,并使球头和转向轴沿滑槽滑入第一球槽内,再采用固定套对滑槽进行覆盖,能够使得球头无法从第一球槽内滑脱,从而起到防脱的技术效果,有效增强了球头和球座之间连接的紧密性,使得球头和球座连接更为稳定;同时,固定套在从动臂端部对球座进行了一定的加固,增强了球座的强度,使得从动臂能够更为有效地承受分拣重力,进一步增强机器人关节于主动臂和从动臂之间的连接效果,使得主动臂和从动臂之间的连接更为稳定。
9.可选的,所述固定套包括相互对接且规格一致的左半套和右半套,所述左半套和
右半套之间通过螺栓锁止,且所述左半套和右半套均与球座间隙配合。
10.通过采用上述技术方案,采用螺栓锁止左半套和右半套,能够使得左半套和右半套对滑槽进行稳定覆盖,同时拆装较为简易,操作人员能够较为方便地实现球头与球座的连接。
11.可选的,所述滑槽内还可拆卸连接有用于防止球头从第一球槽滑入滑槽的防脱组件。
12.通过采用上述技术方案,采用防脱组件防止球头从第一球槽滑入滑槽,能够在球头安装进入第一球槽后,配合固定套对球头和球座的连接进行进一步加强,从而使得球头与球座的连接稳定性更佳。
13.可选的,所述防脱组件包括防脱弧板以及用于将防脱弧板弹性顶紧于滑槽与第一球槽之间的弹性部件,所述防脱弧板沿滑槽的延伸方向滑动连接于滑槽内。
14.通过采用上述技术方案,采用弹性部件将弹性弧板顶紧于滑槽与第一球槽之间,能够在不影响球头正常运作的同时,对第一球槽与滑槽之间的连通通道进行阻挡,有效避免球头从第一球槽内滑出。
15.可选的,所述弹性部件包括一端固定连接于防脱弧板上的弹性件、抵接于弹性件远离防脱弧板的一端的驱动滑块以及用于防止驱动滑块朝向第二球槽滑动的顶紧件,所述驱动滑块滑动连接于滑槽内,且所述驱动滑块远离弹性件的一侧与顶紧件相抵接,所述顶紧件可拆卸固定安装于球座上。
16.通过采用上述技术方案,采用顶紧件将驱动滑块顶紧于滑槽内,能够在防脱弧板、弹性件以及驱动滑块安装进入滑槽后、于滑槽的延伸方向上对防脱弧板、弹性件以及驱动滑块整体进行阻挡,使得防脱弧板、弹性件以及驱动滑块整体在球头安装进入第一球槽内后有效封闭第一球槽与滑槽之间的通道,最大限度防止球头沿滑槽从球座中脱落。
17.可选的,所述顶紧件为螺纹件,所述驱动滑块远离弹性件的一侧与顶紧件楔形配合。
18.通过采用上述技术方案,采用螺纹件对驱动滑块进行锁止,能够较为稳定地将驱动滑块、弹性件以及防脱弧板顶紧于滑槽内;同时,随着顶紧件不断深入滑槽,驱动滑块能够朝向防脱弧板靠近,增大对拉弹簧的形变量,使得对拉弹簧更为有效地顶紧防脱弧板,从而使得防脱弧板能够在不影响球头正常运作的情况下仍能够对球头进行有效承托、顶紧。
19.可选的,所述球座于滑槽内还开设有直线的限位槽,所述限位槽的延伸方向与滑槽的延伸方向相一致,所述防脱弧板上凸出设有适于与限位槽滑动连接的限位块。
20.通过采用上述技术方案,限位块与限位槽相配合,能够使得防脱弧板更为稳定地于滑槽内进行滑动。
21.本技术还在于提供一种并联机器人,其主动臂和从动臂之间通过上述机器人关节相连接,采用如下的技术方案:
22.一种并联机器人,每根所述主动臂端部的球头和转向轴沿主动臂轴线对称设置有两组,所述从动臂和球座对应每组球头和转向轴也设置有两组,且连接于同一所述主动臂上的两根从动臂之间连接有用于弹性拉紧两根从动臂的对拉弹簧。
23.通过采用上述技术方案,一方面,本技术并联机器人中主动臂上的球头不易从从动臂上的球座中滑脱;另一方面,两根从动臂相配合,能够增强并联机器人抓臂部分(主动
臂和从动臂整体)的强度,并同时加以对拉弹簧的弹性拉紧效果,并联机器人的主动臂和从动臂之间的连接稳定性较高,有利于保障并联机器人的正常运行。
24.可选的,所述静平台上对应每根主动臂均安装有用于驱使主动臂运动的电机和减速器,所述减速器为行星减速器。
25.通过采用上述技术方案,行星减速器能够实现低减速比、高传动效率、长寿命的特点,有利于提高并联机器人的运作效率,并在一定程度上提高并联机器人的使用寿命。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.通过于球座上开设第一球槽、第二球槽和滑槽,并在滑槽外侧可拆卸固定安装固定套对滑槽进行覆盖,能够于球座上形成防脱结构,有效防止球头从球座上脱落,增强球头与球座的连接稳定性;
28.2.通过于滑槽内安装防脱弧板、弹性件和驱动滑块,并采用螺纹件对驱动滑块进行顶紧,能够在保障球头正常运作的同时,避免球头从滑槽滑出第一球槽;
29.3.通过采用螺纹件对驱动滑块进行顶紧,操作步骤较为简易,且能够对对拉弹簧形变量进行控制,使得防脱弧板能够更为有效地封堵第一球槽与滑槽之间的通道。
附图说明
30.图1是本技术实施例机器人关节及并联机器人的整体结构示意图;
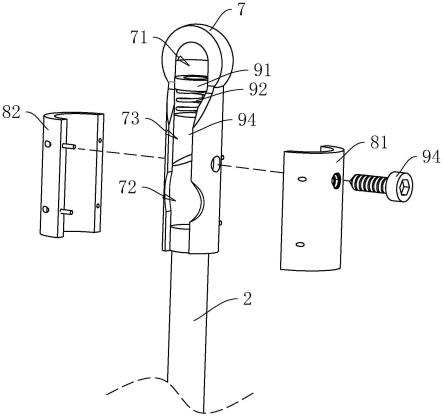
31.图2是为展示本技术实施例机器人关节所作的局部结构爆炸示意图;
32.图3是为展示本技术实施例机器人关节所作的局部结构放大示意图;
33.图4是为展示本技术实施例机器人关节的防脱组件中各部件连接关系所作的局部结构爆炸示意图;
34.图5是防脱弧板、弹性件以及驱动滑块额整体结构示意图。
35.附图标记:1、主动臂;2、从动臂;21、对拉弹簧;3、静平台;4、转向轴;5、球头;6、动平台;7、球座;71、第一球槽;72、第二球槽;73、滑槽;74、限位槽;8、固定套;81、左半套;82、右半套;9、防脱组件;91、防脱弧板;911、限位块;92、弹性件;93、驱动滑块;94、顶紧件。
具体实施方式
36.以下结合附图1-5对本技术作进一步详细说明。
37.本技术实施例公开一种机器人关节。
38.参照图1和图2,机器人关节设于并联机器人的主动臂1与从动臂2之间,用于连接主动臂1和从动臂2,其包括固定安装于主动臂1远离静平台3的一端的转向轴4、同轴固定连接于转向轴4上的球头5以及固定安装于从动臂2远离动平台6的一端的球座7。
39.具体的,主动臂1和从动臂2均为直线型、圆杆状臂,转向轴4与主动臂1相垂直,球头5一体设于转向轴4远离从动臂2的一端,且每根主动臂1下方的从动臂2均设置有两根,每根从动臂2均通过机器人关节与主动臂1球铰接。
40.相应的,参照图2和图3,球座7包括一体连接且同轴设置的球部和杆部,球座7的球部用于供球头5球铰接于球座7上,球座7的圆杆部用于套设并固定连接于从动臂2上;且球座7上开设有用于供球头5球铰接的第一球槽71、用于供球头5插入的第二球槽72以及连通第一球槽71和第二球槽72的滑槽73,第一球槽71位于球部,第二球槽72和滑槽73位于杆部,
且滑槽73为直线型槽,滑槽73的延伸方向与从动臂2的长度方向相一致,滑槽73开口的最大宽度小于球头5的直径,第一球槽71和第二球槽72的开口均呈圆形,且第一球槽71的开口面积小于第二球槽72的开口面积和球头5的最大截面面积,第二球槽72的开口面积不小于球头5的最大截面面积;操作人员可通过第二球槽72将球头5滑入球座7杆部,再通过滑槽73将球头5滑入球座7球部上的第一球槽71内。
41.为防止球头5在滑入第一球槽71后经滑槽73从第一球槽71中滑脱,球座7上还可拆卸固定安装有用于对滑槽73进行覆盖的固定套8,滑槽73内可拆卸连接有用于配合固定套8封堵滑槽73与第一球槽71之间通道的防脱组件9。
42.具体的,参照图2和图3,固定套8呈圆环状,固定套8同轴套设于球座7杆部并与球座7杆部间隙配合,固定套8覆盖于滑槽73和第二球槽72上,且固定套8靠近球座7头部的一侧表面邻近滑槽73端部;且固定套8包括相互对接且规格一致的、呈半圆环状的左半套81和右半套82,左半套81和右半套82内侧均凸出设有定位块,球座7杆部外侧开设有用于供定位块插入并卡接的定位槽(定位块和定位槽均在图中未示出),通过定位块和定位槽,能够实现左半套81和右半套82的预固定;且左半套81和右半套82相对接的一侧均开设有沉头螺孔,沉头螺孔内螺纹装配有螺栓,左半套81和右半套82之间通过沉头螺孔和螺栓进行锁止,以便固定套8对滑槽73和第二球槽72进行稳定覆盖,且拆装较为简易。
43.参照图3和图4,防脱组件9则包括防脱弧板91以及用于将防脱弧板91弹性顶紧于滑槽73与第一球槽71之间的弹性部件。
44.防脱弧板91为弧形板,防脱弧板91沿滑槽73延伸方向滑动连接于滑槽73内并与滑槽73处的球座7杆部内壁间隙配合,且防脱弧板91的弧向朝向与第一球槽71的球面弧向相适配,球座7杆部于滑槽73内还开设有与滑槽73相连通、且开口朝向与滑槽73开口朝向一致的直线的限位槽74,防脱弧板91上凸出设有与限位槽74滑动适配的限位块911;限位槽74的长度方向与滑槽73的延伸方向相一致,操作人员可将限位块911插入限位槽74内,并通过限位槽74和限位块911在滑槽73内稳定滑动防脱弧板91。
45.参照图5,弹性部件则包括一端固定连接于防脱弧板91上的弹性件92、固定连接于弹性件92远离防脱弧板91的一端的驱动滑块93以及用于防止驱动滑块93朝向第二球槽72滑动的顶紧件94。
46.参照图3和图4,弹性件92在本技术实施例中优选为弹簧,在其他申请实施例中也可以为阻尼杆或其他受压后能够形变并恢复原状的弹性部件;驱动滑块93滑动连接于滑槽73内并与滑槽73处的球座7杆部内周壁间隙配合,且驱动滑块93远离弹簧的一侧表面为楔形面;顶紧件94为螺纹件,左半套81和球座7杆部上贯穿开设有适于与顶紧件94螺纹适配的螺纹孔,螺纹孔的开口朝向与滑槽73的延伸方向相垂直,顶紧件94通过左半套81和球座7杆部上的螺纹孔插入至滑槽73内,且顶紧件94插入滑槽73的一端与驱动滑块93楔形配合。
47.将防脱弧块和弹性部件通过第二球槽72置入滑槽73后,并将防脱弧块滑动至滑槽73与第一球槽71相连通处,再采用螺纹件对驱动滑块93进行锁止,能够较为稳定地将驱动滑块93、弹性件92以及防脱弧板91顶紧于滑槽73内;同时,向滑槽73内旋入顶紧件94,随着顶紧件94不断深入滑槽73,驱动滑块93能够朝向防脱弧板91靠近,增大对拉弹簧21的形变量,使得对拉弹簧21更为有效地顶紧防脱弧板91,从而使得防脱弧板91能够在不影响球头5正常运作的情况下仍能够对球头5进行有效承托、顶紧。
48.本技术实施例机器人关节的实施原理为:通过于球座7上开设第一球槽71、第二球槽72和滑槽73,操作人员能够将球头5自第二球槽72沿滑槽73滑入第一球槽71内,使球头5在第一球槽71与球座7间隙配合并实现球铰接;同时,在滑槽73外侧可拆卸固定安装固定套8对滑槽73进行覆盖,于滑槽73内安装防脱弧板91、弹性件92和驱动滑块93,并采用螺纹件对驱动滑块93进行顶紧,能够于球座7上形成防脱结构,在保障球头5正常运作的同时,避免球头5从滑槽73滑出第一球槽71,并在从动臂2端部对球座7进行了一定的加固,增强了球座7的强度,使得从动臂2能够更为有效地承受分拣重力,进一步增强机器人关节于主动臂1和从动臂2之间的连接效果,使得主动臂1和从动臂2之间的连接更为稳定。
49.本技术还在于公开一种并联机器人,其采用如上所述的机器人关节,参照图1,其包括动平台6、静平台3、多组连杆链路和多组电机及减速器(连杆链路以及电机的组数常见为三组,也可以为四组、五组以及五组以上),执行机构放置于动平台6末端,动平台6通过多组连杆链路与静平台3连结,多组电机及减速器安装于静平台3上;连杆链路包括上述所述的主动臂1和从动臂2,主动臂1一端连接于电机的输出端、另一端通过上述所述的机器人关节与从动臂2球连接,从动臂2远离主动臂1的一端连接于动平台6上。
50.且在本技术实施例中,参照图1,并联机器人的每根主动臂1端部的球头5和转向轴4均沿主动臂1轴线对称设置有两组,从动臂2和球座7对应每组球头5和转向轴4也设置有两组,且连接于同一主动臂1上的两根从动臂2之间连接有用于弹性拉紧两根从动臂2的对拉弹簧21;本技术实施例中的减速器也优选为行星减速器,以实现低减速比、高传动效率,提高并联机器人的运作效率,并在一定程度上提高并联机器人的使用寿命。
51.本技术实施例并联机器人的实施原理为:采用上述所述的机器人关节连接主动臂1和从动臂2,本技术并联机器人中主动臂1上的球头5不易从从动臂2上的球座7中滑脱,从动臂2也能够更为有效地承受分拣重力,主动臂1和从动臂2之间的连接更为稳定,并联机器人整体运行更为平稳,且运作效率较高、使用寿命较长。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1