一种龙门架式自动化按摩机器人的制作方法
本技术涉及按摩器,具体为一种龙门架式自动化按摩机器人。
背景技术:
1、近年来,国际市场对我国按摩器具产品一直保持强劲的需求态势,而国内制造水平的提高,也为我国按摩器具制造提供了保障基础,导致世界产能逐渐转移到我国,其中一种按摩机器人是患者躺在床上进行按摩,床边常常安装着一种龙门架式自动化按摩机器人。
2、现有技术公开号cn212308385u专利文献提供了一种按摩机器人,该装置通过设置摆动机构来固定人体下肢的弯曲状态,使得腹部肌肉处于放松状态;并在按摩体按摩时,利用摆动机构带动下肢左右方向摆动,使腹直肌轻轻一层一层松开,以配合按摩体进行放松;通过设置揉动组件对按摩体作用,以模拟手掌揉动,解决了现有技术中人工按摩腹部费力且耗时长的技术问题;达到机器取代人工,机器按摩腹部的技术效果,通过设置按压组件,使得按摩体在转动的基础上,可以进行向下的按压;具体来说,利用凸轮转动抵触第二杆体,使得第二杆体带动按摩体相对于第一杆体向下运动,但是,该专利cn212308385u技术中不便于对人体的不同位置进行按摩,在需要调节位置的时候,需要人工手动进行调节,十分不方便,且该装置内的床体不便于移动位置,不方便人们对床进行移动,因此,我们需要一种龙门架式自动化按摩机器人。
技术实现思路
1、基于此,本实用新型的目的在于提供一种龙门架式自动化按摩机器人,以解决上述专利cn212308385u技术中不便于对人体的不同位置进行按摩,在需要调节位置的时候,需要人工手动进行调节,十分不方便,且该装置内的床体不便于移动位置,不方便人们对床进行移动的问题。
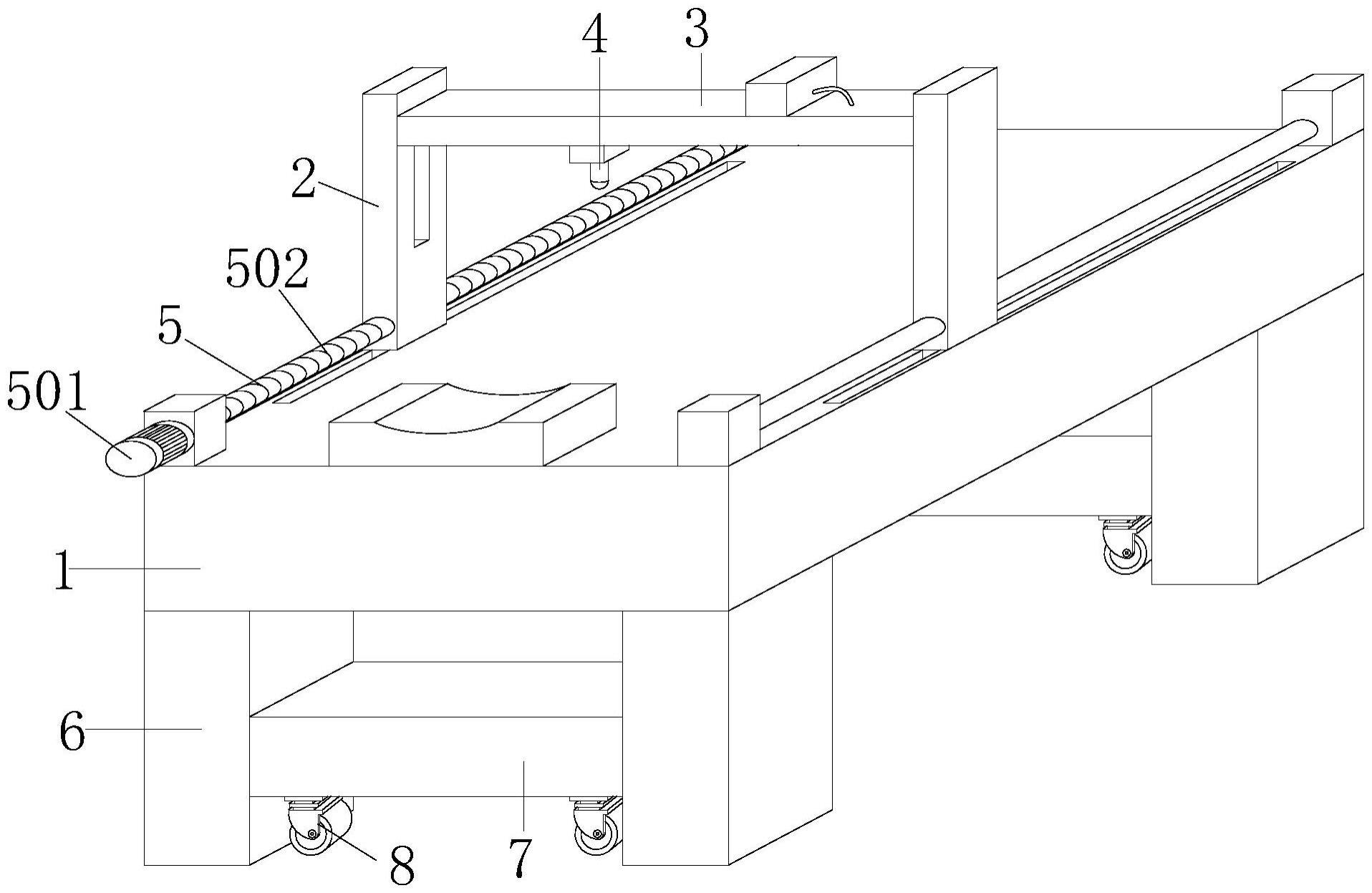
2、为实现上述目的,本实用新型提供如下技术方案:一种龙门架式自动化按摩机器人,包括床体,所述床体顶部的两侧滑动连接有移动板,且移动板的一侧安装有升降板,所述升降板的底部安装有按摩机构,所述床体的顶部设置有调节组件,所述调节组件包括第一电机、第一螺杆、第二电机、丝杆、升降块、气缸和移动块,所述床体的底部固定连接有支撑腿,且支撑腿的一侧安装有固定板,所述固定板的内部设置有移动组件。
3、优选的,所述床体的顶部安装有第一电机,且第一电机的输出端通过联轴器可拆卸连接有第一螺杆,所述第一电机通过第一螺杆与移动板构成移动结构,且第一螺杆贯穿移动板进行设置,并且第一螺杆的外螺纹与移动板的内螺纹相匹配。
4、优选的,所述移动板的内部安装有第二电机,且第二电机的输出端通过联轴器可拆卸连接有丝杆,并且丝杆的外表面螺纹连接有升降块,所述第二电机通过丝杆与升降块构成升降结构,且丝杆的外螺纹与升降块的内螺纹相匹配,并且升降块的另一侧与升降板进行连接。
5、优选的,所述升降板的内部安装有气缸,且气缸的一端固定连接有移动块,所述升降板通过气缸与移动块构成移动结构,且移动块的底部安装有按摩机构。
6、优选的,所述移动组件包括第三电机、第二螺杆、第一连接块、第二连接块、活动杆和万向轮,所述支撑腿的内部安装有第三电机,且第三电机的输出端通过联轴器可拆卸连接有第二螺杆,并且第二螺杆的外表面螺纹连接有第一连接块,所述第三电机通过第二螺杆与第一连接块构成移动结构,且第二螺杆两侧的螺纹旋向相反,并且第一连接块设置在第二螺杆的左侧。
7、优选的,所述第二螺杆的外表面螺纹连接有第二连接块,所述第三电机通过第二螺杆与第二连接块构成移动结构,且第二连接块设置在第二螺杆的右侧。
8、优选的,所述第一连接块的底部铰接有活动杆,且活动杆的底部铰接有万向轮,所述活动杆的数量为两个,且两个活动杆分别与第一连接块和第二连接块进行连接。
9、与现有技术相比,本实用新型的有益效果是:该龙门架式自动化按摩机器人,
10、(1)设置有第一电机、第一螺杆、第二电机、丝杆、升降块、气缸和移动块,通过第一电机的驱动下能使按摩机构的前后位置进行调节,然后在第二电机的驱动下能够根据不同使用人群调节按摩机构的高度,再通过气缸的作用下使按摩机构的左右位置进行调节,达到了对按摩机构位置进行全方面调节的效果,不需要人工进行调节,提高了实用性;
11、(2)设置有第三电机、第二螺杆、第一连接块、第二连接块、活动杆和万向轮,通过第三电机的作用下使第二螺杆转动,因第二螺杆两侧螺纹旋向相反,故第一连接块和第二连接块做相对运动,再通过活动杆的活动作用下使万向轮能够升降,继而方便伸出万向轮进行移动,达到了床体的可移动效果。
技术特征:
1.一种龙门架式自动化按摩机器人,包括床体(1),其特征在于:所述床体(1)顶部的两侧滑动连接有移动板(2),且移动板(2)的一侧安装有升降板(3),所述升降板(3)的底部安装有按摩机构(4),所述床体(1)的顶部设置有调节组件(5),所述调节组件(5)包括第一电机(501)、第一螺杆(502)、第二电机(503)、丝杆(504)、升降块(505)、气缸(506)和移动块(507),所述床体(1)的底部固定连接有支撑腿(6),且支撑腿(6)的一侧安装有固定板(7),所述固定板(7)的内部设置有移动组件(8)。
2.根据权利要求1所述的一种龙门架式自动化按摩机器人,其特征在于:所述床体(1)的顶部安装有第一电机(501),且第一电机(501)的输出端通过联轴器可拆卸连接有第一螺杆(502),所述第一电机(501)通过第一螺杆(502)与移动板(2)构成移动结构,且第一螺杆(502)贯穿移动板(2)进行设置,并且第一螺杆(502)的外螺纹与移动板(2)的内螺纹相匹配。
3.根据权利要求1所述的一种龙门架式自动化按摩机器人,其特征在于:所述移动板(2)的内部安装有第二电机(503),且第二电机(503)的输出端通过联轴器可拆卸连接有丝杆(504),并且丝杆(504)的外表面螺纹连接有升降块(505),所述第二电机(503)通过丝杆(504)与升降块(505)构成升降结构,且丝杆(504)的外螺纹与升降块(505)的内螺纹相匹配,并且升降块(505)的另一侧与升降板(3)进行连接。
4.根据权利要求1所述的一种龙门架式自动化按摩机器人,其特征在于:所述升降板(3)的内部安装有气缸(506),且气缸(506)的一端固定连接有移动块(507),所述升降板(3)通过气缸(506)与移动块(507)构成移动结构,且移动块(507)的底部安装有按摩机构(4)。
5.根据权利要求1所述的一种龙门架式自动化按摩机器人,其特征在于:所述移动组件(8)包括第三电机(801)、第二螺杆(802)、第一连接块(803)、第二连接块(804)、活动杆(805)和万向轮(806),所述支撑腿(6)的内部安装有第三电机(801),且第三电机(801)的输出端通过联轴器可拆卸连接有第二螺杆(802),并且第二螺杆(802)的外表面螺纹连接有第一连接块(803),所述第三电机(801)通过第二螺杆(802)与第一连接块(803)构成移动结构,且第二螺杆(802)两侧的螺纹旋向相反,并且第一连接块(803)设置在第二螺杆(802)的左侧。
6.根据权利要求5所述的一种龙门架式自动化按摩机器人,其特征在于:所述第二螺杆(802)的外表面螺纹连接有第二连接块(804),所述第三电机(801)通过第二螺杆(802)与第二连接块(804)构成移动结构,且第二连接块(804)设置在第二螺杆(802)的右侧。
7.根据权利要求5所述的一种龙门架式自动化按摩机器人,其特征在于:所述第一连接块(803)的底部铰接有活动杆(805),且活动杆(805)的底部铰接有万向轮(806),所述活动杆(805)的数量为两个,且两个活动杆(805)分别与第一连接块(803)和第二连接块(804)进行连接。
技术总结
本技术公开了一种龙门架式自动化按摩机器人,包括床体,所述床体顶部的两侧滑动连接有移动板,且移动板的一侧安装有升降板,所述升降板的底部安装有按摩机构,所述床体的顶部设置有调节组件,所述床体的底部固定连接有支撑腿,且支撑腿的一侧安装有固定板。该龙门架式自动化按摩机器人设置有第一电机、第一螺杆、第二电机、丝杆、升降块、气缸和移动块,通过第一电机的驱动下能使按摩机构的前后位置进行调节,然后在第二电机的驱动下能够根据不同使用人群调节按摩机构的高度,再通过气缸的作用下使按摩机构的左右位置进行调节,达到了对按摩机构位置进行全方面调节的效果,不需要人工进行调节,提高了实用性。
技术研发人员:洪鹏飞
受保护的技术使用者:蕲春时珍堂健康产业有限公司
技术研发日:20221202
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!