一种人形通信机房巡检机器人的制作方法
本申请涉及巡检机器人,具体涉及一种人形通信机房巡检机器人。
背景技术:
1、随着大数据、云计算等互联网应用的井喷式发展,承担核心工作的各种计算机服务器数量也呈现出指数级的增加,为确保电力系统通信系统的稳定运行,保障供电的稳定,必须对服务器进行定期巡检。
2、传统的人工运维需要耗费大量人力,并且通常会受到运维效率、操作一致性、质量和安全等典型问题的困扰。通信机房巡检机器人可实现指示灯显示状态的视觉判断、温度检测、空气质量检测、条码识别、射频识别等多种功能。通过机器人自主进行机房的定期巡检,可大大降低机房运维的人工成本,提高巡检的及时性和准确性。
技术实现思路
1、有鉴于此,本申请提供一种人形通信机房巡检机器人,以解决上述技术问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种人形通信机房巡检机器人,包括:
4、机器人躯干骨架;
5、连接在所述机器人躯干骨架外侧的外壳;
6、连接在所述机器人躯干骨架下端的移动底盘;
7、安装在所述外壳上的巡检系统;
8、连接在所述机器人躯干骨架上端与所述外壳的头部外壳支架之间的头部驱动机构,所述头部驱动机构能够驱动所述头部外壳俯仰摆动以及水平转动。
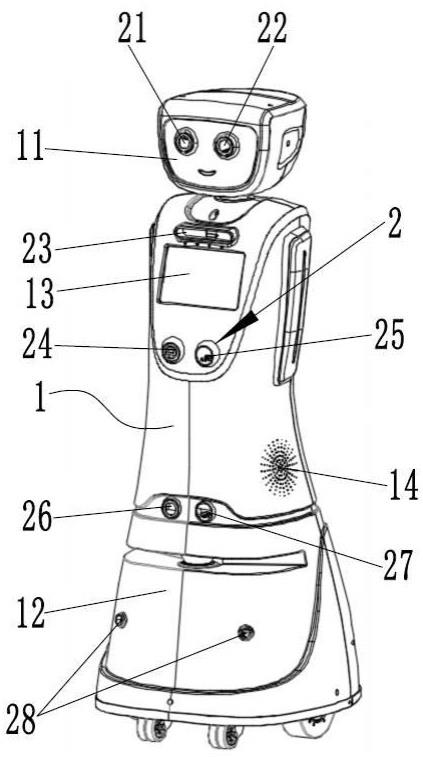
9、进一步地,所述巡检系统包括:
10、均设置在所述头部外壳上的红外相机一和可见光相机一;
11、设置在所述外壳的身体外壳上端的深度相机;
12、均设置在所述身体外壳上端的红外相机二和可见光相机二;
13、均设置在所述身体外壳下端的红外相机三和可见光相机三。
14、更进一步地,所述巡检系统还包括:
15、设置在所述身体外壳下端的超声波传感器;
16、设置在所述移动底盘上的激光雷达。
17、进一步地,所述头部驱动机构包括:
18、安装在所述机器人躯干骨架顶部的水平转动机构;
19、对称连接在所述水平转动机构上端的一对俯仰摆动机构。
20、更进一步地,所述水平转动机构包括:
21、安装在所述机器人躯干骨架顶部的驱动电机一,所述俯仰摆动机构通过颈部支架与所述驱动电机一连接;
22、连接在所述驱动电机一上的限位杆一;
23、不少于一个安装在所述机器人躯干骨架上的限位块一,所述限位块一位于所述限位杆一的转动轨迹上。
24、更进一步地,所述俯仰摆动机构包括:
25、与所述颈部支架相连接的驱动电机二,所述头部外壳的头部外壳支撑架的一端与所述驱动电机二相连接,所述头部外壳支撑架的另一端安装在轴承内,所述轴承与所述颈部支架相连接;
26、连接在相应的所述驱动电机二上的限位杆二;
27、不少于一个安装在所述颈部支架顶部的限位块二,所述限位块二位于所述限位杆二的转动轨迹上。
28、进一步地,所述移动底盘上设有:
29、电池;
30、电控器件;
31、悬架机构;
32、用于行走的移动轮组件。
33、更进一步地,所述移动轮组件包括:
34、对称设置在所述移动底盘左右两侧的一对驱动轮;
35、间隔设置在所述移动底盘的前后两端的两对万向轮。
36、进一步地,所述身体外壳上还设有显示屏和喇叭孔。
37、从上述的技术方案可以看出,本实用新型的优点是:
38、1.本申请中能够代替人工,完成机房的定期巡检运维工作,不仅能够使得工作效率大大提高,且巡检结果更加准确。
39、2.本申请的头部能够进行俯仰摆动以及水平转动,从而实现更大范围的巡检,从而提高巡检效率。
技术特征:
1.一种人形通信机房巡检机器人,其特征在于,包括:
2.根据权利要求1所述的人形通信机房巡检机器人,其特征在于,所述巡检系统(2)包括:
3.根据权利要求2所述的人形通信机房巡检机器人,其特征在于,所述巡检系统(2)还包括:
4.根据权利要求1所述的人形通信机房巡检机器人,其特征在于,所述头部驱动机构(3)包括:
5.根据权利要求4所述的人形通信机房巡检机器人,其特征在于,所述水平转动机构包括:
6.根据权利要求5所述的人形通信机房巡检机器人,其特征在于,所述俯仰摆动机构包括:
7.根据权利要求1所述的人形通信机房巡检机器人,其特征在于,所述移动底盘(16)上设有:
8.根据权利要求7所述的人形通信机房巡检机器人,其特征在于,所述移动轮组件包括:
9.根据权利要求2所述的人形通信机房巡检机器人,其特征在于,所述身体外壳(12)上还设有显示屏(13)和喇叭孔(14)。
技术总结
本申请公开了一种人形通信机房巡检机器人,涉及巡检机器人技术领域,包括:机器人躯干骨架;连接在所述机器人躯干骨架外侧的外壳;连接在所述机器人躯干骨架下端的移动底盘;安装在所述外壳上的巡检系统;连接在所述机器人躯干骨架上端与所述外壳的头部外壳支架之间的头部驱动机构,所述头部驱动机构能够驱动所述头部外壳俯仰摆动以及水平转动,本申请能够代替人工巡检,从而在节省人力的同时提高巡检的准确性、可靠性以及工作效率。
技术研发人员:李俊,颜泗海,谢宇宸,林保霖,曾鑫颖,张宏坡,刘景茹,黄钿捷
受保护的技术使用者:国网福建省电力有限公司泉州供电公司
技术研发日:20221209
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!