夹具及机器人的制作方法
本技术涉及产品输送,具体而言,涉及一种夹具及机器人。
背景技术:
1、相同的物料一般盛装在物料架中进行批量输送,现有技术一般通过机器人的末端夹具夹持物料架,然后将其输送至目的地,然而现有夹具一般仅对物料架的夹持位置、夹持力度等进行检测校准,而不涉及对物料架上物料放置位置的检测,需要安排专门的检测人员对物料的放置位置是否合格进行人工检测,耗费人工劳动力较多且检测效率低。
技术实现思路
1、本实用新型的目的包括提供一种夹具及机器人,以解决现有夹具无法对物料架上物料的放置位置进行检测,需要安排检测人员进行人工检测,耗费人工劳动力较多且检测效率低的技术问题。
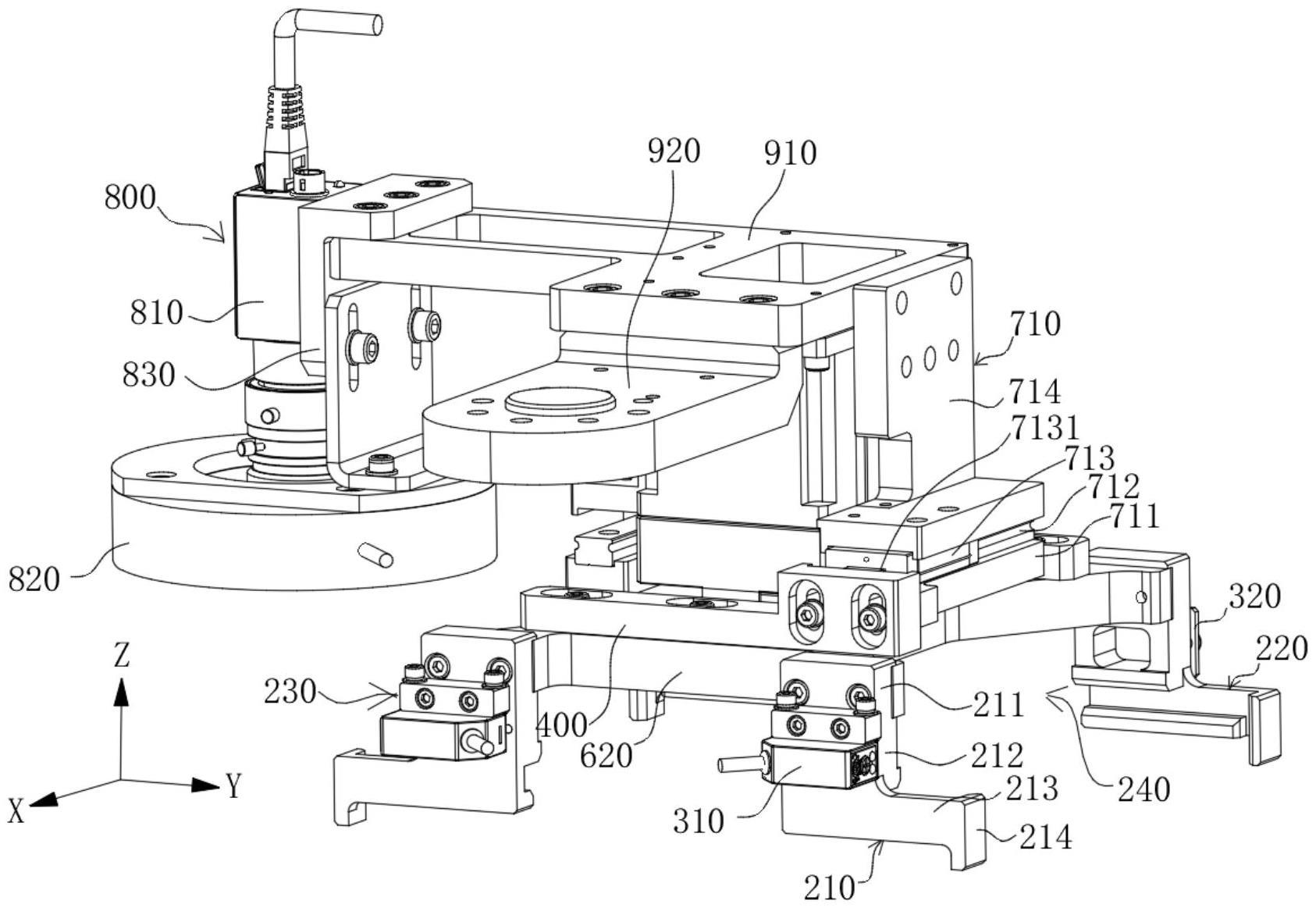
2、为解决上述问题,本实用新型提供一种夹具,包括驱动组件和连接于所述驱动组件的多组夹爪,所述驱动组件用于驱动多组所述夹爪相向或背向运动;所述夹爪沿背离所述驱动组件的z向包括安装部和夹持部,各所述安装部组成安装围,所述安装围安装有位置检测组件,所述位置检测组件用于检测所述安装围围成的检测空间内是否存在障碍物。
3、可选地,所述位置检测组件包括光电传感器和反射板,所述光电传感器安装于其中一组所述夹爪的安装部,所述反射板安装于另一组所述夹爪的安装部,且所述反射板与所述光电传感器相对应。
4、可选地,所述光电传感器和所述反射板均位于相应所述安装部背离所述检测空间的一侧,且所述安装部设有供所述光电传感器与所述反射板之间光路通过的通光孔。
5、可选地,所述驱动组件的驱动端连接有两根连接臂,用于驱动两根所述连接臂沿x向移动;所述连接臂背离所述驱动组件的一端连接有沿y向延伸的承载臂,所述夹爪为两组且一一对应设置于两根所述承载臂。
6、可选地,所述夹具还包括两组沿x向延伸的导向组件,其中一组所述导向组件连接于所述驱动组件y向的第一侧与其中一根所述承载臂之间,另一组所述导向组件连接于所述驱动组件y向的第二侧与另一所述承载臂之间。
7、可选地,所述夹具还包括调节座、第一连接件和第二连接件,所述调节座包括沿y向延伸的梁体和位于所述梁体一端的座体,所述梁体设有沿y向延伸的第一腰型孔,所述座体设有沿z向延伸的第二腰型孔;
8、所述第一连接件包括第一连接杆和连接于所述第一连接杆一端的第一限位头,所述第一连接杆穿过所述第一腰型孔连接于所述承载臂,所述第一限位头抵接于所述第一腰型孔的孔端面;所述第二连接件包括第二连接杆和连接于所述第二连接杆一端的第二限位头,所述第二连接杆穿过所述第二腰型孔连接于相应的所述导向组件,所述第二限位头抵接于所述第二腰型孔的孔端面。
9、可选地,两个所述承载臂分别为第一承载臂和第二承载臂,连接于所述第一承载臂的所述连接臂为第一连接臂、所述导向组件为第一导向组件,连接于所述第二承载臂的所述连接臂为第二连接臂、所述导向组件为第二导向组件,所述第一导向组件、所述第二连接臂、所述第一连接臂和所述第二导向组件沿y向依次排布。
10、可选地,所述夹持部朝向所述检测空间的一侧设有沿y向延伸的限位槽,所述限位槽用于对待夹持件的夹持翻边进行限位。
11、可选地,所述夹具还包括照相组件,所述照相组件用于检测所述夹爪所在位置。
12、本实用新型还提供了一种机器人,包括控制器、机械臂和上述夹具,所述机械臂的传动端与所述夹具的驱动组件连接,所述机械臂、所述驱动组件及所述夹具的位置检测组件均与所述控制器连接。
13、本实用新型提供的夹具中,安装部围成的检测空间位于夹持部夹持物料架时的开口一侧,设置于安装部的位置检测组件通过对检测空间是否存在障碍物的检测,以实现对物料架中物料放置位置是否达标的检测,从而通过智能检测、控制,将物料放置位置达标的物料架正常输送至目的地,并将物料放置位置异常的物料架筛选出来,以便操作人员对位置异常的物料进行位置修整,夹具的结构简单、功能性强,相应地,无需人工对物料放置位置进行检测,耗费人工劳动力低且检测效率较高。
技术特征:
1.一种夹具,其特征在于,包括驱动组件(100)和连接于所述驱动组件(100)的多组夹爪,所述驱动组件(100)用于驱动多组所述夹爪相向或背向运动;所述夹爪沿背离所述驱动组件(100)的z向包括安装部(212)和夹持部(213),各所述安装部(212)组成安装围(230),所述安装围(230)安装有位置检测组件(300),所述位置检测组件(300)用于检测所述安装围(230)围成的检测空间(240)内是否存在障碍物。
2.根据权利要求1所述的夹具,其特征在于,所述位置检测组件(300)包括光电传感器(310)和反射板(320),所述光电传感器(310)安装于其中一组所述夹爪的安装部(212),所述反射板(320)安装于另一组所述夹爪的安装部(212),且所述反射板(320)与所述光电传感器(310)相对应。
3.根据权利要求2所述的夹具,其特征在于,所述光电传感器(310)和所述反射板(320)均位于相应所述安装部(212)背离所述检测空间(240)的一侧,且所述安装部(212)设有供所述光电传感器(310)与所述反射板(320)之间光路通过的通光孔(2121)。
4.根据权利要求1-3任一项所述的夹具,其特征在于,所述驱动组件(100)的驱动端连接有两根连接臂,用于驱动两根所述连接臂沿x向移动;所述连接臂背离所述驱动组件(100)的一端连接有沿y向延伸的承载臂,所述夹爪为两组且一一对应设置于两根所述承载臂。
5.根据权利要求4所述的夹具,其特征在于,所述夹具还包括两组沿x向延伸的导向组件,其中一组所述导向组件连接于所述驱动组件(100)y向的第一侧与其中一根所述承载臂之间,另一组所述导向组件连接于所述驱动组件(100)y向的第二侧与另一所述承载臂之间。
6.根据权利要求5所述的夹具,其特征在于,所述夹具还包括调节座(400)、第一连接件(510)和第二连接件(520),所述调节座(400)包括沿y向延伸的梁体(410)和位于所述梁体(410)一端的座体(420),所述梁体(410)设有沿y向延伸的第一腰型孔(411),所述座体(420)设有沿z向延伸的第二腰型孔(421);
7.根据权利要求5所述的夹具,其特征在于,两个所述承载臂分别为第一承载臂(620)和第二承载臂(640),连接于所述第一承载臂(620)的所述连接臂为第一连接臂(610)、所述导向组件为第一导向组件(710),连接于所述第二承载臂(640)的所述连接臂为第二连接臂(630)、所述导向组件为第二导向组件(720),所述第一导向组件(710)、所述第二连接臂(630)、所述第一连接臂(610)和所述第二导向组件(720)沿y向依次排布。
8.根据权利要求1-3任一项所述的夹具,其特征在于,所述夹持部(213)朝向所述检测空间(240)的一侧设有沿y向延伸的限位槽(2131),所述限位槽(2131)用于对待夹持件的夹持翻边(11)进行限位。
9.根据权利要求1-3任一项所述的夹具,其特征在于,所述夹具还包括照相组件(800),所述照相组件(800)用于检测所述夹爪所在位置。
10.一种机器人,其特征在于,包括控制器、机械臂和权利要求1-9任一项所述的夹具,所述机械臂的传动端与所述夹具的驱动组件(100)连接,所述机械臂、所述驱动组件(100)及所述夹具的位置检测组件(300)均与所述控制器连接。
技术总结
本技术提供一种夹具及机器人,涉及产品输送技术领域。该夹具包括驱动组件和连接于驱动组件的多组夹爪,驱动组件用于驱动多组夹爪相向或背向运动;夹爪沿背离驱动组件的Z向包括安装部和夹持部,各安装部组成安装围,安装围安装有位置检测组件,位置检测组件用于检测安装围围成的检测空间内是否存在障碍物。该机器人包括控制器、机械臂和上述夹具,机械臂的传动端与夹具的驱动组件连接,机械臂、驱动组件及夹具的位置检测组件均与控制器连接。该夹具中的位置检测组件能够对物料架中物料的放置位置进行检测,检测效率高且能够有效减少人工劳动力的耗费。
技术研发人员:罗金荣,陈兆芃,王争,黎田
受保护的技术使用者:北京思灵机器人科技有限责任公司
技术研发日:20221219
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!