用于金属板的三坐标直线模组机械搬运臂的制作方法
本技术涉及板材加工,具体为用于金属板的三坐标直线模组机械搬运臂。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性。
2、当前在进行金属板的搬运时需要通过机械臂进行搬运操作,而现有的三坐标直线模组机械臂在进行使用时往往无法进行金属板在进行夹持后的多角度控制,使得金属板在进行堆叠时常因角度的无法及时调整,从而影响在进行堆放时的成型效果,且现有的搬运臂往往无法进行轨道的运输,从而导致搬运时的效果较差。
技术实现思路
1、本实用新型的目的在于提供用于金属板的三坐标直线模组机械搬运臂,以解决上述背景技术中提出的现有的机械搬运臂在进行使用时往往无法进行金属板在进行夹持后的多角度控制,使得金属板在进行堆叠时常因角度的无法及时调整的问题。
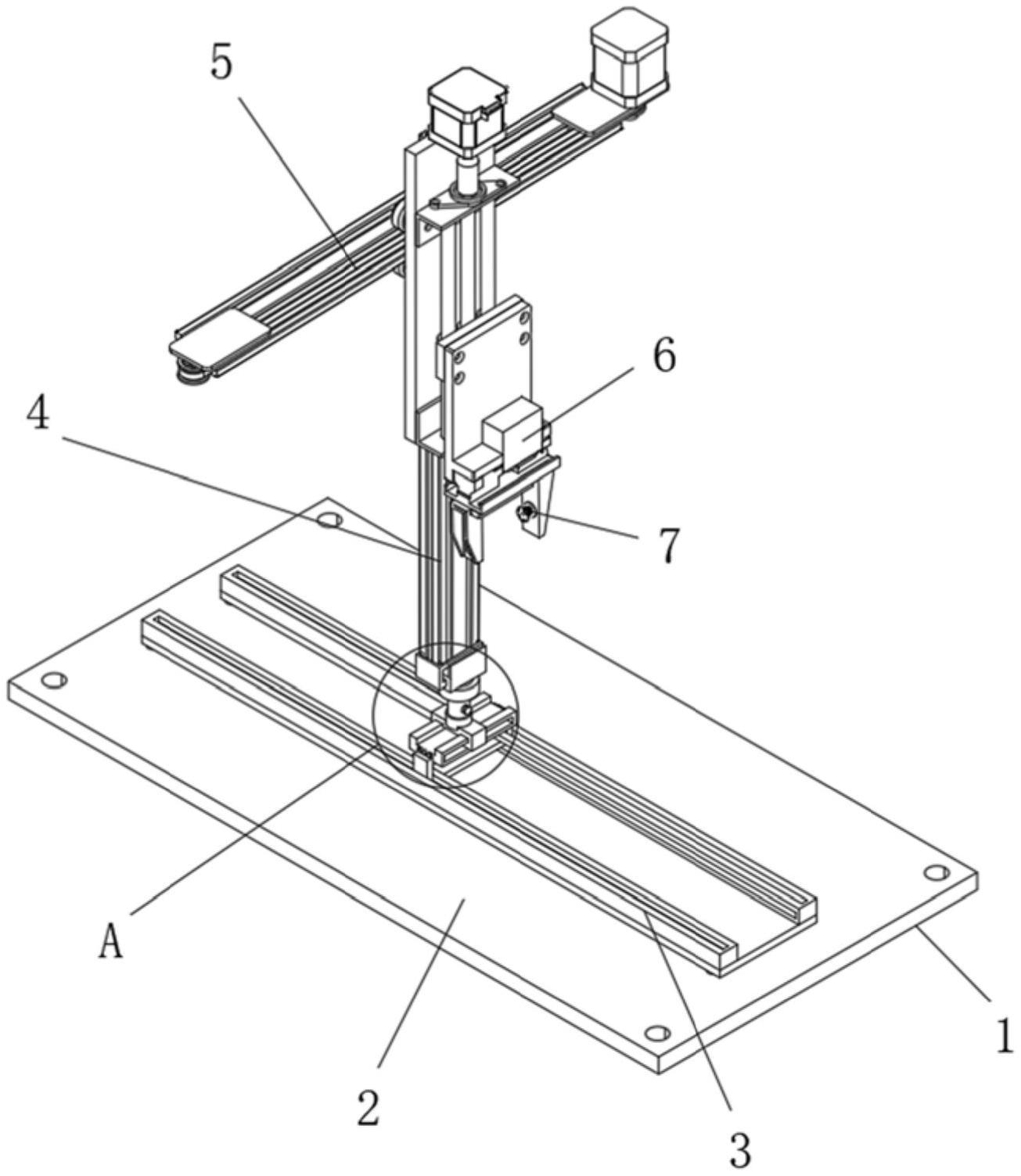
2、为实现上述目的,本实用新型提供如下技术方案:用于金属板的三坐标直线模组机械搬运臂,包括机体、安装固定板和滑动机构,所述机体的底端安装有安装固定板,所述安装固定板的顶端连接有滑动机构,所述滑动机构的顶端连接有支撑架,所述支撑架的顶端设置有活动机构,所述活动机构的外部安装有夹持座,所述夹持座的内侧壁设置有转动机构;
3、转动机构,所述转动机构包括工作电机、第二固定板和转动轴承,所述工作电机安装在夹持座的内部,所述工作电机的输出端固定连接有第二固定板,所述第二固定板的外侧壁设置有转动轴承,所述转动轴承的内部插设有夹持板。
4、优选的,所述夹持板的外表面为粗糙结构的金属钢板,所述夹持板贯穿插设在转动轴承和第二固定板的内部。
5、优选的,所述夹持板在转动轴承上转动连接,所述第二固定板固定连接在工作电机的输出端外侧壁。
6、优选的,所述滑动机构包括滑动轨道、活动板座和套设座,所述滑动轨道固定安装在安装固定板的顶端,所述活动板座设置在滑动轨道的顶端,所述套设座套设在活动板座的外部,所述固定座固定连接在套设座的顶端外部。
7、优选的,所述套设座在活动板座的外部滑动连接,所述固定座通过螺丝固定安装在套设座的顶端外部。
8、优选的,所述活动机构包括第一固定板、转动轮和滑动槽架,所述第一固定板安装在支撑架的外部,所述第一固定板的外侧壁安装有转动轮,所述转动轮的底端连接有滑动槽架。
9、优选的,所述转动轮设置有两个,所述转动轮的外部为粗糙结构的橡胶轮,所述滑动槽架在转动轮的外部滑动连接。
10、与现有技术相比,本实用新型的有益效果是:
11、1、通过设置的工作电机、第二固定板、转动轴承和夹持板使得当在进行板材进行夹持后的多角度转动时,通过夹持板能够对板材进行夹持操作,此时工作电机进行工作,带动夹持板在转动轴承的内部进行转动,从而控制夹持板在转动后,对板材进行角度调节控制,进而方便进行板材在进行夹持运输后的转动调节,方便进行码垛归类;
12、2、通过设置的滑动轨道、活动板座、套设座和固定座使得当在进行搬运时的远距离运输及控制调节时,通过活动板座在滑动轨道上的滑动伸缩,及套设座在活动板座上的滑动调节,能够对固定座进行远距离的运输操作,从而当在进行板材搬运时的多场景使用时,能够方便进行多场景的适用,增加搬运臂的使用实用性。
技术特征:
1.用于金属板的三坐标直线模组机械搬运臂,包括机体(1)、安装固定板(2)和滑动机构(3),其特征在于:所述机体(1)的底端安装有安装固定板(2),所述安装固定板(2)的顶端连接有滑动机构(3),所述滑动机构(3)的顶端连接有支撑架(4),所述支撑架(4)的顶端设置有活动机构(5),所述活动机构(5)的外部安装有夹持座(6),所述夹持座(6)的内侧壁设置有转动机构(7);
2.根据权利要求1所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述夹持板(704)的外表面为粗糙结构的金属钢板,所述夹持板(704)贯穿插设在转动轴承(703)和第二固定板(702)的内部。
3.根据权利要求1所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述夹持板(704)在转动轴承(703)上转动连接,所述第二固定板(702)固定连接在工作电机(701)的输出端外侧壁。
4.根据权利要求1所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述滑动机构(3)包括滑动轨道(301)、活动板座(302)和套设座(303)和固定座(304),所述滑动轨道(301)固定安装在安装固定板(2)的顶端,所述活动板座(302)设置在滑动轨道(301)的顶端,所述套设座(303)套设在活动板座(302)的外部,所述固定座(304)固定连接在套设座(303)的顶端外部。
5.根据权利要求4所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述套设座(303)在活动板座(302)的外部滑动连接,所述固定座(304)通过螺丝固定安装在套设座(303)的顶端外部。
6.根据权利要求1所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述活动机构(5)包括第一固定板(501)、转动轮(502)和滑动槽架(503),所述第一固定板(501)安装在支撑架(4)的外部,所述第一固定板(501)的外侧壁安装有转动轮(502),所述转动轮(502)的底端连接有滑动槽架(503)。
7.根据权利要求6所述的用于金属板的三坐标直线模组机械搬运臂,其特征在于:所述转动轮(502)设置有两个,所述转动轮(502)的外部为粗糙结构的橡胶轮,所述滑动槽架(503)在转动轮(502)的外部滑动连接。
技术总结
本技术公开了用于金属板的三坐标直线模组机械搬运臂,包括机体、安装固定板和滑动机构,所述机体的底端安装有安装固定板,所述安装固定板的顶端连接有滑动机构,所述滑动机构的顶端连接有支撑架,所述支撑架的顶端设置有活动机构。该金属板的三坐标直线模组机械搬运臂,通过设置的工作电机、第二固定板、转动轴承和夹持板使得当在进行板材进行夹持后的多角度转动时,通过夹持板能够对板材进行夹持操作,此时工作电机进行工作,带动夹持板在转动轴承的内部进行转动,从而控制夹持板在转动后,对板材进行角度调节控制,进而方便进行板材在进行夹持运输后的转动调节,方便进行码垛归类。
技术研发人员:杜东
受保护的技术使用者:天津梦佳智创科技发展有限公司
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!