机械手的制作方法
本申请涉及半导体制造领域,具体地,涉及一种机械手。
背景技术:
1、物理气相沉积(physical vapor deposition,pvd)是指在真空条件下,利用气体放电使靶材蒸发,并使蒸发物质与气体均发生电离,利用电场的加速作用,使被蒸发物质及其反应产物沉积在晶圆上。此技术广泛应用于ic、封装、led等领域。
2、物理气相沉积工艺中需要通过机械手传输晶圆,现有的机械手在传输翘曲比较大的晶圆时,晶圆背面与机械手接触,有可能会破坏晶圆表面,造成晶圆划伤报废。
3、因此,如何避免托起翘曲的晶圆时划伤晶圆是本领域技术人员急需解决的技术问题。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一,提出了一种机械手,其通过支撑部支撑晶圆,支撑部的支撑面与托手的第一表面之间形成让位空间,为翘曲的晶圆让位,避免晶圆接触托手,进而避免划伤晶圆。
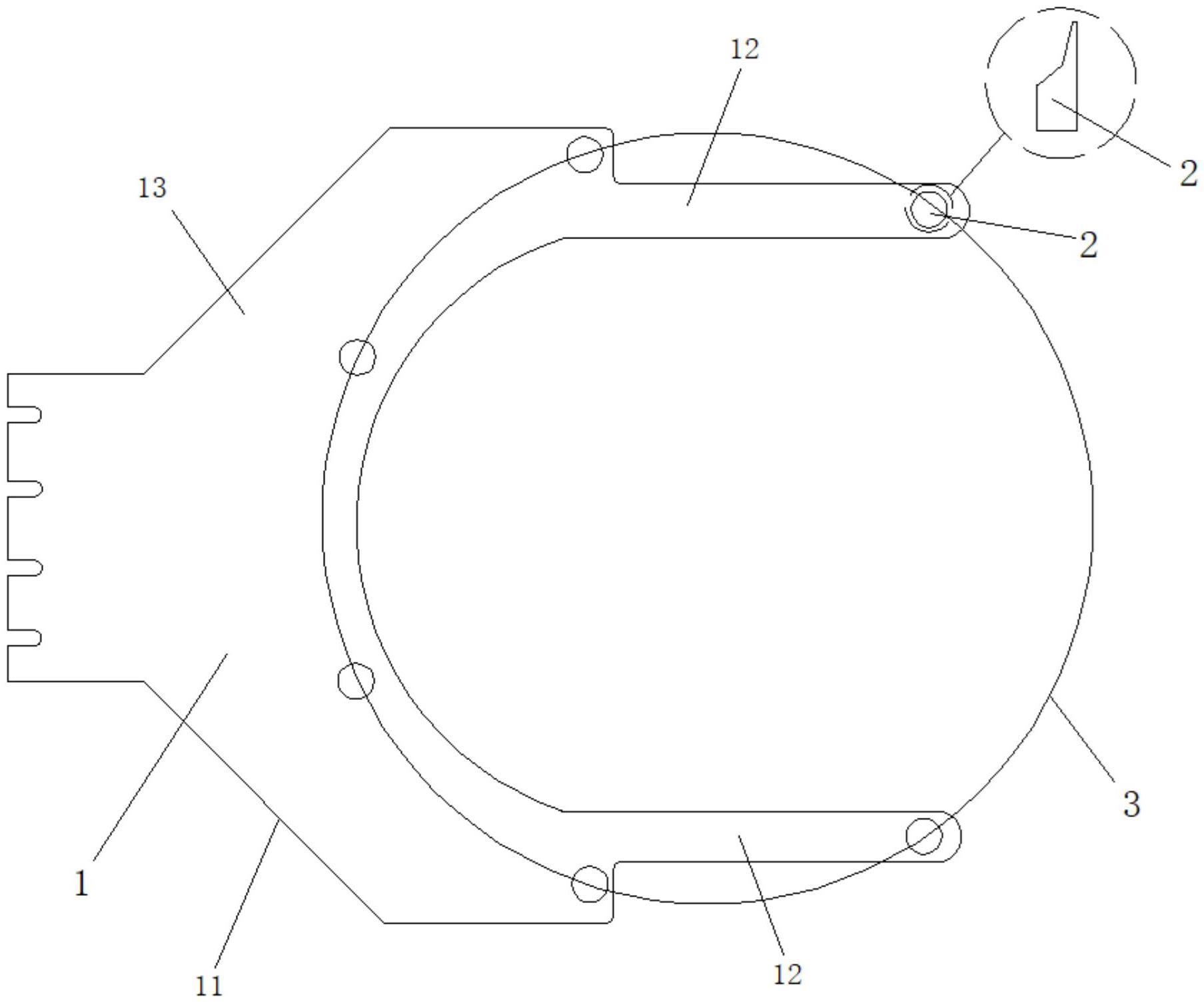
2、为实现本申请的目的而提供一种机械手,用于托起晶圆,包括托手和多个支撑部;
3、各个支撑部在托手的第一表面上沿预设圆周分布,用于支撑晶圆的边缘,支撑部远离托手的一端具有用于支撑晶圆支撑面,各个支撑部的支撑面与第一表面之间形成让位空间,让位空间用于在托起翘曲的晶圆时为其让位。
4、在一些实施例中,支撑面与第一表面之间的距离,沿靠近预设圆周的圆心的方向逐渐缩小。
5、在一些实施例中,支撑部远离托手的一端还设有限位部,限位部凸起于支撑面,且位于支撑面远离预设圆周的圆心的一侧,限位部用于对晶圆进行径向限位。
6、在一些实施例中,限位部靠近支撑面的一侧具有限位面,限位面与预设圆周的圆心之间的距离,沿远离第一表面的方向逐渐增加。
7、在一些实施例中,托手与支撑部为一体成型结构。
8、在一些实施例中,托手包括托手本体和两条托臂,托臂的一端与托手本体相连,另一端悬置,托手本体和/或托臂上设有支撑部;
9、两条托臂之间形成让位缺口,预设圆周的圆心在第一表面的正投影位于让位缺口中。
10、在一些实施例中,托手本体设有弧形让位口,弧形让位口与让位缺口连通。
11、在一些实施例中,两条托臂相互平行,并关于第一表面内的预设直线对称分布,各个支撑部对称分布于预设直线的两侧。
12、在一些实施例中,支撑部的数量为6个,托臂远离托手本体的一端设有一个支撑部,其余4个支撑部设置于托手本体上。
13、在一些实施例中,托手和支撑部为陶瓷结构件。
14、本申请具有以下有益效果:
15、本申请提供的机械手,用于托起晶圆,包括托手和多个支撑部;多个支撑部在托手的第一表面上沿预设圆周分布,用于支撑晶圆的边缘,支撑部远离托手的一端具有用于支撑晶圆支撑面,各个支撑部的支撑面与第一表面之间形成让位空间。
16、在机械手托起翘曲的晶圆时,支撑部的支撑面贴合并支撑晶圆,翘曲的晶圆的最低点处于让位空间中,避免晶圆与托手接触,进而避免转运晶圆的过程中,机械手将晶圆划伤。
技术特征:
1.一种机械手,用于托起晶圆,其特征在于,包括托手和多个支撑部;
2.根据权利要求1所述的机械手,其特征在于,所述支撑面与所述第一表面之间的距离,沿靠近所述预设圆周的圆心的方向逐渐缩小。
3.根据权利要求1所述的机械手,其特征在于,所述支撑部远离所述托手的一端还设有限位部,所述限位部凸起于所述支撑面,且位于所述支撑面远离所述预设圆周的圆心的一侧,所述限位部用于对所述晶圆进行径向限位。
4.根据权利要求3所述的机械手,其特征在于,所述限位部靠近所述支撑面的一侧具有限位面,所述限位面与所述预设圆周的圆心之间的距离,沿远离所述第一表面的方向逐渐增加。
5.根据权利要求1所述的机械手,其特征在于,所述托手与所述支撑部为一体成型结构。
6.根据权利要求1至5任意一项所述的机械手,其特征在于,所述托手包括托手本体和两条托臂,所述托臂的一端与所述托手本体相连,另一端悬置,所述托手本体和/或所述托臂上设有所述支撑部;
7.根据权利要求6所述的机械手,其特征在于,所述托手本体设有弧形让位口,所述弧形让位口与所述让位缺口连通。
8.根据权利要求6所述的机械手,其特征在于,两条所述托臂相互平行,并关于所述第一表面内的预设直线对称分布,各个所述支撑部对称分布于所述预设直线的两侧。
9.根据权利要求7所述的机械手,其特征在于,所述支撑部的数量为6个,所述托臂远离所述托手本体的一端设有一个所述支撑部,其余4个所述支撑部设置于所述托手本体上。
10.根据权利要求7所述的机械手,其特征在于,所述托手和所述支撑部为陶瓷结构件。
技术总结
本申请提供一种机械手,用于托起晶圆,包括托手和多个支撑部;多个支撑部在托手的第一表面上沿预设圆周分布,用于支撑晶圆的边缘,支撑部远离托手的一端具有用于支撑晶圆支撑面,各个支撑部的支撑面与第一表面之间形成让位空间。在机械手托起翘曲的晶圆时,支撑部的支撑面贴合并支撑晶圆,翘曲的晶圆的最低点处于让位空间中,避免晶圆与托手接触,进而避免转运晶圆的过程中,机械手将晶圆划伤。
技术研发人员:许利利,杨依龙
受保护的技术使用者:北京北方华创微电子装备有限公司
技术研发日:20221227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!